状态空间模型基础:3个核心概念,轻松掌握预测利器
发布时间: 2024-07-02 05:29:11 阅读量: 78 订阅数: 56 

# 1. 状态空间模型简介**
状态空间模型(SSM)是一种强大的预测工具,广泛应用于各种领域。它通过描述系统的内部状态和观测变量之间的关系,捕捉系统的动态行为。SSM由三个核心概念组成:
* **状态方程:**描述系统状态随时间变化的方程。它由系统矩阵、控制矩阵和系统噪声组成。
* **观测方程:**描述系统观测变量与系统状态之间的关系。它由观测矩阵和观测噪声组成。
* **系统噪声和观测噪声:**代表系统中不可预测的随机扰动。它们通常被假设为正态分布,具有特定的协方差矩阵。
# 2. 状态空间模型的核心概念
状态空间模型的核心概念包括状态方程、观测方程、系统噪声和观测噪声。
### 2.1 状态方程
状态方程描述了系统状态随时间的变化规律,其形式为:
```
x[k] = F[k-1] * x[k-1] + B[k-1] * u[k-1] + w[k-1]
```
其中:
- `x[k]`:时刻 `k` 的状态向量
- `F[k-1]`:状态转移矩阵
- `x[k-1]`:时刻 `k-1` 的状态向量
- `B[k-1]`:控制输入矩阵
- `u[k-1]`:时刻 `k-1` 的控制输入
- `w[k-1]`:时刻 `k-1` 的系统噪声
**2.1.1 状态方程的组成**
状态转移矩阵 `F[k-1]` 描述了状态在没有控制输入的情况下如何随时间变化。控制输入矩阵 `B[k-1]` 描述了控制输入如何影响状态的变化。
**2.1.2 状态方程的求解**
状态方程可以通过递推的方式求解:
```
x[k] = F[k-1] * x[k-1] + B[k-1] * u[k-1]
```
### 2.2 观测方程
观测方程描述了系统状态如何影响观测值,其形式为:
```
y[k] = H[k] * x[k] + v[k]
```
其中:
- `y[k]`:时刻 `k` 的观测值
- `H[k]`:观测矩阵
- `x[k]`:时刻 `k` 的状态向量
- `v[k]`:时刻 `k` 的观测噪声
**2.2.1 观测方程的组成**
观测矩阵 `H[k]` 描述了状态如何影响观测值。
**2.2.2 观测方程的求解**
观测方程可以通过以下公式求解:
```
y[k] = H[k] * x[k]
```
### 2.3 系统噪声和观测噪声
系统噪声和观测噪声是状态空间模型中两个重要的概念。
**2.3.1 系统噪声的性质**
系统噪声是系统状态变化中不可预测的部分,其性质如下:
- 均值为 0
- 协方差矩阵为 `Q[k-1]`
- 与状态和观测值无关
**2.3.2 观测噪声的性质**
观测噪声是观测值中不可预测的部分,其性质如下:
- 均值为 0
- 协方差矩阵为 `R[k]`
- 与状态和系统噪声无关
# 3. 状态空间模型的应用
状态空间模型在实际应用中有着广泛的应用场景,其中包括时序预测、系统控制和故障诊断。本章将详细介绍这些应用场景,并阐述如何利用状态空间模型解决实际问题。
#### 3.1 时序预测
时序预测是指根据历史数据对未来数据进行预测。状态空间模型通过对系统状态的估计和预测,可以实现对时序数据的有效预测。
**3.1.1 预测的原理**
状态空间模型的时序预测原理如下:
1. **状态估计:**根据观测数据估计系统当前时刻的状态。
2. **状态预测:**利用状态方程预测未来时刻的状态。
3. **观测预测:**利用观测方程预测未来时刻的观测数据。
**3.1.2 预测的步骤**
状态空间模型的时序预测步骤如下:
1. **建立状态空间模型:**根据问题实际情况建立系统状态方程和观测方程。
2. **估计模型参数:**利用历史数据估计模型中的未知参数。
3. **进行状态估计:**利用观测数据估计当前时刻的状态。
4. **进行状态预测:**利用状态方程预测未来时刻的状态。
5. **进行观测预测:**利用观测方程预测未来时刻的观测数据。
#### 3.2 系统控制
系统控制是指通过控制输入来调节系统输出,使其达到预期的目标。状态空间模型可以为系统控制提供理论基础,通过对系统状态的估计和预测,实现对系统的有效控制。
**3.2.1 控制的原理**
状态空间模型的系统控制原理如下:
1. **状态估计:**根据观测数据估计系统当前时刻的状态。
2. **控制律设计:**设计控制律,根据状态估计值计算控制输入。
3. **控制输入:**将控制输入作用于系统,调节系统输出。
**3.2.2 控制的步骤**
状态空间模型的系统控制步骤如下:
1. **建立状态空间模型:**根据问题实际情况建立系统状态方程和观测方程。
2. **估计模型参数:**利用历史数据估计模型中的未知参数。
3. **进行状态估计:**利用观测数据估计当前时刻的状态。
4. **设计控制律:**根据状态估计值设计控制律。
5. **实施控制:**将控制输入作用于系统,调节系统输出。
#### 3.3 故障诊断
故障诊断是指通过观测数据检测和识别系统中的故障。状态空间模型可以利用系统状态的估计和预测,实现对系统故障的有效诊断。
**3.3.1 故障诊断的原理**
状态空间模型的故障诊断原理如下:
1. **状态估计:**根据观测数据估计系统当前时刻的状态。
2. **故障检测:**将状态估计值与正常状态进行比较,检测是否存在故障。
3. **故障识别:**分析故障检测结果,识别故障类型和位置。
**3.3.2 故障诊断的步骤**
状态空间模型的故障诊断步骤如下:
1. **建立状态空间模型:**根据问题实际情况建立系统状态方程和观测方程。
2. **估计模型参数:**利用历史数据估计模型中的未知参数。
3. **进行状态估计:**利用观测数据估计当前时刻的状态。
4. **进行故障检测:**将状态估计值与正常状态进行比较,检测是否存在故障。
5. **进行故障识别:**分析故障检测结果,识别故障类型和位置。
# 4. 状态空间模型的扩展
### 4.1 非线性状态空间模型
#### 4.1.1 非线性状态空间模型的特征
非线性状态空间模型是指状态方程或观测方程为非线性的状态空间模型。与线性状态空间模型相比,非线性状态空间模型具有以下特征:
- **非线性关系:**状态方程或观测方程中包含非线性函数,例如指数函数、对数函数或三角函数。
- **求解难度:**由于非线性关系的存在,非线性状态空间模型的求解通常比线性状态空间模型更困难。
- **局部最优解:**非线性优化算法可能会收敛到局部最优解,而不是全局最优解。
#### 4.1.2 非线性状态空间模型的求解
求解非线性状态空间模型可以使用以下方法:
- **扩展卡尔曼滤波(EKF):**一种近似方法,通过线性化非线性方程来估计状态。
- **无迹卡尔曼滤波(UKF):**一种基于无迹变换的近似方法,可以处理更复杂的非线性关系。
- **粒子滤波(PF):**一种蒙特卡罗方法,通过模拟粒子云来估计状态。
### 4.2 多变量状态空间模型
#### 4.2.1 多变量状态空间模型的组成
多变量状态空间模型是指状态向量和观测向量具有多个分量的状态空间模型。与单变量状态空间模型相比,多变量状态空间模型具有以下组成:
- **多维状态向量:**状态向量包含多个状态变量,表示系统的内部状态。
- **多维观测向量:**观测向量包含多个观测变量,表示系统的输出。
- **多维系统噪声和观测噪声:**系统噪声和观测噪声也是多维的,表示系统和观测过程中的不确定性。
#### 4.2.2 多变量状态空间模型的求解
求解多变量状态空间模型可以使用以下方法:
- **卡尔曼滤波:**一种递归算法,用于估计多变量状态空间模型的状态和协方差矩阵。
- **信息滤波:**一种基于信息矩阵的算法,可以处理大规模多变量状态空间模型。
- **平方根滤波:**一种基于平方根协方差矩阵的算法,可以提高计算效率。
### 4.3 混合状态空间模型
#### 4.3.1 混合状态空间模型的特征
混合状态空间模型是指状态方程或观测方程包含离散和连续分量的状态空间模型。与离散状态空间模型和连续状态空间模型相比,混合状态空间模型具有以下特征:
- **混合动力学:**系统动力学由离散和连续过程混合组成。
- **状态转移:**状态转移可以是离散的(跳变)或连续的(平滑)。
- **观测:**观测可以是离散的(事件)或连续的(测量)。
#### 4.3.2 混合状态空间模型的求解
求解混合状态空间模型可以使用以下方法:
- **混合卡尔曼滤波(HKF):**一种混合了卡尔曼滤波和马尔可夫链蒙特卡罗(MCMC)方法的算法。
- **粒子混合滤波(PHF):**一种基于粒子滤波的算法,可以处理更复杂的混合动力学。
- **蒙特卡罗模拟(MCS):**一种基于随机模拟的算法,可以处理大规模混合状态空间模型。
# 5. 状态空间模型的实践
### 5.1 Python实现状态空间模型
#### 5.1.1 Python库介绍
在Python中,实现状态空间模型可以使用statsmodels库。该库提供了丰富的状态空间模型类和方法,可以方便地构建、拟合和预测状态空间模型。
#### 5.1.2 状态空间模型的实现步骤
使用statsmodels库实现状态空间模型的一般步骤如下:
1. **导入statsmodels库**
```python
import statsmodels.api as sm
```
2. **创建状态空间模型**
使用`sm.tsa.statespace.MLEModel`类创建状态空间模型。该类需要指定状态方程和观测方程的系数矩阵。
```python
# 定义状态方程系数矩阵
A = np.array([[1, 0.5], [0, 1]])
# 定义观测方程系数矩阵
C = np.array([[1, 0]])
# 创建状态空间模型
model = sm.tsa.statespace.MLEModel(endog, exog=None, k_states=2, obs_intercept=0, obs_cov_type='diag')
```
3. **拟合状态空间模型**
使用`fit`方法拟合状态空间模型。该方法需要指定优化方法和优化参数。
```python
# 拟合状态空间模型
results = model.fit(method='powell', maxiter=100)
```
4. **预测状态空间模型**
使用`predict`方法预测状态空间模型。该方法需要指定预测的步长。
```python
# 预测状态空间模型
predictions = results.predict(steps=10)
```
### 5.2 R实现状态空间模型
#### 5.2.1 R库介绍
在R中,实现状态空间模型可以使用dplyr库。该库提供了丰富的状态空间模型类和方法,可以方便地构建、拟合和预测状态空间模型。
#### 5.2.2 状态空间模型的实现步骤
使用dplyr库实现状态空间模型的一般步骤如下:
1. **导入dplyr库**
```r
library(dplyr)
```
2. **创建状态空间模型**
使用`ssm`函数创建状态空间模型。该函数需要指定状态方程和观测方程的系数矩阵。
```r
# 定义状态方程系数矩阵
A <- matrix(c(1, 0.5, 0, 1), ncol=2)
# 定义观测方程系数矩阵
C <- matrix(c(1, 0), ncol=2)
# 创建状态空间模型
model <- ssm(y ~ A %*% x + C %*% z, x ~ 1 + z, data = data)
```
3. **拟合状态空间模型**
使用`fit`函数拟合状态空间模型。该函数需要指定优化方法和优化参数。
```r
# 拟合状态空间模型
fit <- fit(model, method = 'powell', maxiter = 100)
```
4. **预测状态空间模型**
使用`predict`函数预测状态空间模型。该函数需要指定预测的步长。
```r
# 预测状态空间模型
predictions <- predict(fit, nsteps = 10)
```
# 6. 状态空间模型的应用案例
状态空间模型在实际应用中有着广泛的应用场景,下面介绍两个典型的应用案例:股票价格预测和工业过程控制。
### 6.1 股票价格预测
#### 6.1.1 股票价格预测的模型建立
股票价格预测是一个经典的状态空间模型应用案例。我们可以使用状态空间模型来捕捉股票价格随时间变化的动态特征。
假设股票价格 $P_t$ 遵循以下状态空间模型:
```
状态方程:
$X_t = AX_{t-1} + B\varepsilon_t$
观测方程:
$Y_t = CX_t + D\eta_t$
```
其中,$X_t$ 是状态变量,表示股票价格的潜在趋势;$Y_t$ 是观测变量,表示实际观测到的股票价格;$A$、$B$、$C$、$D$ 是系统矩阵和噪声协方差矩阵;$\varepsilon_t$ 和 $\eta_t$ 是系统噪声和观测噪声,服从正态分布。
我们可以使用历史股票价格数据来估计模型参数。例如,我们可以使用卡尔曼滤波器来估计状态变量 $X_t$,并根据状态变量预测未来的股票价格。
#### 6.1.2 股票价格预测的评估
为了评估股票价格预测模型的性能,我们可以使用以下指标:
* **均方根误差 (RMSE)**:衡量预测值与实际值之间的误差。
* **平均绝对误差 (MAE)**:衡量预测值与实际值之间的绝对误差。
* **相关系数 (R)**:衡量预测值与实际值之间的相关性。
通过这些指标,我们可以评估模型的预测精度和可靠性。
### 6.2 工业过程控制
#### 6.2.1 工业过程控制的模型建立
工业过程控制是另一个重要的状态空间模型应用领域。我们可以使用状态空间模型来描述工业过程的动态行为,并设计控制策略来优化过程性能。
假设一个工业过程的输入为 $u_t$,输出为 $y_t$,我们可以使用以下状态空间模型来描述过程:
```
状态方程:
$X_t = AX_{t-1} + Bu_t + \varepsilon_t$
观测方程:
$Y_t = CX_t + \eta_t$
```
其中,$X_t$ 是状态变量,表示过程的内部状态;$u_t$ 是控制输入;$y_t$ 是观测输出;$A$、$B$、$C$ 是系统矩阵和噪声协方差矩阵;$\varepsilon_t$ 和 $\eta_t$ 是系统噪声和观测噪声,服从正态分布。
我们可以使用状态空间模型来设计最优控制策略,以最小化过程的误差或优化过程的性能。例如,我们可以使用线性二次调节器 (LQR) 来设计控制策略。
#### 6.2.2 工业过程控制的评估
为了评估工业过程控制模型的性能,我们可以使用以下指标:
* **误差平方和 (SSE)**:衡量控制策略下过程误差的总和。
* **积分时间绝对误差 (ITAE)**:衡量控制策略下过程误差的积分绝对值。
* **积分时间平方误差 (ITSE)**:衡量控制策略下过程误差的积分平方值。
通过这些指标,我们可以评估控制策略的有效性和鲁棒性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
状态空间模型是一种强大的预测工具,广泛应用于各个领域。本专栏深入探讨了状态空间模型的各个方面,从基础概念到实际应用。我们揭示了 10 个关键应用,展示了如何使用状态空间模型预测动态系统。我们还介绍了 3 个核心概念,让您轻松掌握预测利器。
本专栏还提供了丰富的应用案例,涵盖时间序列分析、控制系统、经济学、机器学习、计算机视觉和信号处理。我们深入分析了状态空间模型的优缺点,帮助您全面评估预测利器。此外,我们还讨论了线性与非线性、时变与时不变、离散与连续等不同类型状态空间模型之间的差异,指导您选择适合的预测模型。
最后,我们介绍了 7 种求解方法和 5 种滤波算法,破解预测难题。通过本专栏,您将全面了解状态空间模型,并掌握预测动态系统的强大工具。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
极端事件预测:如何构建有效的预测区间
# 1. 极端事件预测概述
极端事件预测是风险管理、城市规划、保险业、金融市场等领域不可或缺的技术。这些事件通常具有突发性和破坏性,例如自然灾害、金融市场崩盘或恐怖袭击等。准确预测这类事件不仅可挽救生命、保护财产,而且对于制定应对策略和减少损失至关重要。因此,研究人员和专业人士持
【实时系统空间效率】:确保即时响应的内存管理技巧

# 1. 实时系统的内存管理概念
在现代的计算技术中,实时系统凭借其对时间敏感性的要求和对确定性的追求,成为了不可或缺的一部分。实时系统在各个领域中发挥着巨大作用,比如航空航天、医疗设备、工业自动化等。实时系统要求事件的处理能够在确定的时间内完成,这就对系统的设计、实现和资源管理提出了独特的挑战,其中最为核心的是内存管理。
内存管理是操作系统的一个基本组成部
时间序列分析的置信度应用:预测未来的秘密武器
# 1. 时间序列分析的理论基础
在数据科学和统计学中,时间序列分析是研究按照时间顺序排列的数据点集合的过程。通过对时间序列数据的分析,我们可以提取出有价值的信息,揭示数据随时间变化的规律,从而为预测未来趋势和做出决策提供依据。
## 时间序列的定义
时间序列(Time Series)是一个按照时间顺序排列的观测值序列。这些观测值通常是一个变量在连续时间点的测量结果,可以是每秒的温度记录,每日的股票价
机器学习性能评估:时间复杂度在模型训练与预测中的重要性
# 1. 机器学习性能评估概述
## 1.1 机器学习的性能评估重要性
机器学习的性能评估是验证模型效果的关键步骤。它不仅帮助我们了解模型在未知数据上的表现,而且对于模型的优化和改进也至关重要。准确的评估可以确保模型的泛化能力,避免过拟合或欠拟合的问题。
## 1.2 性能评估指标的选择
选择正确的性能评估指标对于不同类型的机器学习任务至关重要。例如,在分类任务中常用的指标有
学习率对RNN训练的特殊考虑:循环网络的优化策略
# 1. 循环神经网络(RNN)基础
## 循环神经网络简介
循环神经网络(RNN)是深度学习领域中处理序列数据的模型之一。由于其内部循环结
Epochs调优的自动化方法
# 1. Epochs在机器学习中的重要性
机器学习是一门通过算法来让计算机系统从数据中学习并进行预测和决策的科学。在这一过程中,模型训练是核心步骤之一,而Epochs(迭代周期)是决定模型训练效率和效果的关键参数。理解Epochs的重要性,对于开发高效、准确的机器学习模型至关重要。
在后续章节中,我们将深入探讨Epochs的概念、如何选择合适值以及影响调优的因素,以及如何通过自动化方法和工具来优化Epochs的设置,从而
激活函数理论与实践:从入门到高阶应用的全面教程

# 1. 激活函数的基本概念
在神经网络中,激活函数扮演了至关重要的角色,它们是赋予网络学习能力的关键元素。本章将介绍激活函数的基础知识,为后续章节中对具体激活函数的探讨和应用打下坚实的基础。
## 1.1 激活函数的定义
激活函数是神经网络中用于决定神经元是否被激活的数学函数。通过激活函数,神经网络可以捕捉到输入数据的非线性特征。在多层网络结构
【算法竞赛中的复杂度控制】:在有限时间内求解的秘籍
# 1. 算法竞赛中的时间与空间复杂度基础
## 1.1 理解算法的性能指标
在算法竞赛中,时间复杂度和空间复杂度是衡量算法性能的两个基本指标。时间复杂度描述了算法运行时间随输入规模增长的趋势,而空间复杂度则反映了算法执行过程中所需的存储空间大小。理解这两个概念对优化算法性能至关重要。
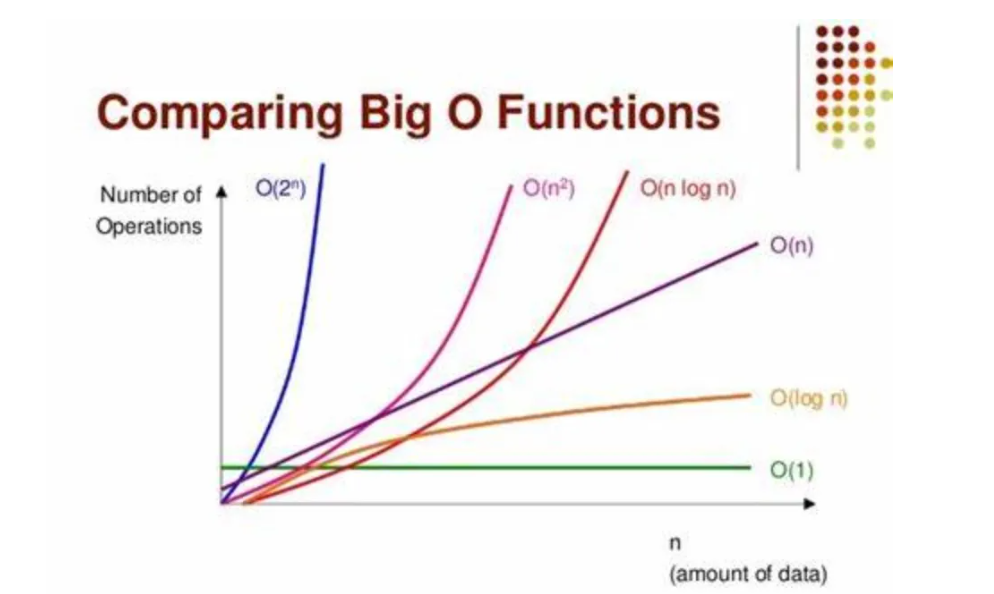
## 1.2 大O表示法的含义与应用
大O表示法是用于描述算法时间复杂度的一种方式。它关注的是算法运行时
【损失函数与随机梯度下降】:探索学习率对损失函数的影响,实现高效模型训练

# 1. 损失函数与随机梯度下降基础
在机器学习中,损失函数和随机梯度下降(SGD)是核心概念,它们共同决定着模型的训练过程和效果。本
【批量大小与存储引擎】:不同数据库引擎下的优化考量

# 1. 数据库批量操作的理论基础
数据库是现代信息系统的核心组件,而批量操作作为提升数据库性能的重要手段,对于IT专业人员来说是不可或缺的技能。理解批量操作的理论基础,有助于我们更好地掌握其实践应用,并优化性能。
## 1.1 批量操作的定义和重要性
批量操作是指在数据库管理中,一次性执行多个数据操作命
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )