Autoware v1.1快速入门指南:基于2016开源自动驾驶软件
需积分: 9 23 浏览量
更新于2024-07-14
收藏 1.87MB PDF 举报
Autoware是一款基于ROS(Robot Operating System,机器人操作系统)的开源软件,由名古屋大学开发,主要用于自动驾驶领域的研究与开发。该软件主要适用于Linux系统,并支持多种硬件平台,如eSOL和eMCOS操作系统,以及不同的CPU、GPU、摄像头、GNSS(全球导航卫星系统)和LIDAR(激光雷达)设备。Autoware的核心功能包括但不限于:
1. **定位**:Autoware提供高精度的车辆位置估计,通过集成的定位算法确保自动驾驶系统能够准确感知其在环境中的位置。
2. **目标检测**:软件内置了先进的物体检测模块,能够识别并跟踪周围环境中的人、车、路标等目标,这对于实现避障和路径规划至关重要。
3. **驾驶控制**:Autoware负责车辆的运动控制,包括决策制定、路径规划和执行,确保车辆能在预设的规则或环境中安全行驶。
4. **3D地图生成与分享**:Autoware支持生成和共享3D地图,这些地图可以供其他自动驾驶系统使用,提高导航和规划的准确性。
软件架构中,Autoware的Runtime Manager负责管理和协调各个组件的运行,而Rviz则是一个强大的可视化工具,用于实时监控和回放传感器数据,方便开发者调试和分析系统的交互行为。此外,Autoware还支持Autoware Rider,一个车载界面,允许驾驶员查看关键信息,同时配合平板电脑或头戴式设备(如Oculus)提供沉浸式体验。
在使用Autoware时,数据通常会以ROS bag文件的形式存储,这是一种方便的机制,便于后续的数据分析和系统复现。通过replay功能,开发者可以在没有实际传感器的情况下,反复测试和优化系统性能。
Autoware作为一个完整的自动驾驶软件框架,集成了多个关键的功能模块,并充分利用ROS生态的优势,为研究人员和工程师提供了强大的工具来构建和测试自动驾驶系统。
A utoware (ROS)
Runtime Manager Rviz
ROSPC
AutowareRider
Tablet
Oculus
Display on vehicle
Available user Interfaces
4
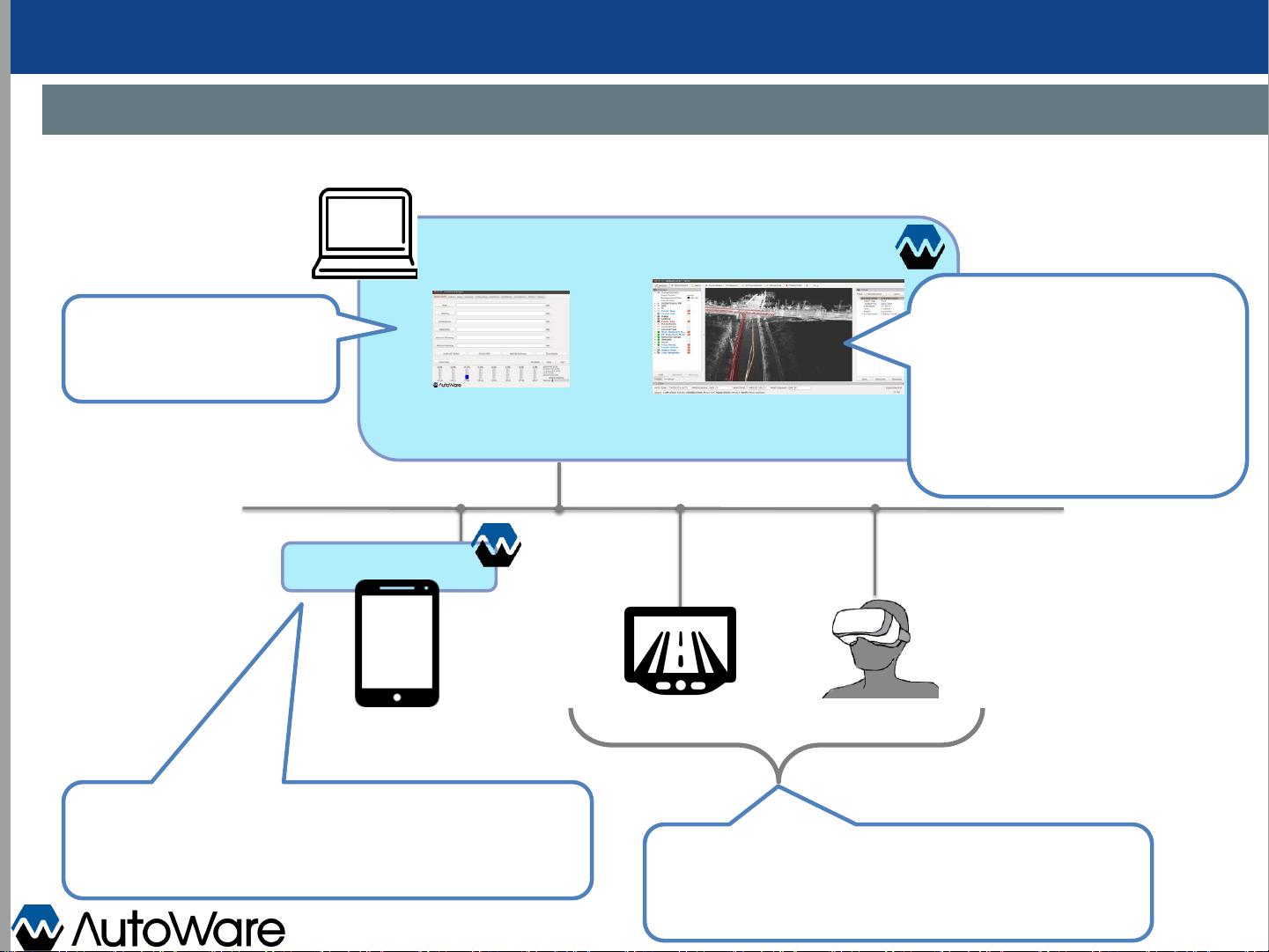
2. USER INTERFACE
Runtime Manager
A GUI application for
controlling Autoware.
RViz
Visualizes in 3D the various
functions of Autoware such as
localization, object-detection,
path-planning, path-following, in
an integrated manner.
AutowareRider
A tablet application for setting and generating a route
plan, turning autonomous driving mode on.
Other UIs
It is possible to visualize the 3D map being used on
the in-vehicle displays and device such as Oculus.
剩余15页未读,继续阅读
2020-06-21 上传
2020-05-04 上传
2019-04-03 上传
2023-05-16 上传
2023-05-27 上传
2023-06-03 上传
2023-03-17 上传
2023-11-18 上传
2023-06-03 上传

ywfwyht
- 粉丝: 8995
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
