A*寻路算法:Java应用精髓与场景剖析
发布时间: 2024-08-29 22:36:11 阅读量: 97 订阅数: 30 

A*自动寻路算法实现(java)

# 1. A*寻路算法概述
在本章中,我们将对A*寻路算法进行一个初步的介绍,作为后续章节深入探讨算法细节与应用的铺垫。A*算法是一种广泛应用于路径查找和图遍历的经典算法,它结合了最佳优先搜索和Dijkstra算法的优点,能够高效地找到从起点到终点的最短路径。虽然A*算法需要额外的存储空间来保存路径信息,但其在保证路径最短的同时,减少了搜索范围,显著提高了搜索效率。我们将简述A*算法的基本原理,为读者提供理解后续章节内容的基础。
# 2. A*算法的理论基础
## 2.1 算法的数学模型
### 2.1.1 启发式搜索原理
启发式搜索是一种基于经验或直觉的搜索方法,它使用启发式信息来指导搜索方向,以期快速找到问题的解。在A*算法中,启发式搜索原理主要体现在算法如何选择下一个要探索的节点,从而有效逼近目标节点。
具体来说,A*算法在每个节点n,都会根据一个评估函数f(n)来计算一个值,此值表示从起始节点到目标节点经过节点n的成本期望。评估函数定义为 f(n) = g(n) + h(n),其中:
- g(n) 是从起始节点到节点n的实际代价;
- h(n) 是节点n到目标节点的估计代价,即启发式函数。
因此,A*算法倾向于选择那些其f(n)值最小的节点进行扩展。这种方法能够确保算法朝着可能包含最短路径的方向前进,从而提高搜索效率。
### 2.1.2 评估函数的设计
评估函数是A*算法性能的关键,其设计直接影响到算法的效率和找到的路径质量。h(n)的值应当是对从n到目标节点代价的最优估计。
一个理想的启发式函数,即所谓的“一致性”或“单调性”函数,需要满足以下条件:
- h(n) ≤ c(n, m) + h(m),对于任意的节点n和其任意后继节点m,其中c(n, m)是从n到m的实际代价。
这个条件保证了算法在不回溯的情况下能够找到最优路径。实际上,如果h(n)与实际代价一致,那么A*算法将能够找到最短路径,并且效率最优。
实践中,h(n)通常是基于问题特性的启发式估计。例如,在网格地图中,常常使用曼哈顿距离或欧几里得距离来估计节点间的距离。
## 2.2 A*算法的优化策略
### 2.2.1 启发函数的选择与优化
选择合适的启发式函数,是优化A*算法的关键步骤。一个好的启发式函数能够显著减少搜索空间,加快搜索速度。
例如,在棋盘游戏中,通常使用每个棋子到目标位置的直线距离作为启发式值。而在实际的地理导航中,则可能利用道路网络信息,将启发式函数设为道路距离。
### 2.2.2 数据结构与算法效率
数据结构的选择对算法的效率有重大影响。A*算法常用到优先队列(如二叉堆)来存储待扩展节点,并根据评估函数值进行排序,以优先处理最小值的节点。
为了进一步提高效率,可以采用开放列表(open list)和封闭列表(closed list)的数据结构。开放列表用于保存所有待评估的节点,而封闭列表则用于记录已经评估过的节点。这样可以防止算法对同一节点进行重复处理,有效减少计算量。
### 2.2.3 路径平滑与优化
路径平滑是指在搜索出路径之后,通过某种方法优化路径,使其更加合理或更加短小。这一步骤并非A*算法的必要组成部分,但可以显著提高路径的实用性。
例如,路径平滑可以采用向后搜索的方法,从目标节点开始,向起始节点回溯,如果存在其他到达当前节点的路径,并且代价更低,则用这条路径替代。
```mermaid
graph TD;
A[起始节点] --> B;
B --> C;
C --> D;
D --> E[目标节点];
E --> D';
D' --> C';
C' --> B';
B' --> A';
style A fill:#f9f,stroke:#333,stroke-width:2px;
style E fill:#ccf,stroke:#333,stroke-width:2px;
```
上图显示了路径平滑的一个例子,其中虚线部分表示经过平滑处理后的路径。
代码块展示了如何通过代码实现路径的平滑优化:
```java
public List<Node> smoothPath(List<Node> originalPath) {
List<Node> smoothedPath = new ArrayList<>();
// 从目标节点开始向前遍历
Node current = originalPath.get(originalPath.size() - 1);
smoothedPath.add(current);
while(current.getPrevious() != null) {
Node previous = current.getPrevious();
// 检查是否有其他路径
if (findLowerCostPath(previous, current)) {
smoothedPath.add(previous);
}
current = previous;
}
// 反转列表以形成从起始节点到目标节点的路径
Collections.reverse(smoothedPath);
return smoothedPath;
}
// 该方法用于寻找到某节点的代价更低的路径,具体实现依赖于问题的具体场景
private boolean findLowerCostPath(Node target, Node current) {
// ...
return false; // 示例中,返回false表示没有找到更好的路径
}
```
在此代码中,`findLowerCostPath`方法应该根据实际应用场景进行具体的实现,以寻找到给定节点是否有代价更低的路径。
通过这样的优化,A*算法不仅能够找到一条从起始点到目标点的路径,而且还能得到一条尽可能优化的路径,使得其在实际应用中表现得更为出色。
# 3. A*算法在Java中的实现
随着我们对A*算法的理解不断深入,接下来我们步入实际操作的阶段。在本章节中,我们将深入探讨如何使用Java语言来实现A*算法。首先,我们会准备相应的Java开发环境与工具。随后,我们将逐步解析A*算法的核心Java代码实现,包括核心算法的代码解析、辅助数据结构的实现以及算法的封装与接口设计。
## 3.1 Java环境与工具准备
### 3.1.1 开发环境配置
Java语言以其跨平台性、对象导向、安全性、多线程等特性在企业级应用中广泛使用。为了实现A*算法,我们需要先准备一个合适的Java开发环境。以下是一般推荐的步骤:
- 下载并安装Java Development Kit (JDK)。建议选择最新稳定版以获得最佳的开发体验。
- 配置环境变量,包括`JAVA_HOME`,确保Java运行时环境能够在命令行或IDE中被正确识别。
- 选择并安装一个集成开发环境(IDE),例如IntelliJ IDEA或Eclipse。IDE将提供代码编写、调试和项目管理的便捷功能。
- 在IDE中创建一个新的Java项目,并配置好项目依赖和设置。
### 3.1.2 必要的类库和工具介绍
在实现A*算法时,我们可能会用到一些额外的类库和工具,这些将使得我们的开发工作更加高效和有条不紊。举例如下:
- **JGraphT**:这是一个图和树的库,可以方便地构建和管理图结构,支持多种图的表示方式。
- **JUnit**:用于编写和运行测试,确保算法实现的正确性和健壮性。
- **Apache Commons**:包含多种有用的工具类,如集合操作、字符串处理等,可以让代码更加简洁。
通过这些类库的辅助,我们可以将精力更加集中在算法的核心逻辑上,而非底层的数据结构管理。
## 3.2 A*算法的Java代码实现
### 3.2.1 核心算法代码解析
实现A*算法的Java代码可以被拆分成几个关键部分。核心算法的实现将涵盖以下几个步骤:
- **定义地图结构**:地图可以使用二维数组表示,其中每个元素代表地图上的一个单元格,可以包含障碍物或者通路。
- **定义节点和路径**:节点类(`Node`)将包含节点的坐标、父节点引用以及当前成本、估计成本(`g`值和`h`值)和总成本(`f`值)。
- **启发式函数(`h`函数)**:对于路径计算,启发式函数是至关重要的,它决定了路径的优先级。可以使用曼哈顿距离或欧几里得距离作为启发式评估函数。
- **优先队列**:优先队列用于存储待处理的节点,Java中`PriorityQueue`类可以满足这个需求,并且可以按照自定义的比较器来排序。
```java
public class AStar {
// 定义地图大小常量
private static final int WIDTH = 10;
private static final int HEIGHT = 10;
// A* 算法的主循环
public List<Node> findPath(Node start, Node goal) {
PriorityQueue<Node> openSet = new PriorityQueue<>();
HashSet<Node> closedSet = new HashSet<>();
start.g = 0;
start.f = heuristic(start, goal);
openSet.add(start);
while (!openSet.isEmpty()) {
Node current = openSet.poll();
if (current.equals(goal)) {
return constructPath(current);
}
closedSet.add(current);
// 遍历当前节点的所有邻居节点
for (Node neighbor : getNeighbors(current)) {
if (closedSet.contains(neighbor)) {
continue; // 跳过已经被评估过的节点
}
double tentative_gScore = current.g + distance(current, neighbor);
if (!openSet.contains(neighbor)) {
openSet.add(neighbor);
} else if (tentative_gScore >= neighbor.g) {
continue; // 这不是更好的路径
}
neighbor.parent = current;
neighbor.g = tentative_gScore;
neighbor.f = neighbor.g + heuristic(neighbor, goal);
}
}
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 Java 中最短路径算法的实现,涵盖了各种算法,包括 Dijkstra、Floyd-Warshall、A*、Bellman-Ford、SPFA、DAG 最短路径算法、并行计算、动态规划等。它提供了全面的指导,从基础概念到高级优化技术,帮助读者掌握图搜索算法,提升效率。此外,专栏还分析了图数据结构和存储对算法性能的影响,并比较了邻接表和邻接矩阵在最短路径算法中的应用。通过深入的讲解和实战案例,本专栏为 Java 开发人员提供了全面了解和掌握最短路径算法的宝贵资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
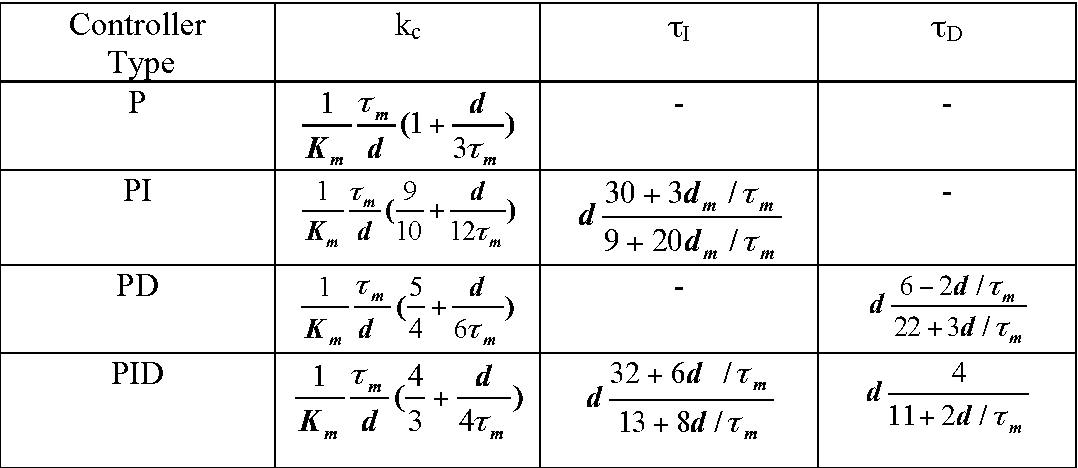
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
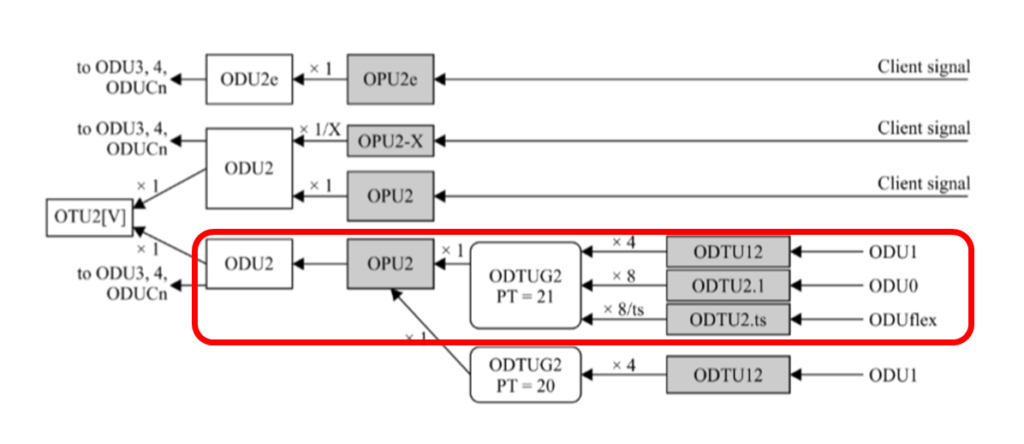
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
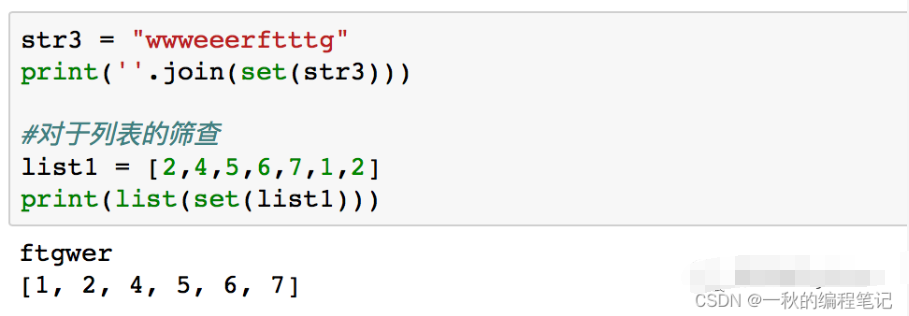
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )