fmincon Nonlinear Constrained Optimization Tips: A Powerful Tool for Handling Complex Constraints
发布时间: 2024-09-14 11:37:59 阅读量: 33 订阅数: 36 

Algorithm-Nonlinear-Optimization-Algorithms.zip
# Introduction to fmincon for Nonlinear Constrained Optimization: A Powerful Tool for Handling Complex Constraints
fmincon is a robust function in MATLAB designed to tackle nonlinear constraint optimization problems. It empowers users to define objective functions, constraints, and optimization parameters to solve intricate optimization challenges. Utilizing a sequential quadratic programming algorithm, fmincon iteratively locates the minimum of the objective function within the constraints' boundaries.
Unlike unconstrained optimization, nonlinear constraint optimization involves conditions that must be satisfied. fmincon supports various constraint types, including linear, nonlinear, and boundary constraints. By specifying these constraints, users can confine the problem within a feasible solution space.
# 2. fmincon Optimization Algorithm and Parameter Settings
### 2.1 Overview of the Optimization Algorithm
fmincon is a powerful function in MATLAB for solving nonlinear constraint optimization problems. It employs an interior-point method, an iterative algorithm that approximates the optimal solution by solving a series of subproblems. The interior-point method handles constraints by iterating within the feasible domain, ensuring that the constraints are satisfied.
### 2.2 Constraint Handling Methods
fmincon supports various constraint types, including linear, nonlinear, and boundary constraints. For linear constraints, it uses linear programming techniques, while for nonlinear constraints, it adopts nonlinear programming techniques.
### 2.3 Tips for Parameter Configuration
The parameter configuration in fmincon is crucial for optimization performance. Key parameters include:
- **Algorithm:** Specifies the optimization algorithm, such as the interior-point method or sequential quadratic programming.
- **Display:** Controls the display level of the optimization process.
- **FunctionTolerance:** Tolerance for the optimization function value.
- **MaxFunEvals:** Maximum number of function evaluations.
- **MaxIter:** Maximum number of iterations.
It is recommended to start with default parameters and adjust them as needed to improve performance.
**Example Code:**
```matlab
% Define the optimization function
fun = @(x) x(1)^2 + x(2)^2;
% Define linear constraints
A = [1, 1; -1, 1];
b = [2; 1];
% Define boundary constraints
lb = [0; 0];
ub = [1; 1];
% Set optimization parameters
options = optimoptions('fmincon', 'Algorithm', 'interior-point', ...
'Display', 'iter', 'FunctionTolerance', 1e-6, 'MaxFunEvals', 1000, 'MaxIter', 100);
% Solve the optimization problem
[x, fval] = fmincon(fun, [0.5; 0.5], A, b, [], [], lb, ub, [], options);
% Print the optimization results
disp(['Optimal solution: ', num2str(x)]);
disp(['Optimal value: ', num2str(fval)]);
```
**Code Logic Analysis:**
* `fun` defines the optimization function, aiming to solve for the sum of squares of x1 and x2.
* `A` and `b` define the linear constraints, namely x1 + x2 ≤ 2 and -x1 + x2 ≤ 1.
* `lb` and `ub` define the boundary constraints, meaning x1 and x2 are within the range [0, 1].
* `options` set the optimization parameters, including the algorithm, display level, tolerance, and maximum number of iterations.
* `fmincon` solves the optimization problem, returning the optimal solution `x` and optimal value `fval`.
# 3.1 Linear Constraints
**Linear constraints** are the most common type of constraints in fmincon, taking the form:
```
A * x <= b
```
Where:
* A is an m x n matrix, with m representing the number of constraints and n the number of variables.
* x is an n x 1 vector of variables.
* b is an m x 1 vector of constants.
**Code Block:**
```matlab
% Define linear constraints
A = [1, 2; -1, 1];
b = [4; 2];
% Set optimization options
options = optimset('Algorithm', 'interior-point');
% Solve the optimization problem
[x, fval] = fmincon(@(x) x(1)^2 + x(2)^2, [0; 0], A, b, [], [], [], [], [], options);
```
**Logic Analysis:**
* `A` and `b` define two linear constraints: `x(1) + 2x(2) <= 4` and `-x(1) + x(2) <= 2`.
* The `optimset` function sets the optimization algorithm to the interior-point method.
* The `fmincon` function solves the optimization problem, where the objective function is `x(1)^2 + x(2)^2`.
### 3.2 Nonlinear Constraints
**Nonlinear constraints** are more complex, taking the form:
```
c(x) <= 0
```
Where:
* c(x) is a nonlinear function representing the constraint condition.
**Code Block:**
```matlab
% Define nonlinear constraints
c = @(x) x(1)^2 + x(2)^2 - 1;
% Set optimization options
options = optimset('Algorithm', 'sqp');
% Solve the optimization problem
[x, fval] = fmincon(@(x) x(1)^2 + x(2)^2, [0; 0], [], [], [], [], [], [], c, options);
```
**Logic Analysis:**
* The `c` function defines the nonlinear constraint: `x(1)^2 + x

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
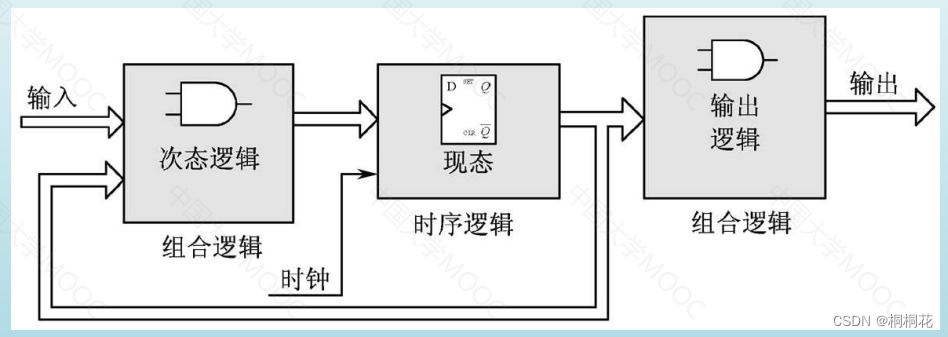
【状态机深度解析】:在Verilog中如何设计高效自动售货机
# 摘要
本文系统地探讨了状态机的设计与应用,首先介绍了状态机设计的基础知识,并详细阐述了在Verilog中实现状态机的设计原则,包括状态的分类、建模方法、状态编码及转换表的设计。接着,针对自动售货机的场景,本文详细描述了状态机的设计实现过程,包括用户界面交互、商品选择、货币处理和状态转换逻辑编写等。此外,还探讨了状态机的设计验证与测试,包括测试环境构建、仿真测试、调试和硬件实现验证。最后,本文提出了状态机优化的方法,并讨论了状态机在其他领域中的应
【MATLAB高级索引攻略】:解锁数据处理的隐藏技能
# 摘要
MATLAB作为一种高效的数据处理工具,其高级索引技术在数据科学领域发挥着重要作用。本文首先概述了MATLAB高级索引的基本概念与作用,随后深入探讨了索引操作的数学原理及数据结构。进一步,文章详细介绍了MATLAB高级索引实践技巧,包括复杂条件下的索引应用和高效数据提取与处理方法。在数据处理应用方面,本文阐述了处理大型数据集的索引策略、多维数据的可视化索引技术,以及M
C语言高级编程:子程序参数传递的全面解析
# 摘要
本文深入探讨了C语言中子程序参数传递的机制及其优化技术,首先概述了参数传递的基础知识,随后详细分析了按值传递和按引用传递的优缺点,以及在实现机制中的具体应用,包括内存中的参数布局、指针的作用和复合数据类型的传递。文章进一步探讨了高级参数传递技术,如指针的指针、const修饰符的使用以及可变参数列表的处理,并通过实践案例和最佳实践,讨论了在实际项目中应用这些技术的策略和技巧。本文旨在为C语言开发者提供系
【故障无忧】:西门子SINUMERIK 840D sl_828D测量循环问题全解析及解决之道

# 摘要
本文对西门子数控系统的核心组件SINUMERIK 840D sl/828D的测量循环功能进行了详尽的探讨。文章首先概述了测量循环的基本概念及其在制造业中的应用价值,然后详细介绍了测量循环的操作流程、编程指令以及高级应用技巧。通过故障分析章节,本文分类并识别了测量循环中常见的硬件和软件故障,提供了故障案例分析以及预防和监控策略。进一步地
数字签名机制全解析:RSA和ECDSA的工作原理及应用

# 摘要
本文全面概述了数字签名机制,详细介绍了公钥加密的理论基础,包括对称与非对称加密的原理和局限性、大数分解及椭圆曲线数学原理。通过深入探讨RSA和ECDSA算法的工作原理,本文揭示了两种算法在密钥生成、加密解密、签名验证等方面的运作机制,并分析了它们相对于传统加密方式
【CAD2002高级技巧】
# 摘要
本文对CAD2002软件进行全面的介绍和分析,从软件概述、界面布局、基础操作深入剖析,到绘图与编辑技巧实战,再到高级功能拓展以及优化与故障排除。文章详细阐述了CAD2002的工具与命令高级使用技巧、图层管理、块与外部参照应用等基础操作,深入探讨了精确绘图、高级编辑命令和综合绘图案例。此外,还介绍了CAD2002的参数化绘图、数据交换、自定义脚本编写等高级功能,以及性
Word 2016 Endnotes加载项疑难杂症:专家级解决方案
# 摘要
本文详细介绍了Word 2016中Endnotes功能的概述、工作原理、常见问题诊断以及应用实践,并展望了其发展。首先,对Endnotes功能进行了基础性的介绍,并探讨了其加载项的结构和作用。接着,分析了在使用Endnotes加载项时可能遇到的问题,包括不工作、冲突以及性能问题,并提
【搜索引擎查询优化】:提速与相关性提升的双重攻略

# 摘要
本文旨在综述搜索引擎查询优化的各个方面,从搜索引擎的工作原理、查询优化策略到实践案例分析,再到未来趋势。首先介绍了搜索引擎的基础工作流程,包括爬虫抓取、索引构建、查询处理和排名算法。随后,探讨了提升网页相关性、前端性能优化以及CDN和缓存机制的使用。案例分析部分深入研究了相关性改进、响应时间加
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )