The Role of Transpose Matrices in Control Theory: Understanding the Mathematical Foundations of System Stability and Controllability
发布时间: 2024-09-13 22:03:26 阅读量: 16 订阅数: 20 
# 1. Basic Concepts of Matrix Theory
Matrix theory is a branch of linear algebra that studies the properties, operations, and applications of matrices. Matrices have extensive applications in control theory, signal processing, computer graphics, and other fields.
This section will introduce the fundamental concepts and operations of matrices, including the definition of matrices, matrix addition, subtraction, multiplication, division, transposition, determinants, rank, eigenvalues, and eigenvectors of matrices. These concepts and operations lay the foundation for subsequent chapters on the application of transposed matrices in control theory.
# 2. Application of Transposed Matrices in System Stability Analysis
Transposed matrices play a crucial role in the analysis of system stability. They provide powerful tools for assessing system stability, enabling engineers to predict and control the behavior of systems. This chapter will delve into the application of transposed matrices in the Lyapunov Stability Theorem and the Routh-Hurwitz Stability Criteria.
### 2.1 Lyapunov Stability Theorem
The Lyapunov Stability Theorem is a powerful mathematical tool for determining the stability of nonlinear systems. The theorem is based on the concept of a Lyapunov function, which is a scalar function defined on the system's state space.
#### 2.1.1 Definition and Properties of Lyapunov Functions
Lyapunov functions must satisfy the following properties:
***Positivity:** For all non-zero states x, Lyapunov function V(x) > 0.
***Continuity:** The Lyapunov function V(x) must be continuous.
***Radial Unboundedness:** As ||x|| → ∞, Lyapunov function V(x) → ∞.
#### 2.1.2 Application of Lyapunov Stability Theorem
The Lyapunov Stability Theorem provides the following stability criteria:
***Stability:** If there exists a Lyapunov function V(x) that satisfies the above properties, then the system is stable at the origin.
***Asymptotic Stability:** If the Lyapunov function V(x) satisfies the above properties and there exists a region around the origin where V(x) decreases monotonically along trajectories, then the system is asymptotically stable at the origin.
***Exponential Stability:** If the Lyapunov function V(x) satisfies the above properties and there exists a region around the origin where V(x) decreases exponentially along trajectories, then the system is exponentially stable at the origin.
### 2.2 Routh-Hurwitz Stability Criteria
The Routh-Hurwitz Stability Criteria are an algebraic method for determining the stability of linear systems. The criteria are based on the coefficients of the system's characteristic polynomial.
#### 2.2.1 Derivation of Routh-Hurwitz Criteria
The Routh-Hurwitz Criteria are derived by representing the characteristic polynomial as the determinant of a symmetric matrix called the Routh matrix.
#### 2.2.2 Application of Routh-Hurwitz Criteria
The Routh-Hurwitz Criteria provide the following stability criteria:
***Stability:** If all elements of the Routh matrix are positive, then the system is stable.
***Instability:** If there is a sign change in the Routh matrix, then the system is unstable.
**Code Block:**
```python
import numpy as np
def routh_hurwitz(coeffs):
"""
Determines the stability of a linear system using the Routh-Hurwitz Criteria.
Parameters:
coeffs: Coefficients of the characteristic polynomial, arranged in descending order.
Returns:
True if the system is stable, otherwise False.
"""
# Build the Routh matrix
n = len(coeffs)
r = np.zeros((n, n))
for i in range(n):
for j in range(n):
if i + j < n:
r[i, j] = coeffs[i + j]
elif i + j == n:
r[i, j] = 0
# Check the signs of the Routh matrix
for i in range(n):
if r[i, 0] < 0:
return False
return True
```
**Logical Analysis:**
This code block implements the Routh-Hurwitz Criteria. It first constructs the Routh matrix and then checks for any sign changes in the matrix. If sign changes are present, the system is unstable.
**Parameter Explanation:**
* `coeffs`: Coefficients of the characteristic polynomial, arranged i

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
R语言数据包安全使用指南:规避潜在风险的策略
# 1. R语言数据包基础知识
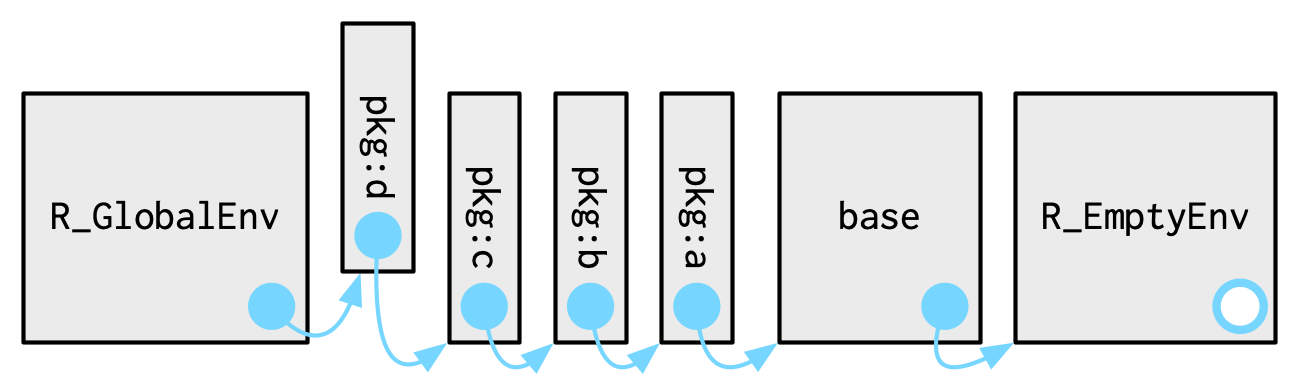
在R语言的世界里,数据包是构成整个生态系统的基本单元。它们为用户提供了一系列功能强大的工具和函数,用以执行统计分析、数据可视化、机器学习等复杂任务。理解数据包的基础知识是每个数据科学家和分析师的重要起点。本章旨在简明扼要地介绍R语言数据包的核心概念和基础知识,为
模型结果可视化呈现:ggplot2与机器学习的结合
# 1. ggplot2与机器学习结合的理论基础
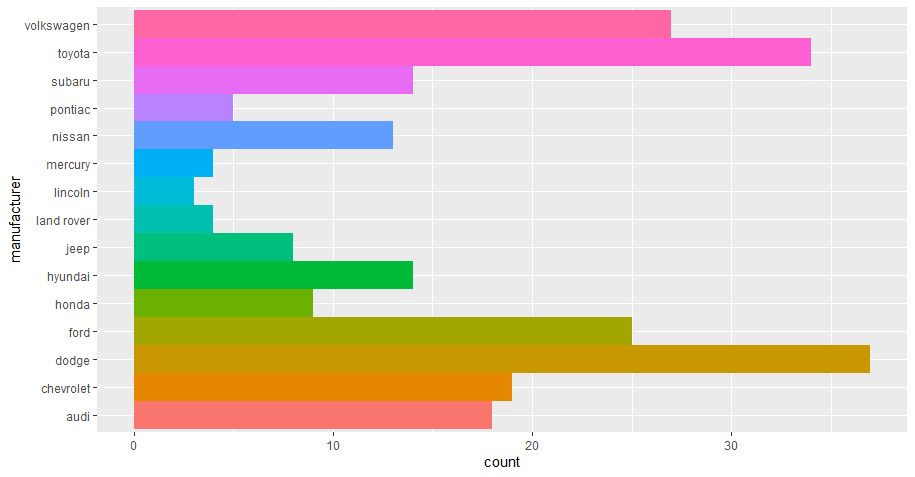
ggplot2是R语言中最受欢迎的数据可视化包之一,它以Wilkinson的图形语法为基础,提供了一种强大的方式来创建图形。机器学习作为一种分析大量数据以发现模式并建立预测模型的技术,其结果和过程往往需要通过图形化的方式来解释和展示。结合ggplot2与机器学习,可以将复杂的数据结构和模型结果以视觉友好的形式展现
【R语言地理信息数据分析】:chinesemisc包的高级应用与技巧
# 1. R语言与地理信息数据分析概述
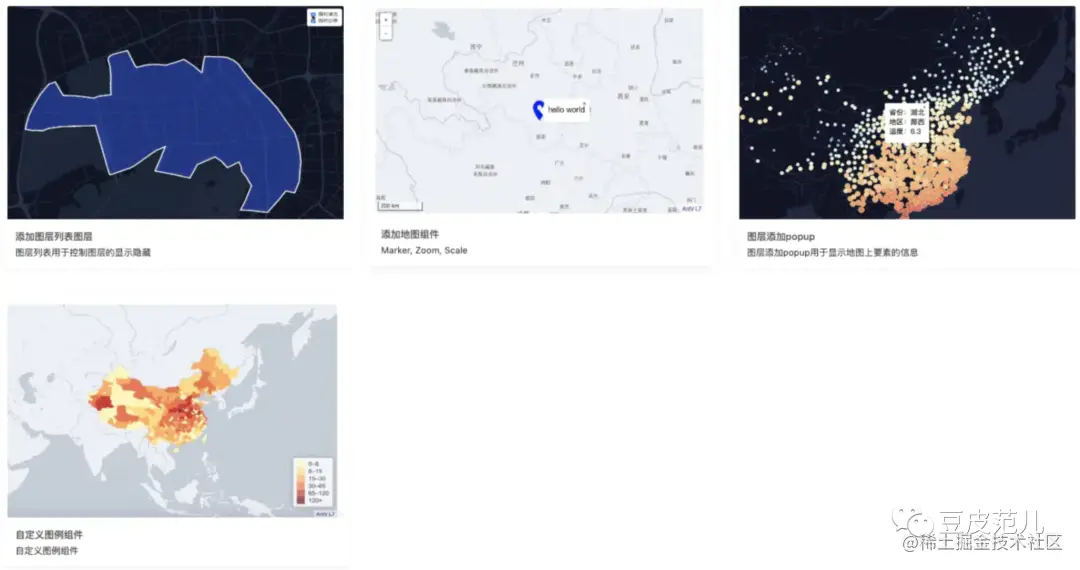
R语言作为一种功能强大的编程语言和开源软件,非常适合于统计分析、数据挖掘、可视化以及地理信息数据的处理。它集成了众多的统计包和图形工具,为用户提供了一个灵活的工作环境以进行数据分析。地理信息数据分析是一个特定领域
R语言与SQL数据库交互秘籍:数据查询与分析的高级技巧
# 1. R语言与SQL数据库交互概述
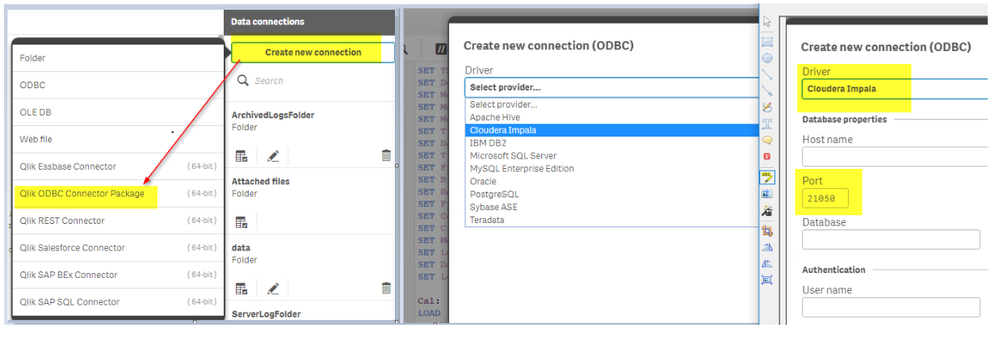
在数据分析和数据科学领域,R语言与SQL数据库的交互是获取、处理和分析数据的重要环节。R语言擅长于统计分析、图形表示和数据处理,而SQL数据库则擅长存储和快速检索大量结构化数据。本章将概览R语言与SQL数据库交互的基础知识和应用场景,为读者搭建理解后续章节的框架。
## 1.
【数据子集可视化】:lattice包高效展示数据子集的秘密武器

# 1. 数据子集可视化简介
在数据分析的探索阶段,数据子集的可视化是一个不可或缺的步骤。通过图形化的展示,可以直观地理解数据的分布情况、趋势、异常点以及子集之间的关系。数据子集可视化不仅帮助分析师更快地发现数据中的模式,而且便于将分析结果向非专业观众展示。
数据子集的可视化可以采用多种工具和方法,其中基于R语言的`la
【Tau包社交网络分析】:掌握R语言中的网络数据处理与可视化
# 1. Tau包社交网络分析基础
社交网络分析是研究个体间互动关系的科学领域,而Tau包作为R语言的一个扩展包,专门用于处理和分析网络数据。本章节将介绍Tau包的基本概念、功能和使用场景,为读者提供一个Tau包的入门级了解。
## 1.1 Tau包简介
Tau包提供了丰富的社交网络分析工具,包括网络的创建、分析、可视化等,特别适合用于研究各种复杂网络的结构和动态。它能够处理有向或无向网络,支持图形的导入和导出,使得研究者能够有效地展示和分析网络数据。
## 1.2 Tau与其他网络分析包的比较
Tau包与其他网络分析包(如igraph、network等)相比,具备一些独特的功能和优势。
模型验证的艺术:使用R语言SolveLP包进行模型评估
# 1. 线性规划与模型验证简介
## 1.1 线性规划的定义和重要性
线性规划是一种数学方法,用于在一系列线性不等式约束条件下,找到线性目标函数的最大值或最小值。它在资源分配、生产调度、物流和投资组合优化等众多领域中发挥着关键作用。
```mermaid
flowchart LR
A[问题定义] --> B[建立目标函数]
B --> C[确定约束条件]
C --> D[
【R语言可视化优化】:qplot参数调优,解锁专业统计图表(附案例研究)
# 1. R语言数据可视化简介
## 1.1 数据可视化的重要性
在信息爆炸的时代,数据可视化是将复杂数据集转化为直观、易于理解的图表的过程。这不仅帮助我们更快地洞察数据,而且还可以辅助决策者做出更明智的选择。R语言作为一个强大的统计分析和图形工具,特别适合于数据可视化任务。
## 1.2 R语言的优势
R语言之所以成为
R语言tm包中的文本聚类分析方法:发现数据背后的故事

# 1. 文本聚类分析的理论基础
## 1.1 文本聚类分析概述
文本聚类分析是无监督机器学习的一个分支,它旨在将文本数据根据内容的相似性进行分组。文本数据的无结构特性导致聚类分析在处理时面临独特挑战。聚类算法试图通过发现数据中的自然分布来形成数据的“簇”,这样同一簇内的文本具有更高的相似性。
## 1.2 聚类分
R语言数据包性能监控:实时跟踪使用情况的高效方法
# 1. R语言数据包性能监控概述
在当今数据驱动的时代,对R语言数据包的性能进行监控已经变得越来越重要。本章节旨在为读者提供一个关于R语言性能监控的概述,为后续章节的深入讨论打下基础。
## 1.1 数据包监控的必要性
随着数据科学和统计分析在商业决策中的作用日益增强,R语言作为一款强大的统计分析工具,其性能监控成为确保数据处理效率和准确性的重要环节。性能监控能够帮助我们识别潜在的瓶颈,及时优化数据包的使用效率,提
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )