MATLAB Constrained Optimization: A Dual Strategy of Algorithms and Practices
发布时间: 2024-09-14 20:44:10 阅读量: 10 订阅数: 18 
# 1. Overview of MATLAB Constrained Optimization
In the fields of engineering and scientific research, finding the optimal solution is crucial. MATLAB, as a powerful mathematical computing and engineering simulation software, provides strong support for solving these problems through its constrained optimization toolbox. In this chapter, we will delve into the concept of constrained optimization, understand its importance, and outline how MATLAB plays a role in this field.
Firstly, constrained optimization refers to the process of finding the optimal value of a target function within given constraints. These constraints can be equations or inequalities, limiting the feasible range of decision variables. For example, when designing a bridge, engineers need to minimize the material and construction costs while ensuring the load-bearing capacity and safety standards are met.
Next, we will explore the constrained optimization toolbox in MATLAB, which offers a range of functions and algorithms for solving various complex optimization problems. We will introduce the installation, configuration, and key function usage of the optimization toolbox, laying a solid foundation for subsequent chapters. With these tools, we can effectively apply theoretical knowledge to practical problems and solve real-world optimization challenges.
In summary, the MATLAB constrained optimization toolbox not only supports theoretical research but also provides efficient tools for problem-solving in engineering practice. This chapter lays the groundwork for our in-depth understanding and application of these tools.
# 2. Theoretical Foundations of Constrained Optimization in MATLAB
## 2.1 Basic Concepts of Optimization Problems
### 2.1.1 Introduction to Unconstrained Optimization Problems
An unconstrained optimization problem is one where there are no constraints and the goal is to find the minimum or maximum value of a function. In mathematical terms, this involves finding a point x* in the function f(x)'s domain such that f(x*) is minimized (or maximized). Unconstrained optimization is the basis for all optimization problems and is often used as the first step in solving real-world problems or as a simplification model.
In MATLAB, we commonly use the `fminunc` function to solve unconstrained optimization problems. This function uses methods such as Newton's method, quasi-Newton methods, or gradient descent to iteratively solve the problem. The process of solving an unconstrained optimization problem typically includes selecting an initial point and then computing new iteration points using iterative formulas until the convergence conditions are met.
### 2.1.2 Classification and Characteristics of Constrained Optimization Problems
Constrained optimization problems are those that find the optimal solution under certain constraints, which are more realistic. Constrained optimization problems can be further divided into equality constrained optimization and inequality constrained optimization. Equality constraints are typically the boundaries of a function's domain, while inequality constraints define the internal boundaries of the feasible solution area.
Characteristics of constrained optimization problems include, but are not limited to, the following points:
- Multi-objectivity: In real-world applications, it is often necessary to optimize multiple objectives simultaneously, leading to multi-objective constrained optimization problems.
- Nonlinearity: The constraint conditions and the target function may include both linear and nonlinear terms, increasing the complexity of the solution.
- Uncertainty: The introduction of constraint conditions increases the uncertainty of the problem, which may affect the convergence and efficiency of the algorithm.
- Diversity: In different application fields, the form and solution strategies of constrained optimization problems may vary greatly.
In MATLAB, constrained optimization problems can be solved using the `fmincon` function, which supports linear and nonlinear constraints and can handle both linear and nonlinear target functions. Solving such problems involves more complex algorithms, such as the Sequential Quadratic Programming (SQP) algorithm.
## 2.2 Mathematical Models in Constrained Optimization
### 2.2.1 Linear Constraints and Nonlinear Constraints
In linear constraints, all constraint conditions are linear inequalities or equalities. For example, a typical linear programming problem can be expressed as:
\[ \text{minimize} \quad c^Tx \]
\[ \text{subject to} \quad A_{ineq}x \leq b_{ineq}, \quad A_{eq}x = b_{eq} \]
where \( c \) is the coefficient of the objective function, \( A_{ineq} \) and \( b_{ineq} \) define the inequality constraints, and \( A_{eq} \) and \( b_{eq} \) define the equality constraints.
Nonlinear constraints include nonlinear equalities or inequalities, which can be expressed as follows:
\[ \text{minimize} \quad f(x) \]
\[ \text{subject to} \quad c(x) \leq 0, \quad ceq(x) = 0 \]
Here, \( f(x) \) is the target function, \( c(x) \) and \( ceq(x) \) are the inequality and equality constraint functions, respectively, and are nonlinear functions of the variable \( x \).
### 2.2.2 Properties of the Objective Function
The properties of the objective function are crucial for selecting the appropriate optimization algorithm. The properties of the objective function mainly include the following points:
- Convexity: If the objective function is convex, then the local minimum value is also the global minimum, making the problem easier to solve.
- Continuity and differentiability: Continuous and differentiable objective functions allow the use of gradient-based optimization algorithms, such as gradient descent.
- Smoothness: If a function has continuous first and second derivatives within its domain, it is called a smooth function.
- Singularity: Local extreme points of the target function may be difficult to find, especially when there are singular points.
The MATLAB optimization toolbox provides various functions to help assess and select the appropriate optimization method. For example, `islocalmin` can be used to check whether a function value is a local minimum.
## 2.3 Principles of Constrained Optimization Algorithms
### 2.3.1 Lagrange Multiplier Method
The Lagrange multiplier method is a method for finding the extreme values of a multivariate function under a set of constraints. This method introduces Lagrange multipliers (also known as Lagrangian multipliers), constructs a Lagrange function, and finds the extreme values of the original problem by solving for the stationary points of the Lagrange function.
Suppose the original optimization problem is:
\[ \text{minimize} \quad f(x) \]
\[ \text{subject to} \quad c_i(x) \leq 0, \quad i=1,...,m \]
\[ \quad \quad \quad d_j(x) = 0, \quad j=1,...,p \]
By introducing Lagrange multipliers, a Lagrange function can be constructed:
\[ L(x, \lambda, \mu) = f(x) + \sum_{i=1}^{m} \lambda_i c_i(x) + \sum_{j=1}^{p} \mu_j d_j(x) \]
where \( \lambda \) and \( \mu \) are the Lagrange multipliers for the inequality and equality constraints, respectively. The problem of finding the extreme values becomes solving for the stationary points of \( L(x, \lambda, \mu) \).
### 2.3.2 Detailed Explanation of KKT Conditions
The KKT (Karush-Kuhn-Tucker) conditions are a set of necessary conditions for solving constrained optimization problems, and are an extension of the Lagrange multiplier method. For optimization problems with both equality and inequality constraints, the KKT conditions include the following four parts:
- Stationarity condition: The first-order partial derivatives of the Lagrange function with respect to the optimization variables are zero.
- Primal feasibility condition: All equality constraints must be satisfied.
- Dual feasibility condition: All Lagrange multipliers for inequality constraints must be non-negative.
- Complementary slackness condition: For each inequality constraint, either the constraint condition \( c_i(x) = 0 \) or the corresponding Lagrange multiplier \( \lambda_i = 0 \).
In MATLAB, KKT conditions can be used to verify the solution to constrained optimization problems and can also serve as the basis for algorithm design. When solving constrained optimization problems, MATLAB's optimization toolbox attempts to find solutions that satisfy the KKT conditions.
### 2.3.3 Convergence and Complexity Analysis of Algorithms
When choosing and designing constrained optimization algorithms, the convergence of the algorithm is an important consideration. Ideally, an optimization algorithm should guarantee convergence to the optimal solution of the problem or at least to an approximate solution within a finite number of steps. However, in practical applications, the performance of an algorithm is not only dependent on its theoretical convergence but also affected by factors such as the choice of the initial point, the nature of the constraint conditions, ***
***plexity analysis focuses on the amount of computation performed at each step of the algorithm, ***plexity can be used to evaluate the feasibility of an algorithm for large-scale problems. For example, gradient descent requires one calculation of the gradient of the objective function per step, while Newton's method requires the calculation of the second derivative matrix of the objective function (Hessian matrix) and its inverse. Therefore, Newton's method typically has a higher computational cost per iteration than gradient descent.
In MATLAB, different optimization
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Parallelization Techniques for Matlab Autocorrelation Function: Enhancing Efficiency in Big Data Analysis
# 1. Introduction to Matlab Autocorrelation Function
The autocorrelation function is a vital analytical tool in time-domain signal processing, capable of measuring the similarity of a signal with itself at varying time lags. In Matlab, the autocorrelation function can be calculated using the `xcorr
Python pip性能提升之道
# 1. Python pip工具概述
Python开发者几乎每天都会与pip打交道,它是Python包的安装和管理工具,使得安装第三方库变得像“pip install 包名”一样简单。本章将带你进入pip的世界,从其功能特性到安装方法,再到对常见问题的解答,我们一步步深入了解这一Python生态系统中不可或缺的工具。
首先,pip是一个全称“Pip Installs Pac
Python序列化与反序列化高级技巧:精通pickle模块用法

# 1. Python序列化与反序列化概述
在信息处理和数据交换日益频繁的今天,数据持久化成为了软件开发中不可或缺的一环。序列化(Serialization)和反序列化(Deserialization)是数据持久化的重要组成部分,它们能够将复杂的数据结构或对象状态转换为可存储或可传输的格式,以及还原成原始数据结构的过程。
序列化通常用于数据存储、
Technical Guide to Building Enterprise-level Document Management System using kkfileview
# 1.1 kkfileview Technical Overview
kkfileview is a technology designed for file previewing and management, offering rapid and convenient document browsing capabilities. Its standout feature is the support for online previews of various file formats, such as Word, Excel, PDF, and more—allowing user
Pandas中的文本数据处理:字符串操作与正则表达式的高级应用
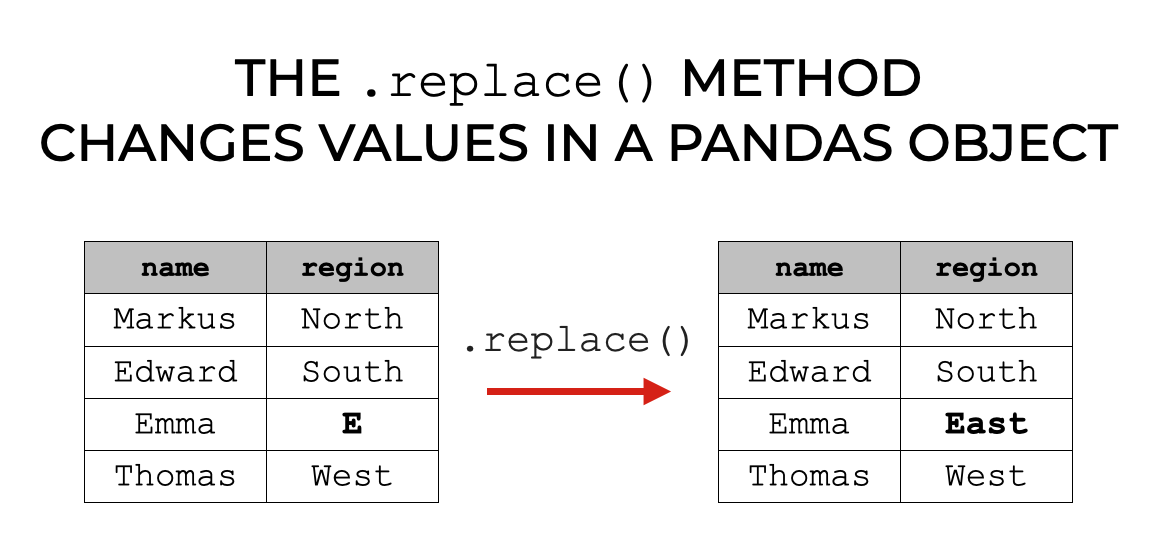
# 1. Pandas文本数据处理概览
Pandas库不仅在数据清洗、数据处理领域享有盛誉,而且在文本数据处理方面也有着独特的优势。在本章中,我们将介绍Pandas处理文本数据的核心概念和基础应用。通过Pandas,我们可以轻松地对数据集中的文本进行各种形式的操作,比如提取信息、转换格式、数据清洗等。
我们会从基础的字
[Frontier Developments]: GAN's Latest Breakthroughs in Deepfake Domain: Understanding Future AI Trends
# 1. Introduction to Deepfakes and GANs
## 1.1 Definition and History of Deepfakes
Deepfakes, a portmanteau of "deep learning" and "fake", are technologically-altered images, audio, and videos that are lifelike thanks to the power of deep learning, particularly Generative Adversarial Networks (GANs
【Python集合异常处理攻略】:集合在错误控制中的有效策略
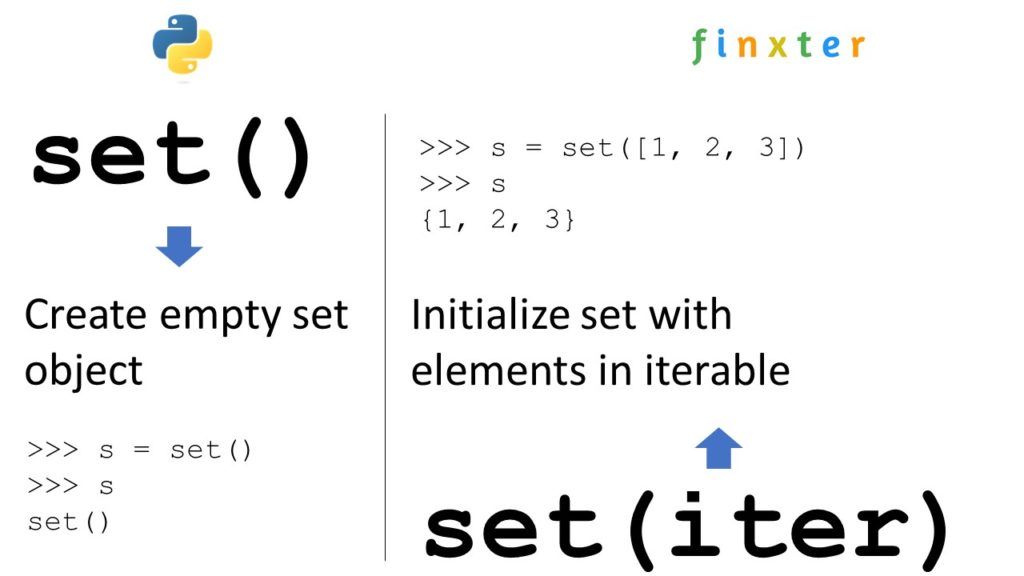
# 1. Python集合的基础知识
Python集合是一种无序的、不重复的数据结构,提供了丰富的操作用于处理数据集合。集合(set)与列表(list)、元组(tuple)、字典(dict)一样,是Python中的内置数据类型之一。它擅长于去除重复元素并进行成员关系测试,是进行集合操作和数学集合运算的理想选择。
集合的基础操作包括创建集合、添加元素、删除元素、成员测试和集合之间的运
【Python版本升级秘籍】:5个技巧助您从Python 2平滑迁移到Python 3

# 1. Python版本升级概述
Python作为一门广泛使用的高级编程语言,其版本升级不仅标志着技术的进步,也直接影响着开发者的日常工作。随着Python 3的推出,逐渐取代了过去的Python 2,带来了诸多改进,如更高的运行效率、更好的支持现代计算需求和更强的安全性。然而,升级过程并非一帆风顺,开发者需要面对许多挑战,比如需要修改大量现有的代码、学习新的库和API、以及可能的性能改变等。本章节将概述Python版本
Python print语句装饰器魔法:代码复用与增强的终极指南

# 1. Python print语句基础
## 1.1 print函数的基本用法
Python中的`print`函数是最基本的输出工具,几乎所有程序员都曾频繁地使用它来查看变量值或调试程序。以下是一个简单的例子来说明`print`的基本用法:
```python
print("Hello, World!")
```
这个简单的语句会输出字符串到标准输出,即你的控制台或终端。`prin
Image Processing and Computer Vision Techniques in Jupyter Notebook
# Image Processing and Computer Vision Techniques in Jupyter Notebook
## Chapter 1: Introduction to Jupyter Notebook
### 2.1 What is Jupyter Notebook
Jupyter Notebook is an interactive computing environment that supports code execution, text writing, and image display. Its main features include:
-
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )