
AX-12 数字舵机资料
西北工业大学舞蹈机器人基地
5/25
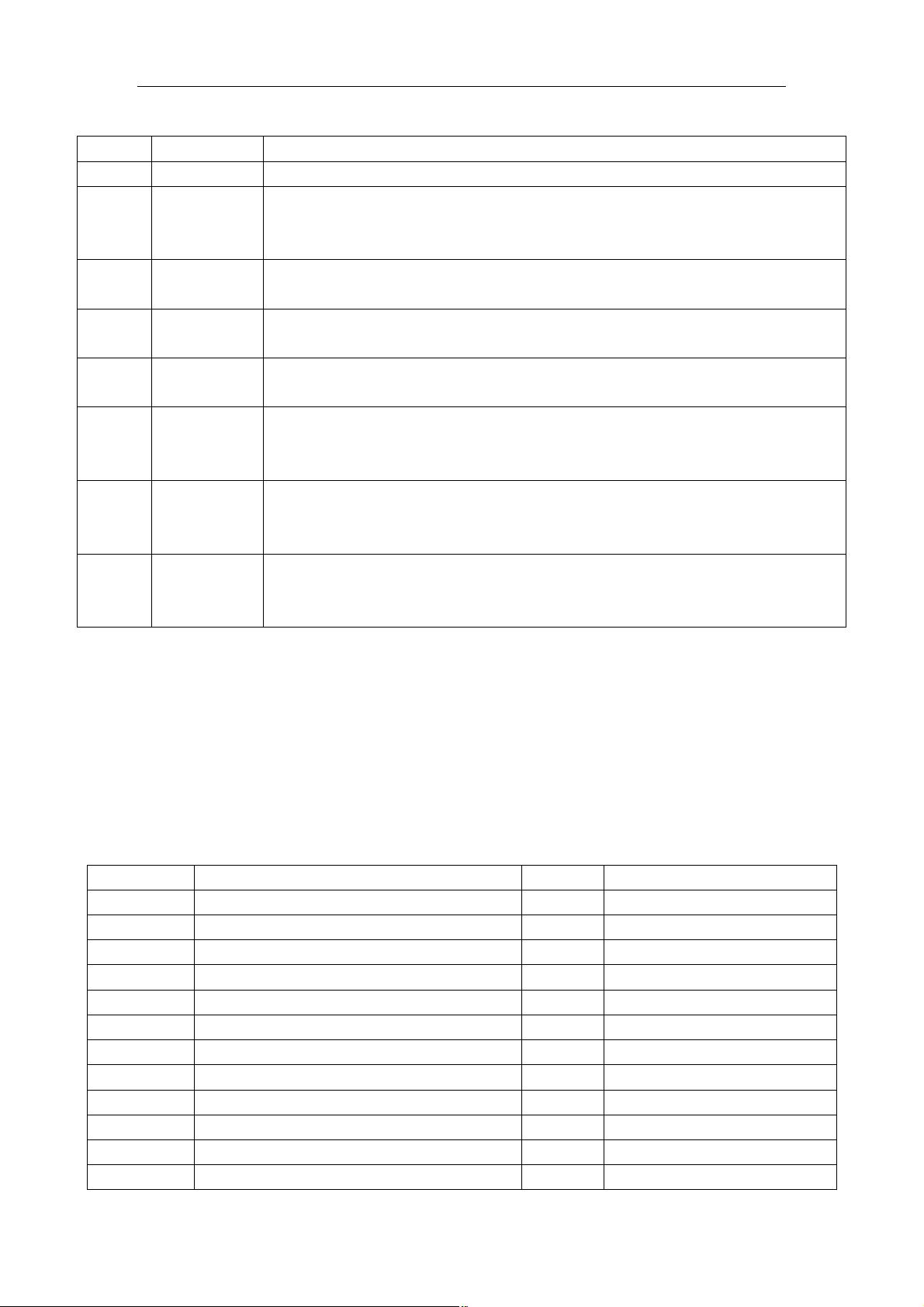
Bit Name Details
Bit 7 0 无
Bit 6
Instruction Error
命令错误
Set to 1 if an undefined instruction is sent or an action instruction is sent without a Reg_Write
instruction.
如果输出的命令没有定义或者没有通过 Reg_Write 指导,则该位设至为 1
Bit 5
Overload Error
超载错误
Set to 1 if the specified maximum torque can't control the applied load.
如果设置的最大的力矩不能承受当前负荷,则该位设至为 1
Bit 4
Checksum Error
校验和错误
Set to 1 if the checksum of the instruction packet is incorrect.
如果指令包的校验和是不正确的,则该位设至为 1
Bit 3
Range Error
范围错误
Set to 1 if the instruction sent is out of the defined range.
如果输出的指令值超出了定义的范围,则该位设至 1
Bit 2
Overheating
Error
过热错误
Set to 1 if the internal temperature of the Dynamixel unit is above the operating temperature range as
defined in the control table.
如果 Dynamixel 舵机的内部温度高于设置的最高温度,则该位设至为 1 。
Bit 1
Angle Limit
Error
角度界限错误
Set as 1 if the Goal Position is set outside of the range between CW Angle Limit and CCW Angle
Limit.
如果目标位置超出 CW 角度界限和 CCW 角度之间范围,则该位设至为 1 。
Bit 0
Input Voltage
Error
输入电压错误
Set to 1 if the voltage is out of the operating voltage range as defined in the control table.
如果当前电压超出设置的最高电压,则该位设至为 1 。
PARAMETER:0…N Used if additional information is needed.
CHECK SUM: The computation method for the ‘Check Sum’ is as the following.
Check Sum = ~ (ID + Length + Instruction + Parameter1 + ... Parameter N) If the calculated value is larger than
255, the lower byte is defined as the checksum value. ~ represents the NOT logic operation.
检查总数= ~(特征值+长度+指导+参数 1+... 叁数 N)%255.
3-4. Control Table (控制面板)
0X00-0X17: EEPROM Area ,0X18-0X31:RAM Area
Address Item Access Initial Value
0(0X00) Model Number(L) 型号代码(L) RD 12(0x0C)
1(0X01) Model Number(H) 型号代码(H) RD 0(0x00)
2(0X02) Version of Firmware 固件的版本 RD ?
3(0X03) ID 特征值 RD,WR 1(0x01)
4(0X04) Baud Rate 比特率 RD,WR 1(0x01)
5(0X05) Return Delay Time 返回延迟时间 RD,WR 250(0xFA)
6(0X06) CW Angle Limit(L) CW 角度界限(L) RD,WR 0(0x00)
7(0X07) CW Angle Limit(H)CW 角度界限(H) RD,WR 0(0x00)
8(0X08) CCW Angle Limit(L)CCW 角度界限(L) RD,WR 255(0xFF)
9(0X09) CCW Angle Limit(H)CCW 角度界限(H) RD,WR 3(0x03)
10(0x0A) (Reserved)预备 - 0(0x00)
11(0X0B) the Highest Limit Temperature 最高的界限温度 RD,WR 85(0x55)
剩余24页未读,继续阅读

fishwang89
- 粉丝: 20
- 资源: 13
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决Eclipse配置与导入Java工程常见问题
- 真空发生器:工作原理与抽吸性能分析
- 爱立信RBS6201开站流程详解
- 电脑开机声音解析:故障诊断指南
- JAVA实现贪吃蛇游戏
- 模糊神经网络实现与自学习能力探索
- PID型模糊神经网络控制器设计与学习算法
- 模糊神经网络在自适应PID控制器中的应用
- C++实现的学生成绩管理系统设计
- 802.1D STP 实现与优化:二层交换机中的生成树协议
- 解决Windows无法完成SD卡格式化的九种方法
- 软件测试方法:Beta与Alpha测试详解
- 软件测试周期详解:从需求分析到维护测试
- CMMI模型详解:软件企业能力提升的关键
- 移动Web开发框架选择:jQueryMobile、jQTouch、SenchaTouch对比
- Java程序设计试题与复习指南
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


