粒子滤波:复杂状态空间模型求解,3个应用场景解析
发布时间: 2024-07-02 05:55:12 阅读量: 5 订阅数: 13 
# 1. 粒子滤波理论基础**
粒子滤波是一种基于蒙特卡罗方法的贝叶斯滤波算法。它通过使用一组加权粒子来近似目标分布,从而实现对非线性、非高斯系统状态的估计。
粒子滤波的基本原理是:
* **状态估计:**使用一组粒子来表示目标状态分布。每个粒子代表一个可能的系统状态,其权重表示该状态的概率。
* **权重更新:**根据观测值更新粒子的权重,权重较高的粒子表示更可能的系统状态。
* **重采样:**根据粒子的权重进行重采样,以避免粒子退化。
# 2. 粒子滤波编程实践
### 2.1 粒子滤波算法实现
**代码块:**
```python
import numpy as np
import random
class ParticleFilter:
def __init__(self, num_particles, state_dim, obs_dim):
self.num_particles = num_particles
self.state_dim = state_dim
self.obs_dim = obs_dim
self.particles = np.random.rand(num_particles, state_dim)
self.weights = np.ones(num_particles) / num_particles
def predict(self, motion_model):
# 根据运动模型更新粒子状态
for i in range(self.num_particles):
self.particles[i] += motion_model(self.particles[i])
def update(self, obs, obs_model):
# 根据观测模型更新粒子权重
for i in range(self.num_particles):
self.weights[i] *= obs_model(obs, self.particles[i])
def resample(self):
# 重采样以保持多样性
new_particles = np.zeros((self.num_particles, self.state_dim))
for i in range(self.num_particles):
j = np.random.choice(self.num_particles, p=self.weights)
new_particles[i] = self.particles[j]
self.particles = new_particles
self.weights = np.ones(self.num_particles) / num_particles
```
**逻辑分析:**
该代码实现了粒子滤波算法的基本步骤:
* **初始化:**创建粒子群,并初始化粒子状态和权重。
* **预测:**根据运动模型更新粒子状态。
* **更新:**根据观测模型更新粒子权重。
* **重采样:**通过重采样保持粒子群的多样性。
**参数说明:**
* `num_particles`:粒子数量。
* `state_dim`:粒子状态维度。
* `obs_dim`:观测维度。
* `motion_model`:运动模型,用于更新粒子状态。
* `obs_model`:观测模型,用于更新粒子权重。
### 2.2 粒子滤波参数调优
**表格:**
| 参数 | 描述 | 影响 |
|---|---|---|
| 粒子数量 | 粒子群规模 | 稳定性、精度 |
| 重采样阈值 | 衡量粒子权重差异的阈值 | 多样性、精度 |
| 运动模型 | 粒子状态更新模型 | 跟踪精度 |
| 观测模型 | 粒子权重更新模型 | 跟踪精度 |
**优化方式:**
* **粒子数量:**根据实际问题复杂度调整,较复杂的问题需要更多粒子。
* **重采样阈值:**通常设置为 0.5 或 0.7,太高会导致过度重采样,太低会导致粒子退化。
* **运动模型:**选择与实际系统运动特性相匹配的模型。
* **观测模型:**选择与实际观测噪声分布相匹配的模型。
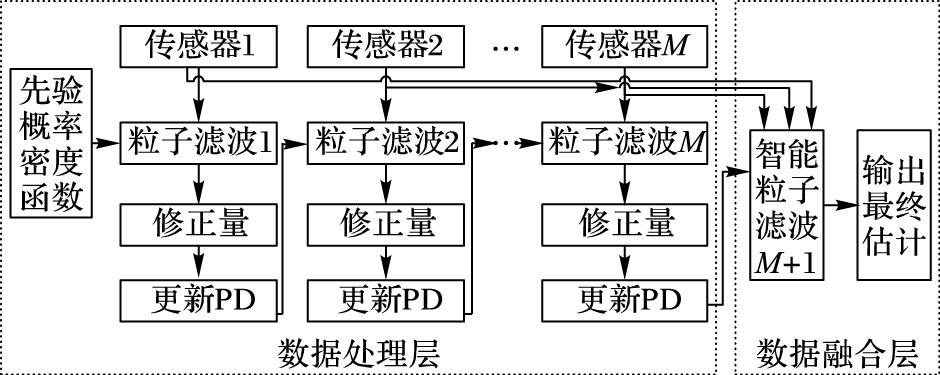
### 2.3 粒子滤波并行化
**流程图:**
```mermaid
sequenceDiagram
participant Particle 1
participant Particle 2
participant Particle 3
Particle 1->>+Particle 2: Send particle state
Particle 2->>+Particle 3: Send particle state
Particle 3->>+Particle 1: Send particle state
Particle 1->>+Particle 2: Update particle weights
Particle 2->>+Particle 3: Update particle weights
Particle 3->>+Particle 1: Update particle weights
```
**并行化策略:**
* 将粒子群划分为多个子群。
* 在每个子群上并行执行粒子滤波算法。
* 定期交换子群之间的粒子状态和权重。
**优势:**
* 提高计算效率,尤其是对于大规模粒子滤波问题。
* 减少粒子退化的风险,因为每个子群独立更新。
# 3. 粒子滤波在复杂场景中的应用
粒子滤波是一种强大的算法,在各种复杂场景中都有广泛的应用。本章将探讨粒子滤波在目标跟踪、机器人定位和异常检测中的应用,展示其在解决现实世界问题方面的有效性。
### 3.1 目标跟踪
粒子滤波在目标跟踪中发挥着至关重要的作用,因为它能够有效地估计目标在序列帧中的位置和状态。其基本思想是通过一组加权粒子来表示目标的概率分布,其中每个粒子代表目标可能的位姿。
#### 3.1.1 粒子滤波算法在目标跟踪中的实现
粒子滤波算法在目标跟踪中的实现通常遵循以下步骤:
- **初始化:**创建一组随机粒子,每个粒子表示目标的可能位置和状态。
- *
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
状态空间模型是一种强大的预测工具,广泛应用于各个领域。本专栏深入探讨了状态空间模型的各个方面,从基础概念到实际应用。我们揭示了 10 个关键应用,展示了如何使用状态空间模型预测动态系统。我们还介绍了 3 个核心概念,让您轻松掌握预测利器。
本专栏还提供了丰富的应用案例,涵盖时间序列分析、控制系统、经济学、机器学习、计算机视觉和信号处理。我们深入分析了状态空间模型的优缺点,帮助您全面评估预测利器。此外,我们还讨论了线性与非线性、时变与时不变、离散与连续等不同类型状态空间模型之间的差异,指导您选择适合的预测模型。
最后,我们介绍了 7 种求解方法和 5 种滤波算法,破解预测难题。通过本专栏,您将全面了解状态空间模型,并掌握预测动态系统的强大工具。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
单片机程序设计调试技巧:单元测试和集成测试,确保程序质量

# 1. 单片机程序设计调试基础**
单片机程序设计调试是嵌入式系统开发中至关重要的一环,它确保程序的正确性和可靠性。调试的基础知识包括:
- **调试目标:**识别和修复程序中的错误,确保其按预期运行。
- **调试工具:**示波器、逻辑分析仪、断点调试器等工具辅助调试过程。
- **调试方法:**包括硬件调试(检查电路和信号)和软件调试(分析代码和数据)。
# 2. 单元测试
单元测试是一
PMSM电机故障诊断中的机器学习应用:大数据赋能故障检测,提升电机维护效率

# 1. PMSM电机故障诊断概述**
PMSM(永磁同步电机)广泛应用于工业自动化、新能源汽车等领域,其可靠性至关重要。故障诊断是保障电机安全高效运行的关键技术,传统故障诊断方法存在效率低、准确率不高等问题。机器学习的引入为PMSM电机故障诊断带来了新的机遇和挑战。
本章将介绍PMSM电机故障诊断的基本概念,包括故障类型、故障机理和传统诊断方法的局限性。同时,还将阐述机器学习在
反余切函数拉普拉斯变换探索:函数时域和频域转换大公开,让你理解函数的奥秘
# 1. 反余切函数的时域分析
反余切函数,又称反正切函数,是余切函数的逆函数,记作 arctan(x)。其时域分析主要研究其在时域中的性质和规律。
### 1.1 反余切函数的定义和性质
反余切函数的定义域为实数集,值域为 (-π/2, π/2)。其图像对称于原点,具有奇函数的性质。反余切函数的导数为 1/(1 + x^2),表明其单调递增,且导数始终为正。
### 1.2 反余切函数的时域特性
反余切函数在时域中的主要特性包括:
- **单调性:** 反余切函数是单调递增的,即 x1 < x2 时,arctan(x1) < arctan(x2)。
- **对称性:** 反余切函
单片机程序设计项目管理指南:高效组织开发,保障项目成功
# 1. 单片机程序设计项目管理概述
单片机程序设计项目管理涉及使用系统化的方法来计划、执行、控制和完成单片机程序设计项目。它包括项目范围定义、需求分析、设计、实现、测试、交付和维护等阶段。
项目管理对于单片机程序设计项目至关重要,因为它有助于确保项目的按时、按预算和按质量完成。它还提供了一个框架,用于管理项目范围、控制风险并促进团队协作。
本章将概述单片机程序设计项目管理的基本概念,包括项目生命周期、项目管理
单片机C语言人工智能应用:10个揭秘单片机与人工智能的结合的实战案例

# 1. 单片机C语言与人工智能概述
### 1.1 单片机C语言概述
单片机C语言嵌入式系统调试技巧:快速定位并解决问题的9大秘诀
# 1. 单片机C语言嵌入式系统调试概述
单片机C语言嵌入式系统调试是嵌入式系统开发过程中至关重要的一环,它可以帮助开发者快速准确地定位和解决系统故障,从而提高开发效率和系统可靠性。
本篇教程将全面介绍单片机C语言嵌入式系统调试的原理、方法和技巧,帮助开发者掌握嵌入式系统调试的精髓,从而提升系统开发能力。
# 2. 单片机C语言嵌入式系统调试基础
### 2.1 调试工具和环境搭建
#### 2.1.1 常用的调试工具
单片机C语言嵌入式系统调试常用的工具包括:
- **仿真器:**连接到单片机并提供实时调试功能,如单步执行、断点设置和寄存器查看。
- **调试器:**通过串口或
BLDC电机控制系统中的故障容错控制:算法设计与系统评估,打造安全可靠的电机控制系统

# 1. BLDC电机控制系统简介
BLDC(无刷直流)电机是一种高效、可靠的电动机,广泛应用于各种工业和消费电子产品中。BLDC电机控制系统负责控制电机的速度、扭矩和方向,以满足特定的应用需求。
BLDC电机控制系统通常包括以下主要组件:
- **传感器:**检测电机转子位置和速度。
- **控制器:**根据传感器反馈和应用要求计算并输出控制信号。
- **功率电子器件:**
【单片机C语言进阶指南】:从零基础到实战应用的完整教程

# 1. 单片机C语言基础**
单片机C语言是嵌入式系统开发中广泛使用的高级编程语言。它基于标准C语言,并针对单片机系统的特点进行了扩展
三角波误差分析秘籍:识别和解决三角波处理中的误差,提升信号处理精度
# 1. 三角波误差的理论基础**
三角波误差是数字信号处理中一种常见的现象,它是由模拟信号数字化过程中产生的。当一个连续的
单片机PID控制原理与实现:精准控制的利器,提升系统响应能力
# 1. 单片机PID控制原理**
PID(比例-积分-微分)控制是一种广泛应用于工业自动化领域的经典控制算法。其原理是根据被控对象的误差信号,通过比例、积分和微分三个环节进行综合计算,从而输出一个控制信号,对被控对象进行调节。
**比例控制**:比例控制环节根据误差信号的当前值,产生一个与误差成正比的控制信号。比例系数越大,控制响应越快,但稳定性越差。
**积分控制**:积分控制环节根据误差信
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )