【零基础入门强化学习】:一文掌握RL核心概念与实战技巧
发布时间: 2024-11-19 15:37:02 阅读量: 25 订阅数: 22 

从游戏AI到自动驾驶,一文看懂强化学习的概念及应用
# 1. 强化学习基础概念解析
## 1.1 强化学习简介
强化学习(Reinforcement Learning,简称 RL)是一种机器学习范式,通过与环境的交互来学习如何在特定任务上取得最大化的累积奖励。它是基于试错的学习过程,智能体(agent)通过选择不同的动作,并接收环境对其行为的反馈(奖励或惩罚),逐渐学习到最有效的策略(policy)。
## 1.2 强化学习的关键组成部分
在强化学习中,以下几个组成部分至关重要:
- **智能体(Agent)**:学习并采取行动的实体。
- **环境(Environment)**:智能体所处的外部世界,能够对其行为做出响应。
- **状态(State)**:环境的某一特定情况或条件的表示。
- **动作(Action)**:智能体能够执行的操作。
- **奖励(Reward)**:智能体从环境中获得的即时反馈信号。
## 1.3 强化学习的应用场景
强化学习在各种场景下都有应用,例如游戏AI、机器人控制、自动驾驶、资源管理、推荐系统等。通过自动决策和策略优化,它能够解决传统算法难以应对的复杂决策问题。随着技术的发展,强化学习的应用范围还在不断扩大。
# 2. 强化学习的数学基础与算法原理
## 2.1 马尔可夫决策过程(MDP)
### 2.1.1 MDP的定义与要素
马尔可夫决策过程(Markov Decision Process,MDP)是强化学习中的核心概念,它提供了一个数学框架,用于描述在环境的每个状态中,智能体如何选择行为,并且如何通过这些行为获得奖励。MDP由以下几个基本元素组成:
- 状态空间(State Space):状态空间是所有可能状态的集合,通常用S表示。在每个状态下,智能体可以观测到环境的状态。
- 行为空间(Action Space):在每个状态下,智能体可以选择的行为集合,通常用A表示。
- 状态转移概率(State Transition Probabilities):表示智能体采取特定行为后,环境转移到新状态的概率。这个概率通常用P(s'|s,a)表示,其中s和s'分别是转移前后的状态,a是智能体选择的行为。
- 奖励函数(Reward Function):表示智能体在每个状态转移后获得的即时奖励,用R(s,a,s')表示,即在从状态s通过行为a转移到状态s'时获得的奖励。
- 折扣因子(Discount Factor):折扣因子γ用于折现未来的奖励,取值范围为0到1。它决定了智能体对远期奖励的偏好程度,值越小,智能体越重视即时奖励。
MDP假设环境遵循马尔可夫性质,即下一个状态的概率仅依赖于当前状态和当前行为,与之前的状态和行为无关。这一性质使得MDP成为一个马尔可夫过程。
### 2.1.2 MDP的数学表示与状态转移概率
MDP的数学表示可以通过一个五元组来定义:
```
MDP = <S, A, P, R, γ>
```
其中,S是状态空间,A是行为空间,P是状态转移概率,R是奖励函数,而γ是折扣因子。
状态转移概率P(s'|s,a)可以详细地描述MDP的动态过程。它是一个概率分布,对于每一对(s,a),它给出了智能体在执行行为a之后转移到状态s'的概率。状态转移概率的完整性确保了MDP的每个状态和行为对都有一个明确的转移概率与之对应。
例如,如果智能体在状态s下选择行为a后,环境有20%的概率转移到状态s1,有30%的概率转移到状态s2,那么我们可以表示为:
```
P(s1|s,a) = 0.2
P(s2|s,a) = 0.3
```
理解MDP的关键在于把握其动态特性,即状态、行为、奖励和转移概率之间的关系。强化学习算法的核心目标就是学习一个策略(Policy),该策略能够根据当前状态选择最有可能导致高奖励的行为。MDP提供了一个理论框架来优化这个策略,使得智能体能够在不确定的环境中学习并采取最优行动。
## 2.2 Q学习与策略评估
### 2.2.1 Q学习算法的原理
Q学习是一种无模型的强化学习算法,它不需要环境的动态模型,而是直接学习一个行为-值函数(Action-Value Function),通常简称为Q函数。Q函数用于表示在给定状态下执行特定行为的预期回报(Expected Return)。
Q学习的策略评估使用以下更新规则来迭代更新Q值:
```
Q(s, a) ← Q(s, a) + α * [r + γ * max(Q(s', a')) - Q(s, a)]
```
这里,s表示当前状态,a表示当前行为,α是学习率,r是实际获得的奖励,s'是转移后的状态,a'是在状态s'下采取的最佳行为。Q学习算法试图找到一个Q函数,使得对于所有状态-行为对(s,a),Q(s, a)都近似等于Q* (s, a),即最优Q值。
### 2.2.2 策略评估方法
策略评估是指在强化学习中,如何根据策略来评估或更新状态-行为值函数的过程。在Q学习中,策略评估关注于如何根据学习到的Q值来更新策略。这个过程通常是通过贪婪策略来进行的,即在每个状态下选择具有最高Q值的行为。这一过程可以用以下公式表达:
```
π(s) = argmax_a Q(s, a)
```
这里的π(s)代表策略,它在每个状态s下都选择使得Q值最大的行为a。策略评估的目的是不断更新Q值,直到它们收敛到最优Q值,即Q*(s, a)。
在实际应用中,策略评估过程可能涉及到探索(Exploration)和利用(Exploitation)之间的权衡。探索是指尝试那些未知的行为来获取更多信息,而利用则是基于当前知识选择最有可能带来高回报的行为。Q学习通过ε-贪婪策略(ε-greedy policy)来平衡探索和利用:大多数时间选择当前已知的最优行为,但以较小的概率ε探索其他行为。
代码块示例:
```python
import numpy as np
def q_learning(state, action, reward, next_state, alpha, gamma, q_table):
"""
Q-learning update rule.
Args:
state: 当前状态
action: 当前采取的行为
reward: 行为的即时奖励
next_state: 下一个状态
alpha: 学习率
gamma: 折扣因子
q_table: Q值表
"""
max_future_q = np.max(q_table[next_state])
current_q = q_table[(state, action)]
# Q学习的更新规则
new_q = (1 - alpha) * current_q + alpha * (reward + gamma * max_future_q)
q_table[(state, action)] = new_q
return q_table
```
参数说明:
- `state`:当前的状态。
- `action`:在当前状态下所采取的动作。
- `reward`:采取这个动作后获得的即时奖励。
- `next_state`:采取动作后转移到的新状态。
- `alpha`:学习率,决定了当前的Q值对新的估计值有多大的影响。
- `gamma`:折扣因子,影响对未来奖励的折现程度。
- `q_table`:当前的Q值表,用于存储每个状态-行为对的Q值。
在上述代码块中,我们实现了Q学习算法的更新规则。每当智能体完成一个状态转移并获得奖励后,这个函数就会被调用以更新Q表中的相应值。该函数需要一个Q表作为输入,Q表是一个从状态-行为对到其对应Q值的映射。
通过迭代地应用此更新规则,智能体可以学习到在给定状态采取何种行为能够获得最大的长期回报。这为强化学习的其他算法,比如策略梯度方法或值函数逼近,提供了理论基础。
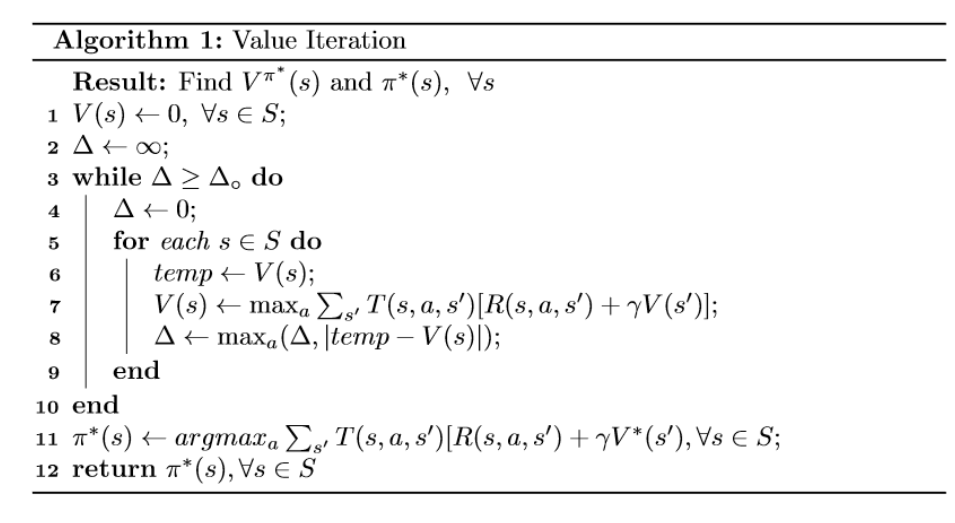
## 2.3 动态规划在强化学习中的应用
### 2.3.1 动态规划的基础
动态规划(Dynamic Programming,DP)是一种算法设计技术,用于解决多阶段决策问题。在强化学习中,动态规划提供了一种方式,可以在给定MDP模型的情况下解决策略评估和策略改进的问题。动态规划算法的核心在于利用子问题的重叠性来减少计算量,它依赖于最优子结构原理,即一个问题的最优解由其子问题的最优解构成。
在强化学习的背景下,动态规划涉及两个主要问题:
- 策略评估(Policy Evaluation):确定在给定策略下的状态值函数(或状态-行为值函数),即计算在某个策略下每个状态(或状态-行为对)的预期回报。
- 策略改进(Policy Improvement):基于当前策略评估的结果,通过改变策略来获得更高的预期回报。
### 2.3.2 DP与RL的关系和区别
虽然动态规划和强化学习在目标上相似,都旨在找到最优策略,但它们在实现和应用上有明显的不同。
动态规划要求完全知道环境的模型,也就是状态转移概率P(s'|s,a)和奖励函数R(s,a,s')。一旦环境模型已知,动态规划能够保证找到最优策略。DP算法通常使用迭代法或直接法来实现。
强化学习则不要求先验知识,它通过与环境的交互来学习策略。学习过程中,智能体逐步改进策略,并且不需要明确的环境模型。由于缺少对环境的完整知识,强化学习算法一般采用试错的方式进行学习。这些算法依赖于大量的样本数据,并且通常用函数近似或经验学习的方式来解决大规模问题。
表格展示了动态规划和强化学习之间的主要区别:
| 特征 | 动态规划 | 强化学习 |
| --- | --- | --- |
| 环境模型 | 需要 | 不需要 |
| 学习方式 | 基于模型学习 | 基于试错学习 |
| 数据需求 | 较少 | 大量 |
| 适用范围 | 适用于小规模问题 | 适用于大规模和连续问题 |
| 问题假设 | 马尔可夫性 | 马尔可夫性 |
| 收敛性 | 保证找到最优解 | 不保证找到最优解 |
动态规划算法提供了一个优雅的解决方案来计算最优策略,但它们在实际应用中通常受到状态空间大小的限制。相比之下,强化学习算法能够在较大的环境中灵活地学习策略,尽管它们可能需要更多的数据和计算资源。
在某些情况下,动态规划可以与强化学习结合使用,例如在模型预测控制(MPC)中,就可能用到DP方法来优化决策过程。理解这两种方法之间的关系和区别是十分重要的,它可以帮助我们在不同的应用和问题中选择合适的算法。
# 3. 强化学习中的实践技术与工具
## 3.1 环境模拟与搭建
在强化学习中,环境模拟与搭建是至关重要的一步,因为它为智能体提供了学习和决策的“舞台”。本章节将深入探讨如何通过OpenAI Gym等工具构建模拟环境,并演示如何创建和应用自定义环境。
### 3.1.1 使用Gym构建模拟环境
OpenAI Gym是一个用于开发和比较强化学习算法的强大工具库。它提供了一个标准的API接口,可以轻松地创建或使用现有的模拟环境。使用Gym,研究人员和开发者可以在统一的框架下,快速搭建并测试他们的算法。
```python
import gym
import time
# 创建环境
env = gym.make('CartPole-v0')
# 初始化环境
env.reset()
# 进行1000轮迭代
for i in range(1000):
# 渲染环境
env.render()
# 随机选择动作
action = env.action_space.sample()
# 执行动作并观察环境的变化
_, reward, done, _ = env.step(action)
# 如果环境终止,重新初始化
if done:
env.reset()
break
# 等待一段时间,以便于观察
time.sleep(0.01)
# 关闭环境
env.close()
```
在上述代码中,我们首先导入了`gym`库,并创建了一个名为`CartPole-v0`的环境实例。这个环境是Gym中的一个经典任务,目标是控制一个推车以保持一根杆子的平衡。之后,我们通过一系列随机动作去“玩”这个环境,并使用`env.render()`函数实时查看环境的变化。每执行一个动作,环境状态都会更新,并返回新的状态、奖励、是否结束的标志以及额外的信息。如果游戏结束(杆子倒了),环境会重置,然后我们继续游戏。最后,记得关闭环境。
### 3.1.2 自定义环境的创建和应用
Gym提供了一个接口,允许研究人员和开发者根据自己的需求创建新的环境。创建一个自定义环境需要继承`gym.Env`类,并实现必要的方法和属性。
以下是一个简单的自定义环境创建示例:
```python
import gym
from gym import spaces
import numpy as np
class CustomEnv(gym.Env):
def __init__(self):
# 环境的观测空间定义为2维向量,取值范围为[-1, 1]
self.observation_space = spaces.Box(low=-1, high=1, shape=(2,))
# 行动空间定义为离散的3个动作
self.action_space = spaces.Discrete(3)
# 环境的初始状态
self.state = np.zeros(2)
# 环境的其他参数
self.param = 1
def step(self, action):
# 根据动作更新状态
if action == 0:
self.state += np.array([0.01, self.param])
elif action == 1:
self.state -= np.array([0.01, self.param])
else:
self.state = np.zeros(2)
# 奖励函数简单设置为状态的负范数
reward = -np.linalg.norm(self.state)
# 判断是否达到终止条件
done = np.linalg.norm(self.state) > 1
# 返回状态、奖励、是否结束、额外信息(无)
return self.state, reward, done, {}
def reset(self):
# 重置状态
self.state = np.zeros(2)
return self.state
def render(self):
# 可以在这里添加渲染环境的代码
pass
def close(self):
# 关闭环境资源(如果有的话)
pass
# 注册环境
gym.envs.register(
id='CustomEnv-v0',
entry_point='path.to.CustomEnv',
)
# 创建并使用自定义环境
env = gym.make('CustomEnv-v0')
```
在这个示例中,我们定义了一个自定义环境`CustomEnv`,其中包括了定义状态空间和行动空间的方法`__init__`,执行动作并返回结果的`step`方法,环境重置的`reset`方法,渲染环境的`render`方法(可选),以及关闭环境的`close`方法。通过`gym.envs.register`方法,我们还可以将这个自定义环境注册到Gym中,使其可以像使用标准环境一样被调用。
创建自定义环境的关键是理解环境的交互机制,即智能体如何感知环境(观测空间)、如何影响环境(行动空间)、环境如何响应(奖励函数)以及何时结束交互(是否结束)。自定义环境为开发者提供了模拟实际世界问题的灵活性,有助于深入理解强化学习的工作原理。
## 3.2 深度强化学习技术
深度强化学习(Deep Reinforcement Learning,简称DRL)是强化学习与深度学习的结合,它利用深度神经网络来逼近Q函数或策略函数。这一领域的突破使得强化学习能够在具有高维观测空间的任务中表现出色,如图像识别和自然语言处理。
### 3.2.1 DQN与深度神经网络的结合
深度Q网络(Deep Q-Network,简称DQN)是由DeepMind公司提出的一种结合了深度学习的Q学习算法,它通过深度神经网络来近似最优的Q值函数。DQN使用了经验回放(Experience Replay)和目标网络(Target Network)的概念来提高训练的稳定性和收敛性。
```python
import tensorflow as tf
from tensorflow.keras import layers
from tensorflow.keras.optimizers import Adam
class DQNAgent:
def __init__(self, state_size, action_size):
# 定义状态和动作的维度
self.state_size = state_size
self.action_size = action_size
# 创建经验回放缓冲区
self.memory = []
# 初始化神经网络参数
self.gamma = 0.95 # 折扣因子
self.epsilon = 1.0 # 探索率
self.epsilon_decay = 0.995
self.epsilon_min = 0.01
self.learning_rate = 0.001
# 创建深度Q网络模型
self.model = self.build_model()
def build_model(self):
# 使用Keras构建模型结构
model = tf.keras.Sequential()
model.add(layers.Dense(24, input_dim=self.state_size, activation='relu'))
model.add(layers.Dense(24, activation='relu'))
model.add(layers.Dense(self.action_size, activation='linear'))
model.compile(loss='mse', optimizer=Adam(lr=self.learning_rate))
return model
def remember(self, state, action, reward, next_state, done):
# 将一次经历保存到经验回放缓冲区
self.memory.append((state, action, reward, next_state, done))
def act(self, state):
# 使用当前策略选择动作
if np.random.rand() <= self.epsilon:
return np.random.choice(self.action_size)
q_values = self.model.predict(state)
return np.argmax(q_values[0])
def replay(self, batch_size):
# 随机抽取一批经历进行学习
minibatch = random.sample(self.memory, batch_size)
for state, action, reward, next_state, done in minibatch:
# 计算目标Q值
target = self.model.predict(state)
if done:
target[0][action] = reward
else:
# 使用目标网络预测下一状态的Q值
target_next = self.target_model.predict(next_state)
target[0][action] = reward + self.gamma * np.amax(target_next[0])
# 训练模型
self.model.fit(state, target, epochs=1, verbose=0)
# 更新探索率和目标网络权重
if self.epsilon > self.epsilon_min:
self.epsilon *= self.epsilon_decay
# 其他代码略
# 使用DQNAgent
state_size = 4 # 示例状态空间大小
action_size = 2 # 示例动作空间大小
agent = DQNAgent(state_size, action_size)
# 其他代码略
```
在上述代码中,我们定义了一个DQNAgent类,其中包含了构建和训练深度Q网络的逻辑。该类实现了经验回放机制和目标网络,并使用了`tf.keras`来构建和编译模型。`act`方法用于在给定状态下选择动作,它结合了探索(通过`epsilon`值)和利用(通过模型预测的Q值)。`replay`方法用于在经验回放缓冲区中抽取数据,并对模型进行回放学习。
请注意,本代码片段仅作为示例,实际使用时需要完整实现所有功能,并与环境交互。DQN的实现需要仔细调参,并且通常需要大量的计算资源进行训练。
### 3.2.2 连续动作空间下的策略梯度方法
对于连续的动作空间,策略梯度方法(Policy Gradient Methods)提供了一种有效的解决方案。这类方法直接对策略进行参数化,并通过优化预期回报来训练策略网络。
策略梯度的一个常见算法是深度确定性策略梯度(Deep Deterministic Policy Gradient,简称DDPG),它结合了DQN的思想,使用了经验回放和目标网络,但主要用于连续动作空间。
```python
# DDPG算法的策略网络和价值网络的实现省略
# 使用DDPGAgent
class DDPGAgent:
def __init__(self):
# 初始化策略网络和价值网络
# ...
def act(self, state):
# 使用策略网络预测动作
# ...
def learn(self):
# 使用价值网络和经验回放进行学习
# ...
# 使用DDPGAgent
agent = DDPGAgent()
# 其他代码略
```
由于策略梯度方法在实现上相对复杂,这里仅提供了类的框架。在实际应用中,策略梯度方法通常需要实现策略网络、价值网络、目标网络和经验回放机制,以及算法的训练循环。
## 3.3 实战案例分析
### 3.3.1 从游戏到现实:使用强化学习解决实际问题
强化学习不仅在游戏领域取得了成功,它的潜在应用还包括机器人控制、自动驾驶、资源管理等多个实际领域。在本小节中,我们将探讨如何将强化学习应用到实际问题中,以及在应用过程中遇到的挑战和解决方案。
一个典型的例子是使用强化学习训练机器人完成特定任务。例如,机器人学习如何抓取一个物体,或者如何在环境中导航而不撞到障碍物。这些任务的难点在于环境的复杂性和动作的连续性。通常,这些任务的解决方案包括:
- 环境建模:创建一个准确的环境模型来模拟真实世界的物理行为,这对于训练策略至关重要。
- 奖励设计:设计一个合适的奖励函数,确保学习过程能够朝着我们期望的目标推进。
- 算法选择:根据任务的特点选择合适的强化学习算法,例如DQN、DDPG、PPO等。
- 数据收集:收集足够的训练数据来训练模型。对于复杂的环境,可能需要模拟器和真实世界的交互。
- 迁移学习:将从模拟环境中学到的知识迁移到真实世界中,这通常是解决现实问题的关键一步。
### 3.3.2 案例复盘:问题定位与解决方案
在实际应用强化学习的过程中,我们会遇到各种挑战。下面是一个解决实际问题的案例分析,帮助我们理解问题定位和解决方案。
假设我们正在尝试训练一个机器人完成“抓取物体”任务。在实验过程中,我们发现机器人在初始阶段表现不错,但随着训练的进行,它的表现不再提升,甚至开始出现随机行为。通过对训练过程的分析,我们定位到了问题所在:
- **过拟合**:机器人策略过于专门化于当前任务,没有泛化能力。
- **探索不足**:机器人过分依赖已知信息,没有足够的探索行为去发现新的策略。
- **奖励函数设计不良**:在奖励函数中引入了不正确的激励,导致机器人学习到了错误的行为。
为了应对这些问题,我们采取了以下策略:
- **引入随机性**:在策略中引入一定的随机性,鼓励探索。
- **调整奖励函数**:调整奖励函数,确保它能够正确引导学习过程。
- **使用正则化技术**:在策略训练中引入正则化项,防止过拟合。
- **模拟与现实结合**:利用模拟器进行初步训练,然后将策略迁移到真实世界中。
通过这些调整,机器人的训练表现得到了显著提升,最终成功完成了抓取物体的任务。
以上案例说明了在实际应用强化学习时,问题定位和解决方案的重要性。不断迭代和优化是强化学习取得成功的关键。
在下一章节中,我们将继续深入探讨强化学习的进阶主题,包括模型预测控制(MPC)与强化学习的结合使用,多智能体问题的挑战与机遇,以及提升算法解释性的方法和强化学习的鲁棒性设计。
# 4. 强化学习的进阶主题深入
## 模型预测控制(MPC)与强化学习
### MPC的基本原理
模型预测控制(Model Predictive Control, MPC)是一种先进的控制策略,它通过解决一个有限时间范围内的优化问题来计算当前的控制动作。MPC使用一个模型来预测未来一段时间内的系统行为,然后优化一个成本函数来确定最佳的控制序列。这些控制动作会被应用到系统上,但只有第一个控制动作会被实际执行。随后,在下一个控制周期,MPC会重新计算控制序列。
MPC的核心是预测模型、优化器和反馈校正机制。预测模型用来估计系统未来的状态,优化器基于预测和给定的性能指标来优化控制序列,反馈校正机制用于调整模型的预测以匹配实际系统行为。MPC适用于具有复杂动态和约束条件的系统,它能够处理多变量控制问题,并且具有很好的鲁棒性和适应性。
### MPC与RL的结合使用
将MPC与强化学习结合,我们可以得到一个能够自我适应的控制系统。在这一结合中,强化学习扮演了优化器的角色,通过与环境交互来调整预测模型并优化控制策略。RL使得MPC能够处理不确定性和变化的环境条件,增强系统的适应性。
一个典型的MPC结合RL的框架包括一个策略网络,它通常是一个深度神经网络,用来预测控制动作。这个策略网络会结合环境的状态输入,输出一个针对未来N步的控制序列。然后,通过实际执行第一个动作并观察结果来更新策略网络,以此实现闭环控制。
```python
import numpy as np
from scipy.optimize import minimize
# MPC伪代码示例
def mpc_control_loop(model, cost_function, current_state, N, max_iterations):
# 初始化控制序列和历史代价
control_sequence = np.zeros((N,))
best_cost = np.inf
for _ in range(max_iterations):
# 拟合当前状态到预测模型
predicted_states = model.simulate(control_sequence, current_state)
# 计算代价函数
cost = cost_function(predicted_states)
# 更新控制序列以最小化代价函数
if cost < best_cost:
best_cost = cost
control_sequence = np.array([minimize(cost_function, x0, method='SLSQP') for x0 in predicted_states.T]).T
# 更新当前状态,这里假设环境会提供下一个状态
current_state = get_next_state(current_state, control_sequence[0])
return control_sequence[0]
```
该代码段展示了一个MPC控制循环的伪代码实现。在这里,`model.simulate`代表使用模型预测未来状态的函数,`cost_function`用于计算给定状态序列的代价,`get_next_state`表示获取环境在执行特定控制动作后的下一个状态。这个过程会迭代进行,直到控制序列收敛到最佳解。
## 强化学习的多智能体问题
### 多智能体系统的挑战与机遇
在多智能体系统中,每个智能体都试图通过与环境和其他智能体的交互来优化其自身的回报。这带来了许多挑战,如非平稳性问题,因为其他智能体的行为会改变环境动态;以及协调问题,多个智能体需要有效协作才能达成共同的目标。
然而,多智能体系统也为研究和实际应用提供了机遇。例如,多智能体强化学习可以解决更广泛和复杂的问题,如交通管理和机器人协作。通过智能体之间的合作,我们可以设计出能够处理大规模并行计算问题的解决方案。
### 多智能体协作策略的设计与实现
设计和实现多智能体协作策略的关键在于智能体之间的通信与协调。通信协议必须有效且高效,以确保智能体能够共享关键信息。在强化学习中,多智能体策略可以采用集中式训练但分布式执行的策略,也就是所谓的CTDE(Centralized Training with Decentralized Execution)。
一种常见的方法是使用基于值分解的策略,它将团队回报分解为单个智能体的贡献,并使用这些分解的价值函数来指导学习。另一个方法是使用通信网络,让智能体能够交换信息,并通过通信网络来调整它们的行为。
```mermaid
flowchart TD
subgraph CTDE[CTDE框架]
Centralized[集中式训练] -->|策略| Decentralized[分布式执行]
end
subgraph 单个智能体
Agent1[智能体1]
Agent2[智能体2]
AgentN[智能体N]
end
Agent1 -.->|通信| Agent2
Agent2 -.->|通信| AgentN
AgentN -.->|通信| Agent1
Agent1 -.->|信息| Centralized
Agent2 -.->|信息| Centralized
AgentN -.->|信息| Centralized
```
上述流程图展示了CTDE框架中,单个智能体如何通过通信和信息共享来实现协作。每个智能体向集中式训练中心提供信息,并根据中心训练的策略在本地执行决策。
## 解释性与鲁棒性在强化学习中的应用
### 提升算法解释性的方法
解释性是强化学习领域中越来越受到关注的问题。提高算法的解释性可以帮助研究者更好地理解模型的决策过程,进而改进算法的性能和可靠性。
实现强化学习算法解释性的一种方法是通过可视化技术来展示学习过程中的关键特征和决策点。另一种方法是利用注意力机制,让模型在做出决策时突出重要的输入特征。
### 强化学习的鲁棒性设计
在现实世界的复杂环境中,环境的变化可能会导致学习到的策略失效。因此,设计鲁棒性强的强化学习算法至关重要。提高鲁棒性的方法包括增加环境的多样性,使得策略能够在不同的条件下都保持有效;以及引入对抗性训练,让智能体在受到干扰的情况下仍能保持性能。
设计鲁棒性的强化学习系统还涉及到策略的泛化能力,这意味着策略不仅要在训练环境下有效,还要能够在未见过的环境下工作。
```python
# 鲁棒性强化学习训练伪代码示例
def robust_reinforcement_learning(env, policy_network, training_iterations):
robustness_scores = []
for iteration in range(training_iterations):
# 生成或选择环境变化的实例
variations = sample_environment_variations(env)
for variation in variations:
# 在变化的环境中运行策略
run_policy(policy_network, variation)
# 计算鲁棒性得分
robustness_scores.append(evaluate_robustness(env))
# 更新策略网络
policy_network.update_parameters(env)
return robustness_scores
```
在此伪代码中,`sample_environment_variations`函数用于创建或采样环境的变化,`run_policy`函数在变化的环境中运行策略,`evaluate_robustness`函数评估当前策略的鲁棒性得分,最后`policy_network.update_parameters`根据当前得分更新策略网络。通过这个过程,我们可以训练出一个能够应对环境变化的鲁棒性策略。
以上内容为强化学习进阶主题深入的几个关键部分,它们为强化学习的进一步研究和应用提供了新的视角和工具。
# 5. 强化学习项目实战与未来展望
## 5.1 项目实战:构建一个强化学习应用
构建一个强化学习应用是一个复杂的过程,需要深入理解业务需求、选择合适的技术栈并遵循严格的开发流程。在这一章节中,我们将探讨如何从项目需求出发,选择合适的技术,并实施整个项目。
### 5.1.1 项目需求分析与技术选型
在开始构建强化学习应用之前,首先需要进行需求分析。需求分析的目的是明确应用的目标,包括要解决的问题、预期的结果以及可能的约束条件。例如,我们可能会构建一个自动化交易系统,其中强化学习算法用于实时优化投资组合。
技术选型是基于需求分析的结果进行的。要选择合适的强化学习框架、编程语言、以及可能的模拟环境。Python 由于其强大的数据科学和机器学习生态,通常是首选。常用的强化学习库包括 Stable Baselines、Tensorforce 和 RLLib。选择模拟环境时,可以使用 Gym 或者创建自定义环境来模拟真实世界情况。
### 5.1.2 从概念到产品:项目实施步骤
项目实施可以分为以下步骤:
1. **环境搭建:** 首先要搭建起开发和测试环境,确保所有开发人员可以使用相同的配置,这包括安装所有必要的库和依赖项。
2. **算法实现:** 根据需求,我们可能需要实现特定的强化学习算法,如 DQN、A3C 或 PPO。
3. **环境交互:** 开发代码,使得算法能够在所选环境中运行,采集数据,执行动作,并获得相应的奖励。
4. **训练与调试:** 训练强化学习模型,并且不断调整参数,如学习率、折扣因子等,以及策略,直到性能达到预期目标。
5. **测试与验证:** 在模拟环境和可能的真实环境中测试模型性能。验证模型是否能够在不同的场景下保持稳定性能。
6. **部署:** 一旦模型通过测试,就可以部署到生产环境中,开始实际的决策任务。
7. **监控与维护:** 部署后需要持续监控模型表现,对性能退化做出响应,并适时地重新训练或微调模型。
通过以上步骤,我们可以从概念阶段到开发出一个完整的强化学习应用产品。
## 5.2 强化学习的未来趋势与挑战
随着技术的不断进步,强化学习领域也呈现出许多新的趋势和挑战。
### 5.2.1 预测未来技术发展
强化学习技术的未来发展方向可能会关注以下几个方面:
- **算法的效率提升:** 新算法的设计将更加注重减少训练时间和计算资源。
- **跨领域应用:** 强化学习在医疗、金融等领域的应用会日益增加,特别是在模拟复杂决策过程方面。
- **可解释性与合规性:** 为了更广泛的应用,强化学习模型需要变得更加透明和可解释,同时遵循数据隐私和伦理标准。
### 5.2.2 当前面临的挑战与解决方案
目前强化学习面临的挑战包括:
- **样本效率:** 目前大多数强化学习算法需要大量的样本来学习,这在实际应用中很难获得。
- **稳定性和安全性:** 在某些应用场景下,模型的稳定性和安全性至关重要,而目前的算法难以保证。
- **多智能体和合作学习:** 随着应用的复杂化,如何设计多智能体系统并实现有效的合作学习成为挑战。
为应对这些挑战,研究者们正在开发新的算法和技术,如元学习(meta-learning)、基于模型的强化学习(model-based RL)和符号强化学习(symbolic RL)等。
## 5.3 个人成长路径与资源推荐
对于希望在强化学习领域深造的IT从业者,以下是一些建议的学习路径和资源。
### 5.3.1 如何系统学习强化学习
学习强化学习建议遵循以下路径:
1. **基础理论:** 学习相关的数学基础,如线性代数、概率论、优化理论等。
2. **算法原理:** 从基础的强化学习算法开始,逐步深入到高级算法。
3. **实践项目:** 通过实际项目加深理解,不断迭代提高。
4. **研究前沿:** 关注最新的研究论文和成果,持续学习最新动态。
### 5.3.2 推荐学习资源和社区
- **在线课程:** Coursera、edX 和 Udacity 提供了由顶尖大学和研究机构开设的强化学习课程。
- **书籍:** 推荐《Reinforcement Learning: An Introduction》作为入门书籍。
- **学术会议:** 关注 NeurIPS、ICML 和 ICLR 等顶级机器学习会议的强化学习相关论文。
- **在线社区:** 加入如 RL 中的Reddit论坛、Stack Overflow 等社区,和其他研究者、开发者交流。
通过以上资源和途径,强化学习的学习者可以不断积累知识和经验,为个人职业发展打下坚实的基础。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏全面深入地探讨了强化学习(RL)的各个方面,从基础概念到高级算法。它涵盖了零基础入门、算法解析、深度融合、进阶秘籍、项目管理、现实应用、框架对比和多智能体系统应用等广泛主题。专栏旨在为读者提供全面的强化学习知识,帮助他们掌握核心概念、实战技巧和进阶策略。通过深入浅出的讲解和丰富的案例分析,专栏使读者能够充分理解强化学习的原理和应用,并将其应用于现实世界中的复杂问题。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
深入解析Copley伺服驱动器核心:掌握工作原理与优化技巧
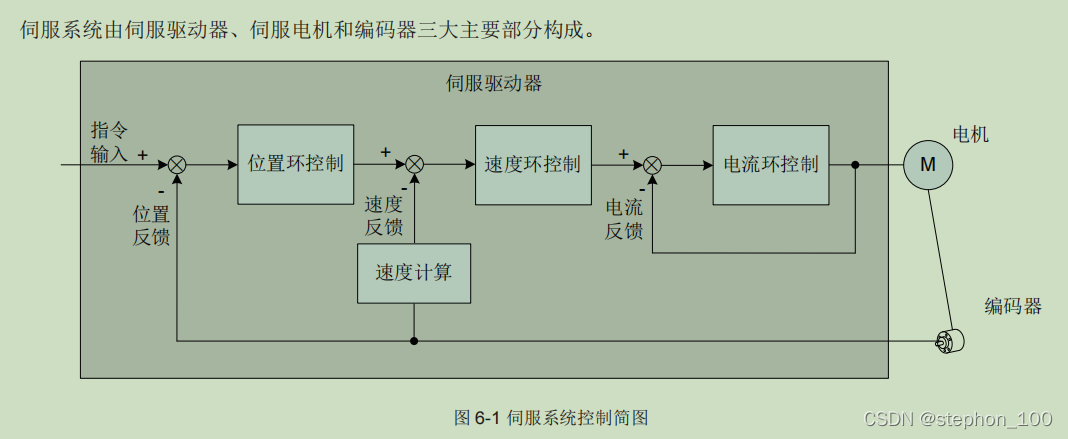
# 摘要
本文旨在全面介绍Copley伺服驱动器的技术细节、性能优化方法、实践应用以及未来的发展趋势。首先概述了伺服驱动器的基本概念和组成结构,随后
【PLC与欧姆龙E5CC无缝集成】:实现高效系统控制的策略
# 摘要
本文旨在探讨PLC(可编程逻辑控制器)基础和欧姆龙E5CC的具体应用。第一章提供了PLC与欧姆龙E5CC的背景知识介绍。第二章深入探讨了E5CC的系统集成技术,包括硬件与软件集成方法及其测试与调试过程。第三章讨论了高效控制策略的理论基础与实践应用,着重于控制理论、关键技术以及案例分析。第四章覆盖了PLC与E5CC集成的高级应用
ABB机器人维护必读:日常维护与故障排除的终极指南
# 摘要
本文全面介绍了ABB机器人的维护流程和故障排除技巧,以确保机器人在工业生产中的高效稳定运行。第一章提供ABB机器人维护的概论,概述了维护的重要性。第二章深入讲解了日常维护的细节,包括检查、清洁、润滑、软件更新与备份的标准化操作。第三章和第四章分别从基础和进阶的角度探讨了故障排除的基础知识和高级技巧,涵盖了从基本故障诊断到复杂系统性故障处理的全方位方法。最后一
编码挑战:ISE Text Editor与Notepad++中文支持对决及解决方案

# 摘要
本文首先对ISE Text Editor与Notepad++进行了基础解析,并探讨了中文编码问题的理论背景,包括字符编码的历史演变及其在中文环境下产生的特定问题。通过分析ISE Text Editor和Notepad++中的中文支持情况,文章指出了这两个编辑器在处理中文字符时所面临的显示问题及其原因,并提出了一系列针对性的解决方案。最后,本文对编码挑战的
【STM32烧录工具对比】:选型指南与性能评估的终极秘籍

# 摘要
随着嵌入式系统开发的迅速发展,STM32微控制器因其高性能和低成本受到广泛欢迎。烧录工具作为编程和调试STM32不可或缺的软件,对于开发流程的效率和质量至关重要。本文旨在概述STM32烧录工具的基础知识,并比较市场上主流的烧录工具,如ST官方的ST-LINK和第三方工具如闪龙编程器、J-Link等。文章将对这些工具的安装、性能测试和用户体验等因素进行分析,为开发者在不同应用场景下的烧录工
PL_0词法分析器设计秘籍:每一个细节都至关重要
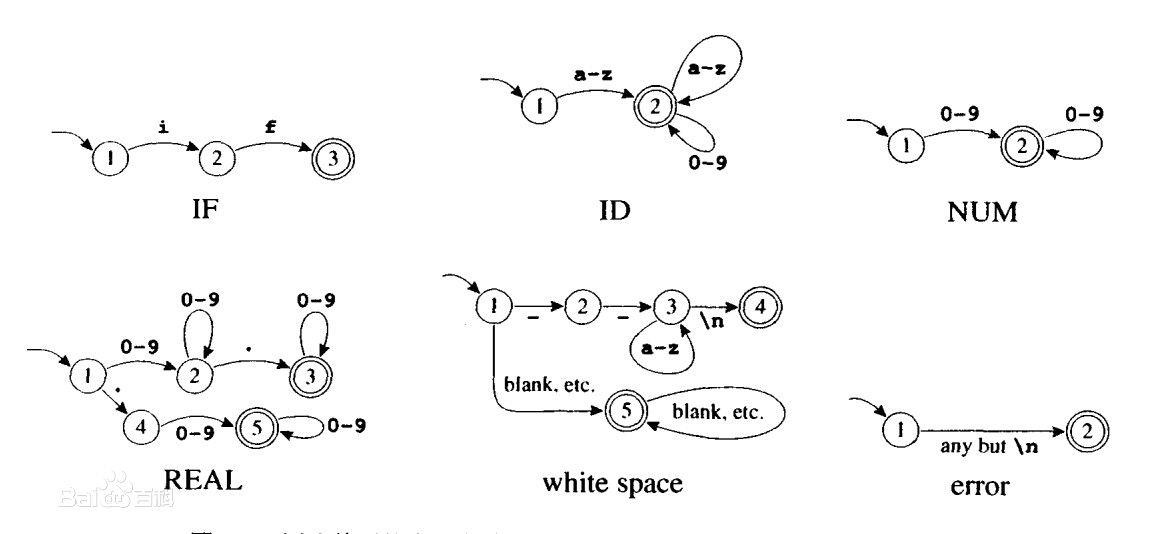
# 摘要
PL_0词法分析器是一种用于解析编程语言的工具,它在编译器前端中扮演着关键角色。本文首先概述了词法分析器的理论基础和算法选择,强调了正则文法和有限自动机的作用。接着详细介绍了PL_0词法分析器的设计与实现,包括框架搭建、具体词法单元的识别以及错误检测与报告机制的设计。文章还探讨了测试与优化策略,性能评估以及用户反馈在持续改进中的作用。此外,本文还涉及了PL_0词法分析器与其
OpenWrt动态监控
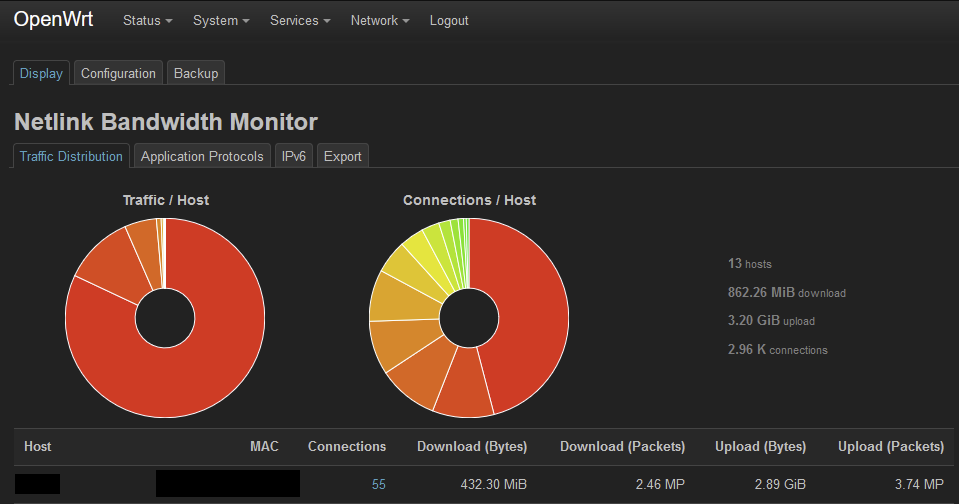
# 摘要
本文全面介绍了OpenWrt动态监控系统的设计与实践,包括基础理论、配置实践、系统集成管理以及案例分析。文章首先阐述了动态监控的必要性,网络安全挑战,以及OpenWrt系统架构与监控技术原理。随后,详细说明了通过配置监控工具Luci-RRD和数据可视化设置来实现高效监控的方法。文章进一步探讨了监控系统的集成与管理,包括与外部服务的集成、安全加固以及
【ABAQUS进阶分析】:深入探讨基准平面偏移对结果的影响

# 摘要
本文旨在介绍ABAQUS软件的基础知识,并深入探讨基准平面在有限元分析中的作用及偏移基准平面的理论与实际应用。文章首先概述了ABAQUS的基本概念和应用,随后详细分析了基准平面的定义及其重要性,并讨论了在建模、材料属性定义和分析过程中偏移基准平面的影响。通过详细的步骤解析和案例分析,本文揭示了偏移基准平面对各类分析结果的作用,并
【WinCC脚本安全】:确保运行安全性的5个要点

# 摘要
本文旨在全面概述WinCC脚本安全的相关知识,并强调其在工业控制系统中的重要性。首先介绍了WinCC脚本语言
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )