
TJA1145A All information provided in this document is subject to legal disclaimers. © NXP Semiconductors N.V. 2020. All rights reserved.
Product data sheet Rev. 2 — 23 September 2020 10 of 57
NXP Semiconductors
TJA1145A
High-speed CAN transceiver for partial networking
7.2 High-speed CAN transceiver
The integrated high-speed CAN transceiver is designed for active communication at bit
rates up to 1 Mbit/s, providing differential transmit and receive capability to a CAN protocol
controller. The transceiver is ISO 11898-2:2016 compliant (defining high-speed CAN with
selective wake-up functionality and autonomous bus biasing). The CAN transmitter is
supplied via pin VCC while the CAN receiver is supplied via pin BAT. The TJA1145A
includes additional timing parameters on loop delay symmetry to ensure reliable
communication in fast phase at data rates up to 5 Mbit/s, as used in CAN FD networks.
The CAN transceiver supports autonomous CAN biasing, which helps to minimize RF
emissions. CANH and CANL are always biased to 2.5 V when the transceiver is in Active
or Listen-only modes (CMC = 01/10/11).
Autonomous biasing is active in CAN Offline mode - to 2.5 V if there is activity on the bus
(CAN Offline Bias mode) and to GND if there is no activity on the bus for t > t
to(silence)
(CAN Offline mode).
This is useful when the node is disabled due to a malfunction in the microcontroller or
when CAN partial networking is enabled. The TJA1145A ensures that the CAN bus is
correctly biased to avoid disturbing ongoing communication between other nodes. The
autonomous CAN bias voltage is derived directly from V
BAT
.
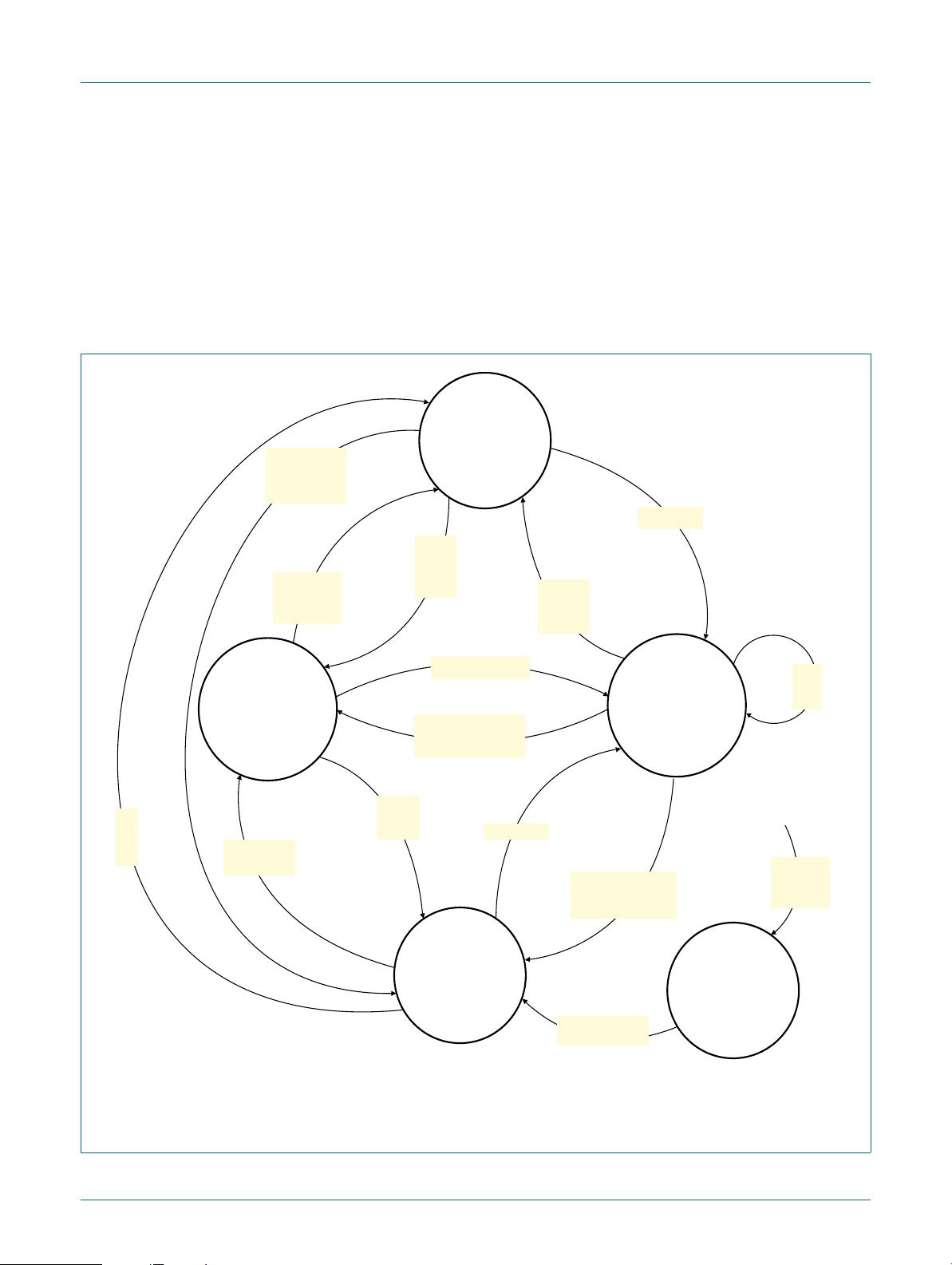
7.2.1 CAN operating modes
The integrated CAN transceiver supports four operating modes: Active, Listen-only,
Offline and Offline Bias (see
Figure 5). The CAN transceiver operating mode depends on
the TJA1145A operating mode and on the setting of bits CMC in the CAN control register
(
Tab le 7).
When the TJA1145A is in Normal mode, the CAN transceiver operating mode (Offline,
Active or Listen-only) can be selected via bits CMC in the CAN control register (
Tabl e 7).
When the TJA1145A is in Standby or Sleep modes, the transceiver is forced to Offline or
Offline Bias mode (depending on bus activity).
7.2.1.1 CAN Active mode
In CAN Active mode, the transceiver can transmit and receive data via CANH and CANL.
The differential receiver converts the analog data on the bus lines into digital data, which
is output on pin RXD. The transmitter converts digital data generated by the CAN
controller (input on pin TXD) into analog signals suitable for transmission over the CANH
and CANL bus lines.
CAN Active mode is selected when CMC = 01 or 10. When CMC = 01, V
CC
undervoltage
detection is enabled and the transceiver switches to CAN Offline or CAN Offline Bias
mode when the voltage on V
CC
drops below V
uvd(VCC)
. When CMC = 10, V
CC
undervoltage detection is disabled. The transmitter will remain active until the TJA1145A
is forced into Sleep mode by the V
CC
undervoltage event; the transceiver will then switch
to CAN Offline or CAN Offline Bias mode.
The CAN transceiver is in Active mode when:
• the TJA1145A is in Normal mode (MC = 111) and the CAN transceiver has been
enabled by setting bits CMC in the CAN control register to 01 or 10 (see
Tabl e 7) and:

剩余57页未读,继续阅读

John_Tang_
- 粉丝: 5
- 资源: 11
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 电力电子系统建模与控制入门
- SQL数据库基础入门:发展历程与关键概念
- DC/DC变换器动态建模与控制方法解析
- 市***专有云IaaS服务:云主机与数据库解决方案
- 紫鸟数据魔方:跨境电商选品神器,助力爆款打造
- 电力电子技术:DC-DC变换器动态模型与控制
- 视觉与实用并重:跨境电商产品开发的六重价值策略
- VB.NET三层架构下的数据库应用程序开发
- 跨境电商产品开发:关键词策略与用户痛点挖掘
- VC-MFC数据库编程技巧与实现
- 亚马逊新品开发策略:选品与市场研究
- 数据库基础知识:从数据到Visual FoxPro应用
- 计算机专业实习经验与项目总结
- Sparkle家族轻量级加密与哈希:提升IoT设备数据安全性
- SQL数据库期末考试精选题与答案解析
- H3C规模数据融合:技术探讨与应用案例解析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


