单片机C语言CAN总线通信:CAN总线原理、配置和使用,实现设备间的可靠通信
发布时间: 2024-07-06 23:14:04 阅读量: 224 订阅数: 44 
# 1. CAN总线概述
CAN(控制器局域网络)总线是一种广泛应用于汽车、工业自动化和医疗等领域的串行通信协议。它以其高可靠性、高传输速率和低成本等优点而著称。
CAN总线采用多主站结构,支持多台设备同时连接在同一总线上,并通过竞争仲裁机制实现数据的优先级访问。它具有错误检测和纠正功能,确保数据传输的可靠性。
# 2. CAN总线通信原理
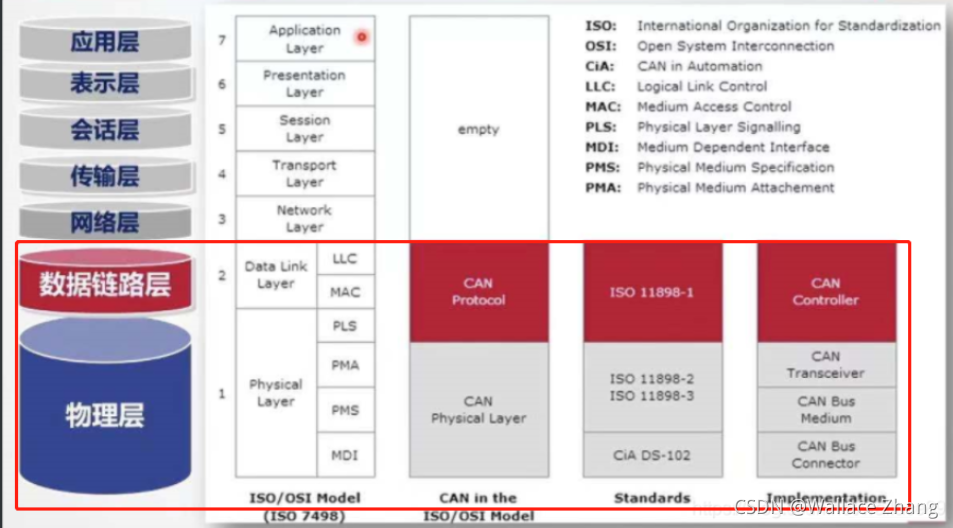
### 2.1 CAN总线网络结构和协议
CAN总线采用多主总线结构,所有节点都连接在同一总线上,可以同时发送和接收数据。总线上的所有节点都共享一条双绞线,称为CAN总线。CAN总线协议是一种多主多从协议,每个节点都可以主动发送数据,也可以被动接收数据。
CAN总线网络中,节点之间通过CAN控制器进行通信。CAN控制器负责接收和发送数据,并管理总线访问。每个CAN控制器都有一个唯一的ID,称为节点ID。节点ID决定了节点在总线上的优先级,ID较小的节点具有更高的优先级。
CAN总线协议规定了数据传输的规则,包括数据帧格式、传输机制和错误处理机制。CAN总线数据帧采用非破坏性仲裁机制,当多个节点同时发送数据时,节点ID较小的节点将获得总线访问权。
### 2.2 CAN总线数据帧格式和传输机制
CAN总线数据帧由以下部分组成:
- 起始位(SOF):表示数据帧的开始。
- 仲裁字段:包含节点ID和远程传输请求位。
- 控制字段:包含数据帧的长度和类型。
- 数据字段:包含要传输的数据。
- CRC字段:包含循环冗余校验码,用于检测数据传输中的错误。
- 确认字段(ACK):表示接收节点已正确接收数据帧。
- 结束位(EOF):表示数据帧的结束。
CAN总线采用非破坏性仲裁机制,当多个节点同时发送数据时,节点ID较小的节点将获得总线访问权。仲裁过程如下:
1. 所有发送节点同时发送仲裁字段。
2. 每个节点比较自己的仲裁字段与总线上的仲裁字段。
3. 如果自己的仲裁字段优先级更高,则继续发送数据帧;否则,停止发送。
数据帧传输过程如下:
1. 发送节点发送数据帧。
2. 总线上的所有节点接收数据帧。
3. 接收节点比较数据帧的CRC字段与自己计算的CRC字段。
4. 如果CRC字段匹配,则接收节点发送确认字段(ACK);否则,不发送ACK。
5. 发送节点收到ACK后,表示数据帧已成功传输。
# 3. 单片机C语言CAN总线配置
### 3.1 CAN控制器初始化和配置
#### 3.1.1 CAN控制器初始化
CAN控制器初始化主要包括以下步骤:
1. **时钟配置:**为CAN控制器提供时钟源,通常使用内部时钟或外部时钟。
2. **波特率设置:**根据CAN网络要求设置CAN控制器波特率,以确保数据传输的正确性。
3. **模式设置:**配置CAN控制器的工作模式,如正常模式、监听模式等。
4. **中断配置:**使能CAN控制器相关中断,如接收中断、错误中断等。
#### 3.1.2 CAN控制器配置
CAN控制器配置主要包括以下内容:
1. **过滤器配置:**设置CAN控制器接收消息的过滤器,以过滤掉不需要的消息。
2. **输出引脚配置:**配置CAN控制器的输出引脚,如TXD和RXD,以连接CAN收发器。
3. **接收缓冲区配置:**配置CAN控制器接收缓冲区的数量和大小,以存储接收到的消息。
4. **发送缓冲区配置:**配置CAN控制器发送缓冲区的数量和大小,以存储待发送的消息。
### 3.2 CAN消息发送和接收
#### 3.2.1 CAN消息发送
CAN消息发送主要包括以下步骤:
1. **数据准备:**准备要发送的数据,包括数据标识符和数据字节。
2. **发送请求:**向CAN控制器发送发送请求,将数据加载到发送缓冲区。
3. **等待发送完成:**等待CAN控制器完成数据发送,并检查发送状态。
#### 3.2.2 CAN消息接收

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《单片机C程序设计实训100例》专栏是一个全面且实用的单片机C语言编程学习资源。它提供了100个实战案例,涵盖了单片机编程的各个方面,包括基础、控制语句、函数、数组、指针、结构体、中断、定时器、串口通信、I/O端口操作、ADC和DAC、LCD显示、按键扫描、PWM控制、PID控制、Modbus通信、ZigBee通信、嵌入式操作系统和嵌入式应用开发。通过这些案例,学习者可以掌握单片机C语言的语法、概念和应用,并将其应用于实际项目中。专栏内容循序渐进,从基础知识到高级技术,适合不同水平的学习者。
专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【R语言极端值处理】:extRemes包进阶技术,成为数据分析高手

# 1. R语言在极端值处理中的应用概述
## 1.1 R语言简介
R语言是一种在统计分析领域广泛应用的编程语言。它不仅拥有强大的数据处理和分析能力,而且由于其开源的特性,社区支持丰富,不断有新的包和功能推出,满足不同研究和工作场景的需求。R语言在极端值处理中的应用尤为突出,因其提供了许多专门用于
【R语言统计推断】:ismev包在假设检验中的高级应用技巧

# 1. R语言与统计推断基础
## 1.1 R语言简介
R语言是一种用于统计分析、图形表示和报告的编程语言和软件环境。由于其强大的数据处理能力、灵活的图形系统以及开源性质,R语言被广泛应用于学术研究、数据分析和机器学习等领域。
## 1.2 统计推断基础
统计推断是统计学中根据样本数据推断总体特征的过程。它包括参数估计和假设检验两大主要分支。参数估计涉及对总体参数(如均值、方差等)的点估计或区间估计。而
R语言高级技巧大公开:定制化数据包操作流程速成
# 1. R语言基础回顾与高级数据结构
在这一章节,我们将对R语言的基础知识进行快速回顾,并深入探讨其高级数据结构。R语言以其强大的数据处理能力和灵活的统计分析功能,在数据科学领域获得了广泛的应用。我们将从基本的数据类型讲起,逐步深入到向量、矩阵、列表、数据框(DataFrame)以及R中的S3和S4对象系统。通过学习本章,读者将掌握如何使用这些高级数据结构来存储和管理复杂的数据集,
【R语言parma包案例分析】:经济学数据处理与分析,把握经济脉动
# 1. 经济学数据处理与分析的重要性
经济数据是现代经济学研究和实践的基石。准确和高效的数据处理不仅关系到经济模型的构建质量,而且直接影响到经济预测和决策的准确性。本章将概述为什么在经济学领域中,数据处理与分析至关重要,以及它们是如何帮助我们更好地理解复杂经济现象和趋势。
经济学数据处理涉及数据的采集、清洗、转换、整合和分析等一系列步骤,这不仅是为了保证数据质量,也是为了准备适合于特
【R语言时间序列预测大师】:利用evdbayes包制胜未来

# 1. R语言与时间序列分析基础
在数据分析的广阔天地中,时间序列分析是一个重要的分支,尤其是在经济学、金融学和气象学等领域中占据
【R语言编程实践手册】:evir包解决实际问题的有效策略

# 1. R语言与evir包概述
在现代数据分析领域,R语言作为一种高级统计和图形编程语言,广泛应用于各类数据挖掘和科学计算场景中。本章节旨在为读者提供R语言及其生态中一个专门用于极端值分析的包——evir——的基础知识。我们从R语言的简介开始,逐步深入到evir包的核心功能,并展望它在统计分析中的重要地位和应用潜力。
首先,我们将探讨R语言作为一种开源工具的优势,以及它如何在金融
【自定义数据包】:R语言创建自定义函数满足特定需求的终极指南

# 1. R语言基础与自定义函数简介
## 1.1 R语言概述
R语言是一种用于统计计算和图形表示的编程语言,它在数据挖掘和数据分析领域广受欢迎。作为一种开源工具,R具有庞大的社区支持和丰富的扩展包,使其能够轻松应对各种统计和机器学习任务。
## 1.2 自定义函数的重要性
在R语言中,函数是代码重用和模块化的基石。通过定义自定义函数,我们可以将重复的任务封装成可调用的代码
【R语言极值事件预测】:评估和预测极端事件的影响,evd包的全面指南

# 1. R语言极值事件预测概览
R语言,作为一门功能强大的统计分析语言,在极值事件预测领域展现出了其独特的魅力。极值事件,即那些在统计学上出现概率极低,但影响巨大的事件,是许多行业风险评估的核心。本章节,我们将对R语言在极值事件预测中的应用进行一个全面的概览。
首先,我们将探究极值事
TTR数据包在R中的实证分析:金融指标计算与解读的艺术

# 1. TTR数据包的介绍与安装
## 1.1 TTR数据包概述
TTR(Technical Trading Rules)是R语言中的一个强大的金融技术分析包,它提供了许多函数和方法用于分析金融市场数据。它主要包含对金融时间序列的处理和分析,可以用来计算各种技术指标,如移动平均、相对强弱指数(RSI)、布林带(Bollinger
R语言YieldCurve包优化教程:债券投资组合策略与风险管理
# 1. R语言YieldCurve包概览
## 1.1 R语言与YieldCurve包简介
R语言作为数据分析和统计计算的首选工具,以其强大的社区支持和丰富的包资源,为金融分析提供了强大的后盾。YieldCurve包专注于债券市场分析,它提供了一套丰富的工具来构建和分析收益率曲线,这对于投资者和分析师来说是不可或缺的。
## 1.2 YieldCurve包的安装与加载
在开始使用YieldCurve包之前,首先确保R环境已经配置好,接着使用`install.packages("YieldCurve")`命令安装包,安装完成后,使用`library(YieldCurve)`加载它。
``
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )