计算几何中的凸包与凸壳:从入门到精通(实战案例解析)
发布时间: 2024-08-26 03:28:31 阅读量: 161 订阅数: 38 

计算几何基础凸包学习笔记

# 1. 凸包与凸壳的概念和性质**
凸包和凸壳是计算几何中两个重要的概念,它们描述了一组点在二维空间中的几何形状。
* **凸包**:一组点构成的最小凸多边形,即包含所有点的最小的凸多边形。
* **凸壳**:一组点构成的最大凸多边形,即包含所有点的最大的凸多边形。
# 2. 凸包与凸壳的算法
凸包与凸壳的算法主要分为两类:凸包算法和凸壳算法。
### 2.1 凸包的算法
凸包算法用于计算给定点集的凸包。凸包是一个包含所有给定点的最小凸多边形。
#### 2.1.1 格雷厄姆扫描算法
格雷厄姆扫描算法是一种基于极角排序的凸包算法。它首先将点集按极角从小到大排序,然后依次将点加入凸包。
**代码块:**
```python
def graham_scan(points):
"""
格雷厄姆扫描算法计算凸包。
参数:
points: 输入点集,每个点为一个元组(x, y)。
返回:
凸包的点集。
"""
# 按极角排序
points.sort(key=lambda p: atan2(p[1], p[0]))
# 初始化凸包
convex_hull = []
# 遍历点集
for point in points:
# 如果凸包为空或点在凸包的最后一个点和倒数第二个点构成的直线的右侧
if not convex_hull or is_right_turn(convex_hull[-2], convex_hull[-1], point):
# 将点加入凸包
convex_hull.append(point)
# 否则,弹出凸包的最后一个点
else:
convex_hull.pop()
# 将点加入凸包
convex_hull.append(point)
return convex_hull
```
**逻辑分析:**
该算法首先将点集按极角排序,然后依次将点加入凸包。如果当前点在凸包的最后一个点和倒数第二个点构成的直线的右侧,则将当前点加入凸包。否则,弹出凸包的最后一个点,再将当前点加入凸包。
#### 2.1.2 Jarvis算法
Jarvis算法是一种基于凸包的性质的凸包算法。它从点集中选择一个点作为凸包的第一个点,然后沿凸包的边界顺时针或逆时针移动,每次选择凸包中与当前点最远的新点。
**代码块:**
```python
def jarvis_march(points):
"""
Jarvis算法计算凸包。
参数:
points: 输入点集,每个点为一个元组(x, y)。
返回:
凸包的点集。
"""
# 选择一个点作为凸包的第一个点
start_point = points[0]
for point in points:
if point[1] < start_point[1]:
start_point = point
# 初始化凸包
convex_hull = [start_point]
# 沿凸包的边界顺时针移动
current_point = start_point
while True:
# 找到与当前点最远的新点
next_point = None
max_distance = 0
for point in points:
if point not in convex_hull:
distance = get_distance(current_point, point)
if distance > max_distance:
max_distance = distance
next_point = point
# 将新点加入凸包
convex_hull.append(next_point)
# 如果新点与第一个点相同,则凸包计算完成
if next_point == start_point:
break
# 更新当前点
current_point = next_point
return convex_hull
```
**逻辑分析:**
该算法首先选择一个点作为凸包的第一个点,然后沿凸包的边界顺时针或逆时针移动,每次选择凸包中与当前点最远的新点。当新点与第一个点相同
# 3. 凸包与凸壳的应用
### 3.1 凸包的应用
凸包在计算机图形学、图像处理和计算几何等领域有着广泛的应用。下面介绍凸包的一些典型应用场景:
#### 3.1.1 多边形面积计算
给定一个多边形,可以通过计算其凸包的面积来近似计算多边形的面积。具体步骤如下:
1. 计算多边形的凸包。
2. 将凸包分解为三角形。
3. 计算每个三角形的面积并求和。
**代码块:**
```python
import math
def convex_hull_area(points):
"""计算多边形的凸包面积。
Args:
points (list): 多边形顶点的坐标列表。
Returns:
float: 凸包的面积。
"""
# 计算凸包
hull = convex_hull(points)
# 分解凸包为三角形
triangles = []
for i in range(len(hull)):
j = (i + 1) % len(hull)
k = (i + 2) % len(hull)
triangles.append((hull[i], hull[j], hull[k]))
# 计算每个三角形的面积并求和
area = 0
for triangle in triangles:
x1, y1 = triangle[0]
x2, y2 = triangle[1]
x3, y3 = triangle[2]
area += 0.5 * abs((x1 * (y2 - y3) + x2 * (y3 - y1) + x3 * (y1 - y2)))
return area
```
**逻辑分析:**
* `convex_hull()` 函数计算多边形的凸包。
* 循环遍历凸包顶点,将凸包分解为三角形。
* 对于每个三角形,计算其面积并累加到 `area` 中。
* 返回 `area`,即凸包的面积。
#### 3.1.2 多边形周长计算
给定一个多边形,可以通过计算其凸包的周长来近似计算多边形的周长。具体步骤如下:
1. 计算多边形的凸包。
2. 计算凸包上所有边的长度并求和。
**代码块:**
```python
def convex_hull_perimeter(points):
"""计算多边形的凸包周长。
Args:
points (list): 多边形顶点的坐标列表。
Returns:
float: 凸包的周长。
"""
# 计算凸包
hull = convex_hull(points)
# 计算凸包上所有边的长度并求和
perimeter = 0
for i in range(len(hull)):
j = (i + 1) % len(hull)
x1, y1 = hull[i]
x2, y2 = hull[j]
perimeter += math.sqrt((x2 - x1)**2 + (y2 - y1)**2)
return perimeter
```
**逻辑分析:**
* `convex_hull()` 函数计算多边形的凸包。
* 循环遍历凸包顶点,计算每条边的长度并累加到 `perimeter` 中。
* 返回 `perimeter`,即凸包的周长。
### 3.2 凸壳的应用
凸壳在图像处理、计算机视觉和机器人学等领域有着广泛的应用。下面介绍凸壳的一些典型应用场景:
#### 3.2.1 多边形裁剪
给定一个多边形和一个裁剪区域,可以通过计算多边形的凸壳来裁剪多边形。具体步骤如下:
1. 计算多边形的凸壳。
2. 计算裁剪区域的凸壳。
3. 求多边形凸壳和裁剪区域凸壳的交集。
**代码块:**
```python
import shapely.geometry as geom
def polygon_clip(polygon, clip_region):
"""裁剪多边形。
Args:
polygon (shapely.geometry.Polygon): 需要裁剪的多边形。
clip_region (shapely.geometry.Polygon): 裁剪区域。
Returns:
shapely.geometry.Polygon: 裁剪后的多边形。
"""
# 计算多边形的凸壳
polygon_hull = polygon.convex_hull
# 计算裁剪区域的凸壳
clip_region_hull = clip_region.convex_hull
# 求多边形凸壳和裁剪区域凸壳的交集
intersection = polygon_hull.intersection(clip_region_hull)
return intersection
```
**逻辑分析:**
* `shapely.geometry.Polygon` 类表示多边形。
* `convex_hull` 属性返回多边形的凸壳。
* `intersection()` 方法返回两个多边形的交集。
#### 3.2.2 点集最近点对查找
给定一个点集,可以通过计算点集的凸壳来查找点集中最近的点对。具体步骤如下:
1. 计算点集的凸壳。
2. 凸壳上的点按顺时针顺序排列。
3. 对于凸壳上的每个点,计算其与相邻两个点的距离。
4. 返回距离最小的点对。
**代码块:**
```python
import math
def closest_pair(points):
"""查找点集中最近的点对。
Args:
points (list): 点集。
Returns:
tuple: 最近的点对。
"""
# 计算点集的凸壳
hull = convex_hull(points)
# 凸壳上的点按顺时针顺序排列
hull.sort(key=lambda point: math.atan2(point[1], point[0]))
# 对于凸壳上的每个点,计算其与相邻两个点的距离
min_dist = float('inf')
closest_pair = None
for i in range(len(hull)):
j = (i + 1) % len(hull)
k = (i + 2) % len(hull)
dist = math.sqrt((hull[i][0] - hull[j][0])**2 + (hull[i][1] - hull[j][1])**2)
if dist < min_dist:
min_dist = dist
closest_pair = (hull[i], hull[j])
return closest_pair
```
**逻辑分析:**
* `convex_hull()` 函数计算点集的凸壳。
* 凸壳上的点按顺时针顺序排列。
* 循环遍历凸壳上的每个点,计算其与相邻两个点的距离。
* 返回距离最小的点对。
# 4. 凸包与凸壳的实战案例解析
### 4.1 凸包的实战案例
#### 4.1.1 计算多边形面积
**问题描述:**
给定一个多边形,求其面积。
**凸包应用:**
凸包可以用来计算多边形的面积。凸包是多边形的所有顶点的凸包络,它是一个凸多边形。凸多边形的面积可以通过以下公式计算:
```python
def polygon_area(points):
"""
计算多边形的面积。
参数:
points: 多边形的顶点列表,按逆时针顺序排列。
返回:
多边形的面积。
"""
n = len(points)
area = 0.0
for i in range(n):
x1, y1 = points[i]
x2, y2 = points[(i + 1) % n]
area += (x1 * y2 - x2 * y1)
return abs(area) / 2.0
```
**代码逻辑分析:**
* 首先计算多边形的顶点数 `n`。
* 初始化面积 `area` 为 0.0。
* 遍历多边形的顶点,计算相邻两条边的叉积,并累加到 `area` 中。
* 最后返回 `area` 的绝对值除以 2.0,得到多边形的面积。
#### 4.1.2 计算多边形周长
**问题描述:**
给定一个多边形,求其周长。
**凸包应用:**
凸包可以用来计算多边形的周长。凸包的周长等于其所有边的长度之和。
```python
def polygon_perimeter(points):
"""
计算多边形的周长。
参数:
points: 多边形的顶点列表,按逆时针顺序排列。
返回:
多边形的周长。
"""
n = len(points)
perimeter = 0.0
for i in range(n):
x1, y1 = points[i]
x2, y2 = points[(i + 1) % n]
perimeter += math.sqrt((x2 - x1) ** 2 + (y2 - y1) ** 2)
return perimeter
```
**代码逻辑分析:**
* 首先计算多边形的顶点数 `n`。
* 初始化周长 `perimeter` 为 0.0。
* 遍历多边形的顶点,计算相邻两条边的长度,并累加到 `perimeter` 中。
* 最后返回 `perimeter`,得到多边形的周长。
### 4.2 凸壳的实战案例
#### 4.2.1 多边形裁剪
**问题描述:**
给定一个多边形和一个裁剪窗口,裁剪多边形,只保留在裁剪窗口内的部分。
**凸壳应用:**
凸壳可以用来裁剪多边形。凸壳是多边形的所有顶点的凸包络,它是一个凸多边形。裁剪多边形时,只需要裁剪凸壳的部分即可。
```python
def clip_polygon(polygon, window):
"""
裁剪多边形。
参数:
polygon: 多边形的顶点列表,按逆时针顺序排列。
window: 裁剪窗口的顶点列表,按逆时针顺序排列。
返回:
裁剪后的多边形的顶点列表。
"""
# 计算多边形的凸壳
convex_hull = convex_hull(polygon)
# 计算裁剪窗口的凸壳
window_hull = convex_hull(window)
# 计算凸壳的交集
intersection = convex_hull_intersection(convex_hull, window_hull)
# 返回交集的顶点列表
return intersection
```
**代码逻辑分析:**
* 首先计算多边形和裁剪窗口的凸壳。
* 然后计算凸壳的交集。
* 最后返回交集的顶点列表,即裁剪后的多边形的顶点列表。
#### 4.2.2 点集最近点对查找
**问题描述:**
给定一个点集,查找最近的点对。
**凸壳应用:**
凸壳可以用来查找点集中的最近点对。凸壳上的点一定是点集中最远的点,因此,凸壳上的点对一定是最远的点对。
```python
def closest_pair(points):
"""
查找点集中的最近点对。
参数:
points: 点集。
返回:
最近点对。
"""
# 计算点集的凸壳
convex_hull = convex_hull(points)
# 查找凸壳上的最近点对
closest_pair = None
min_distance = float('inf')
for i in range(len(convex_hull)):
for j in range(i + 1, len(convex_hull)):
distance = math.sqrt((convex_hull[i][0] - convex_hull[j][0]) ** 2 + (convex_hull[i][1] - convex_hull[j][1]) ** 2)
if distance < min_distance:
min_distance = distance
closest_pair = (convex_hull[i], convex_hull[j])
return closest_pair
```
**代码逻辑分析:**
* 首先计算点集的凸壳。
* 然后遍历凸壳上的所有点对,计算点对之间的距离。
* 最后返回距离最小的点对。
# 5. 凸包与凸壳的高级话题
### 5.1 凸包的拓展
#### 5.1.1 三维凸包
**概念:**
三维凸包是指三维空间中的一组点,其中任何两点之间的连线段都包含在凸包内。
**算法:**
计算三维凸包的算法与二维凸包类似,但复杂度更高。常用的算法包括:
- **快速凸包算法:**与二维凸包中的快速凸包算法类似,但需要对三维空间进行三角剖分。
- **分治算法:**将点集递归地分成较小的子集,并分别计算子集的凸包,然后合并这些凸包得到整个点集的凸包。
#### 5.1.2 动态凸包
**概念:**
动态凸包是指随着点集的动态变化而不断更新的凸包。
**算法:**
维护动态凸包的算法需要考虑点集的增删改。常用的算法包括:
- **增量算法:**当新点加入点集时,逐步更新凸包,保证凸包的性质。
- **减量算法:**当点从点集中删除时,逐步更新凸包,保证凸包的性质。
### 5.2 凸壳的拓展
#### 5.2.1 半平面交
**概念:**
半平面交是指求解一组半平面相交部分的算法。
**算法:**
常用的半平面交算法包括:
- **扫描线算法:**沿垂直于半平面法向量的扫描线进行扫描,维护当前扫描线上的半平面交。
- **分治算法:**将半平面集递归地分成较小的子集,并分别计算子集的半平面交,然后合并这些半平面交得到整个半平面集的半平面交。
#### 5.2.2 沃罗诺伊图
**概念:**
沃罗诺伊图是一种将平面或空间划分为多个区域的结构,每个区域包含到该区域内某一点最近的所有点。
**算法:**
计算沃罗诺伊图的算法包括:
- **增量算法:**逐步添加点到点集中,并更新沃罗诺伊图。
- **分治算法:**将点集递归地分成较小的子集,并分别计算子集的沃罗诺伊图,然后合并这些沃罗诺伊图得到整个点集的沃罗诺伊图。
# 6. 凸包与凸壳的总结与展望
**6.1 凸包与凸壳的总结**
凸包和凸壳是计算几何中两个重要的概念,它们在许多领域都有着广泛的应用。通过本章的学习,我们对凸包和凸壳的算法、性质和应用有了深入的理解。
**6.2 凸包与凸壳的展望**
随着计算几何的发展,凸包和凸壳的研究也在不断深入。目前,凸包和凸壳的研究主要集中在以下几个方面:
* **算法的优化:**不断探索更有效率的凸包和凸壳算法,以应对大规模数据集的处理。
* **拓展应用:**将凸包和凸壳应用到更多的领域,例如计算机图形学、机器人学和数据分析等。
* **理论研究:**深入研究凸包和凸壳的理论性质,探索新的算法和优化技术。
**6.3 凸包与凸壳的未来发展**
凸包和凸壳在计算几何领域具有重要的地位,随着技术的不断发展,它们在未来将发挥越来越重要的作用。我们可以期待在以下几个方面取得突破:
* **实时处理:**开发能够实时处理大规模凸包和凸壳的算法,满足实时应用的需求。
* **分布式计算:**探索分布式计算技术,将凸包和凸壳算法应用到分布式系统中,提高计算效率。
* **人工智能:**将人工智能技术与凸包和凸壳相结合,开发新的算法和优化技术,增强凸包和凸壳的处理能力。
总之,凸包和凸壳的研究和应用前景广阔,相信在未来将取得更多的突破,为计算几何领域的发展做出更大贡献。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了计算几何的基本概念和广泛的应用,涵盖了从基础几何表示到复杂算法和实际应用的各个方面。从凸包和 Voronoi 图到 Delaunay 三角剖分和最近点对问题,读者将掌握计算几何的基石。此外,专栏还探讨了多边形相交、点集覆盖、范围查询和运动规划等高级主题。通过深入剖析计算机图形学、计算机视觉、地理信息系统、生物信息学、金融工程、运筹学、机器学习、大数据分析、云计算和物联网等领域的应用,本专栏展示了计算几何在现代技术中的强大作用。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
绿联USB转RS232驱动故障速解:常见问题的诊断与解决

# 摘要
绿联USB转RS232驱动是连接USB设备与RS232串行设备的重要工具,其稳定性和兼容性对数据通信至关重要。本文旨在概述USB转RS232驱动的基础知识,并详细介绍故障诊断、故障解决、性能优化的策略与实践。通过分析常见的驱动故障类型,包括系统识别问题、数据
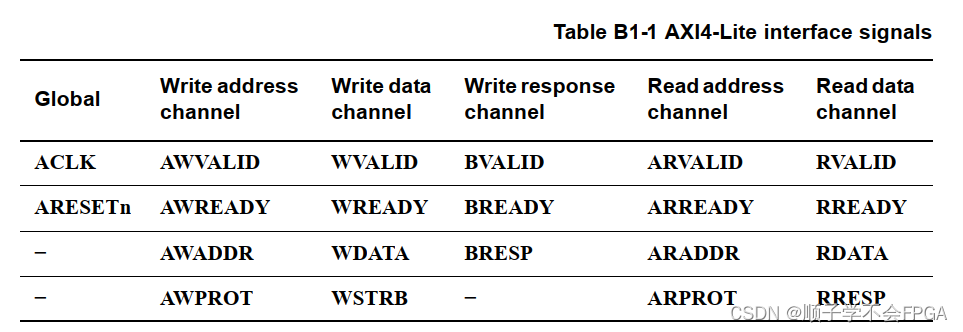
【AXI总线核心教程】:精通AXI协议,优化PCIe Gen3桥接性能
# 摘要
AXI总线协议作为高性能片上互连的重要标准,广泛应用于现代集成电路设计中。本文深入分析了AXI协议的核心特性,包括数据传输机制、控制信号解析及性能优化基础。进而探讨了AXI与PCIe Gen3之间的桥接原理,包括桥接设计、性能影响因素和桥接功能扩展。文章还结合实际案例,对AXI协议的实践应用进行了详细分析,并提出了一系列优化策略。最后,本文展望了未来AXI桥接技术的发展方
【性能飙升】

# 摘要
随着信息技术的快速发展,性能优化成为提升软件和系统效率的关键手段。本文首先介绍性能优化的理论基础及其重要性,随后详细探讨性能测试的方法论、性能瓶颈的识别以及实践案例分析。接着,本文转向
Erdas非监督分类中聚类算法详解及选择指南:专家推荐技巧

# 摘要
Erdas非监督分类技术是一种高效的空间数据分析方法,特别适用于遥感图像处理。本文首先概述了非监督分类的概念,并深入分析了聚类算法的原理,包括算法类型、数学模型、优化方法和评价标准。接着,文章展示了在Erdas软件环境下的算法应用实践,包括算法实现、操作步骤和聚类结果的分析。文章进一步讨论了非监
本地化测试的命脉:为什么ISO-639-2语言代码至关重要

# 摘要
本论文深入探讨了ISO-639-2语言代码的使用和管理,并分析了其在软件开发和本地化流程中的关键作用。文中首先概述了ISO-639-2语言代码的基本概念,强调了在软件开发中识别与分类语言代码的重要性。随后,论文详细阐述了语言代码在本地化测试和管理中的实践,包括测试环境配置、本地化测试用例设计以及问题识别与修复。论文进一步探讨了语言
Apollo Dreamview系统优化:性能与稳定性提升秘籍,实战心得

# 摘要
Apollo Dreamview系统作为自动驾驶领域的关键组件,对性能和稳定性有着严苛要求。本文首先概述了Apollo Dreamview系统的基本架构及其性能优化的基础知识,随后深入探讨了性能优化策略,包括系统架构理解、代码优化、资源管理等方面。接着,文章详述了通过改进错误处理机制、加强测试验证流程和优化
【伺服系统全面解析】:汇川IS620P(N)系列在自动化中的关键作用及基础应用
# 摘要
伺服系统是自动化技术中不可或缺的关键组成部分,它通过精确的位置、速度和转矩控制实现高效精确的机械运动。本文介绍了伺服系统的基础知识与原理,重点分析了汇川IS620P(N)系列伺服系统的特性、硬件组件、软件支持以及在自动化领域的应用。文章详述了系统配置与调试过程,包括驱动器安装、参数优化和故障诊断,并通过基础应用实例和高级应用案例展示了汇川
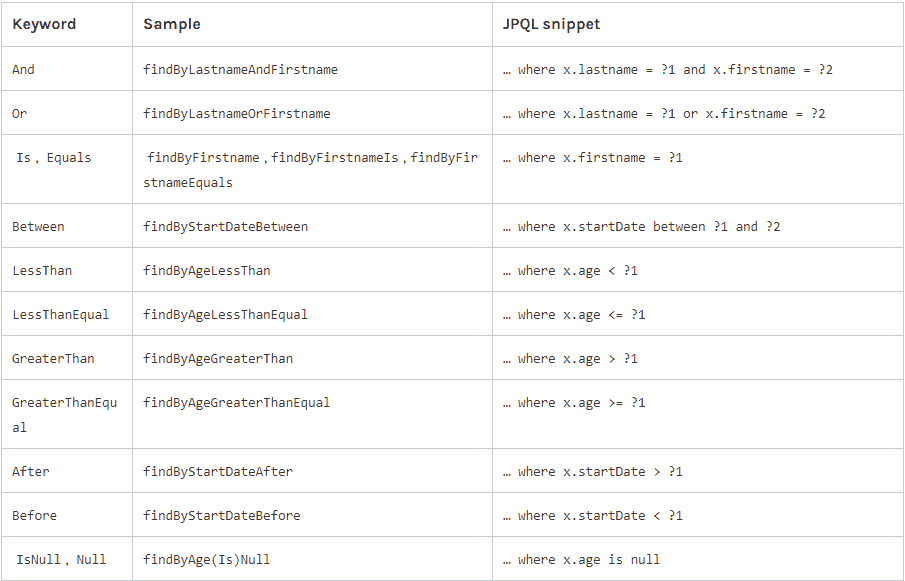
【动态查询机制全面解读】:Spring Data JPA与Hibernate高级技巧
# 摘要
动态查询机制是现代数据库应用中不可或缺的技术,其基础概念和原理对实现灵活高效的数据库交互至关重要。本文首先介绍了动态查询的基础概念与原理,然后深入分析了Spring Data JPA和Hibernate这两种流行的Java持久化框架中动态查询技术的实现和性能优化方法。通过实例探讨了动态查询技术在实际项目中的应用,包括与用户界面的
【企业邮箱整合Gmail】:如何快速提升品牌专业形象

# 摘要
本文探讨了企业邮箱在塑造品牌形象中的作用,并详细介绍了Gmail的基本功能、特点及其在企业环境中的应用。文章从账户设置、高级功能、安全特性等方面深入分析了Gmail的使用,并提出了整合Gmail到企业邮箱的步骤、实践技巧以及监控和维护的方法。此外,本文还探讨了如何通过Gmail的定制化、自动化和与其他企业应用的集成,提升邮件沟通效率及品牌形象。
# 关键字
企业邮箱;品牌形象;Gmail功能;邮件整合;自动化流程
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )