In-depth Analysis of STM32 Microcontroller Interrupt Mechanism: From Interrupt Vector Table to Interrupt Priority, Fully Mastering the Interrupt Mechanism
发布时间: 2024-09-14 15:38:46 阅读量: 97 订阅数: 45 

Firmware-library-of-STM32.zip_STM32 芯片手册_stm32 firmware
# In-depth Analysis of STM32 MCU Interrupt Mechanism: From Interrupt Vector Table to Priority, Mastering the Interrupt Mechanism
## 1. Fundamentals of Interrupt Mechanism**
The interrupt mechanism is a crucial aspect of microcontrollers that allows the pausing and resuming of program execution in response to external events or internal conditions. In STM32 microcontrollers, this mechanism is managed by specialized hardware modules, providing efficient and configurable interrupt handling capabilities.
**Classification of Interrupts:**
***External Interrupts:** Triggered by signals on external pins, such as button presses or sensor inputs.
***Internal Interrupts:** Triggered by internal events, such as timer overflows or completed data transmissions.
**Interrupt Handling Process:**
Upon the occurrence of an interrupt, the STM32 microcontroller halts the currently executing program and jumps to the specified Interrupt Service Routine (ISR) in the interrupt vector table. The ISR is responsible for handling the interrupt event, executing necessary operations, and then returning to the main program.
## 2. Interrupt Vector Table and Interrupt Service Routines
### 2.1 Structure of the Interrupt Vector Table
The interrupt vector table is an array that stores the entry addresses of interrupt service routines. The STM32 microcontroller's interrupt vector table is located at memory address 0x*** and contains 256 32-bit entry addresses. Each entry corresponds to an interrupt source. When this interrupt source is triggered, the CPU will jump to the corresponding entry address to execute the interrupt service routine.
The structure of the interrupt vector table is as follows:
| Interrupt Source | Entry Address |
|---|---|
| Reset | 0x*** |
| NMI | 0x*** |
| Hard Fault | 0x0000 000C |
| MemManage | 0x*** |
| BusFault | 0x*** |
| UsageFault | 0x*** |
| SVC | 0x0000 001C |
| DebugMon | 0x*** |
| PendSV | 0x*** |
| SysTick | 0x*** |
| ... | ... |
### 2.2 Writing Interrupt Service Routines
An interrupt service routine is the code segment that responds to an interrupt request. The writing of interrupt service routines must follow these rules:
- Interrupt service routines must be declared with `__attribute__((interrupt))` to indicate that the function is an interrupt handler.
- Interrupt service routines must have a parameter, which is the interrupt source number.
- Interrupt service routines must be declared with `__attribute__((naked))` to indicate that the function has no prologue or epilogue.
- Interrupt service routines must use assembly instructions `push` and `pop` to save and restore registers.
- Interrupt service routines must use the assembly instruction `bl` to call C language functions.
Here is an example of an interrupt service routine:
```c
__attribute__((interrupt))
void USART1_IRQHandler(void)
{
__attribute__((naked))
{
// Save registers
push({r0, r1, r2, r3, r12, lr})
// Call C language function to handle interrupt
bl USART1_IRQHandler_C
// Restore registers
pop({r0, r1, r2, r3, r12, lr})
// Return to the interrupt vector table
bx lr
}
}
```
In the C language function `USART1_IRQHandler_C`, the specific interrupt handling logic can be written.
## 3.1 Setting Interrupt Priority
STM32 microcontroller interrupt priorities are divided into 16 levels, with level 0 being the highest priority and level 15 being the lowest. Interrupt priorities can be set via the NVIC registers.
**NVIC Register Structure**
```c
typedef struct {
__IO uint32_t ISER[8]; /* Interrupt Set Enable Register */
__IO uint32_t ICER[8]; /* Interrupt Clear Enable Register */
__IO uint32_t ISPR[8]; /* Interrupt Set Pending Register */
__IO uint32_t ICPR[8]; /* Interrupt Clear Pending Register */
__IO uint32_t IABR[8]; /* Interrupt Active Bit Register */
__IO uint8_t IP[80]; /* Interrupt Priority Register (80 interrupts) */
__IO uint32_t STIR; /* Software Trigger Interrupt Register */
} NVIC_TypeDef;
```
**Setting Interrupt Priority Code**
```c
/* Set interrupt priority */
NVIC_SetPriority(IRQn_Type IRQn, uint32_t priority);
/* Get interrupt priority */
uint32_t NVIC_GetPriority(IRQn_Type IRQn);
```
**Parameter Description**
***IRQn:** Interrupt number
***priority:** Priority level, ranging from 0 to 15
**Code Logic**
* The `NVIC_SetPriority()` function sets the interrupt priority of the specified interrupt number to the specified priority.
* The `NVIC_GetPriority()` function retrieves the interrupt priority of the specified interrupt number.
### 3.2 Interrupt Nesting Management
The STM32 microcontroller supports interrupt nesting, meaning a lower priority interrupt can be interrupted by a higher priority one during its handling. Interrupt nesting can be managed via the NVIC registers.
**NVIC Register Structure**
```c
typedef struct {
__IO uint32_t ISER[8]; /* Interrupt Set Enable Register */
__IO uint32_t ICER[8]; /* Interrupt Clear Enable Register */
__IO uint32_t ISPR[8]; /* Interrupt Set Pending Register */
__IO uint32_t ICPR[8]; /* Interrupt Clear Pending Register */
__IO uint32_t IABR[8]; /* Interrupt Active Bit Register */
__IO uint8_t IP[80]; /* Interrupt Priority Register (80 interrupts) */
__IO uint32_t STIR; /* Software Trigger Interrupt Register */
__IO uint32_t ICER[4]; /* Interrupt Clear Enable Register */
__IO uint32_t ISPR[4]; /* Interrupt Set Pending Register */
__IO uint32_t ICPR[4]; /* Interrupt Clear Pending Register */
__IO uint32_t IABR[4]; /* Interrupt Active Bit Register */
__IO uint8_t IP[24]; /* Interrupt Priority Register (24 interrupts) */
} NVIC_Type;
```
**Interrupt Nesting Management Code**
```c
/* Set interrupt nesting */
NVIC_SetPriorityGrouping(uint32_t priorityGrouping);
/* Get interrupt nesting */
uint32_t NVIC_GetPriorityGrouping();
```
**Parameter Description**
***priorityGrouping:** Priority grouping, ranging from 0 to 7
**Code Logic**
* The `NVIC_SetPriorityGrouping()` function sets the priority grouping for interrupt nesting. The priority grouping determines the allocation of interrupt priorities and subpriorities.
* The `NVIC_GetPriorityGrouping()` function retrieves the priority grouping for interrupt nesting.
## 4. Interrupt Response and Service
### 4.1 Interrupt Response Process
When an interrupt event occurs, the STM32 microcontroller executes the following interrupt response process:
1. **Interrupt Request Detection:** The interrupt controller detects an interrupt request signal and determines the interrupt source.
2. **Interrupt Vector Table Lookup:** The interrupt controller looks up the corresponding interrupt service routine entry address in the interrupt vector table based on the interrupt source address.
3. **Program Counter Update:** The program counter (PC) is updated to the interrupt service routine entry address, beginning the execution of the interrupt service routine.
4. **Interrupt Masking:** The interrupt controller masks the current interrupt source to prevent the same interrupt from triggering again during the execution of the interrupt service routine.
5. **Interrupt Flag Clearing:** The interrupt controller clears the interrupt source's interrupt flag bit, indicating that the interrupt event has been handled.
### 4.2 Interrupt Service Process
The interrupt service routine is the code segment that responds to interrupt events and typically includes the following steps:
1. **Save Registers:** At the beginning of the interrupt service routine, save the register values of the current program state, including the program counter (PC), stack pointer (SP), and general-purpose registers (R0-R15).
2. **Handle Interrupt Event:** Depending on the interrupt source, execute the corresponding processing logic, such as reading input data, updating state variables, or sending data.
3. **Restore Registers:** At the end of the interrupt service routine, restore the previously saved register values to resume the program state before the interrupt.
4. **Interrupt Return:** Execute an interrupt return instruction (RET) to update the program counter to the address before the interrupt occurred, continuing the execution of the main program.
### Code Example
The following code example demonstrates an interrupt service routine:
```c
// Interrupt service routine
void SysTick_Handler(void) {
// Save registers
__asm volatile("push {r0-r3, r12}");
// Handle interrupt event
// ...
// Restore registers
__asm volatile("pop {r0-r3, r12}");
// Interrupt return
__asm volatile("bx lr");
}
```
### Flowchart
The following diagram illustrates the interrupt response and service process:
```mermaid
sequenceDiagram
participant MCU
participant Interrupt Controller
MCU->Interrupt Controller: Interrupt Request
Interrupt Controller->MCU: Interrupt Vector Table Lookup
MCU->Interrupt Controller: Program Counter Update
Interrupt Controller->MCU: Interrupt Masking
Interrupt Controller->MCU: Interrupt Flag Clearing
MCU->Interrupt Controller: Interrupt Service Routine Entry
MCU->Interrupt Controller: Register Saving
MCU->Interrupt Controller: Interrupt Event Handling
MCU->Interrupt Controller: Register Restoring
MCU->Interrupt Controller: Interrupt Return
```
## 5. Applications of Interrupt Mechanism in STM32 Microcontrollers
### 5.1 Application of External Interrupts
**5.1.1 Introduction to External Interrupts**
External interrupts are a mechanism by which STM32 microcontrollers receive external events through external pins. They allow the microcontroller to trigger interrupt responses upon detecting changes in external signals. External interrupts can be classified into two types: rising-edge triggered and falling-edge triggered.
**5.1.2 Configuration of External Interrupts**
Configuring external interrupts involves the following steps:
1. **Enable Clock:** Enable the clock for the GPIO port where the external interrupt pin is located.
2. **Configure GPIO Pin:** Set the external interrupt pin to input mode and select the trigger type (rising edge or falling edge).
3. **Configure NVIC:** Enable the external interrupt in the NVIC and set the priority.
**5.1.3 External Interrupt Service Routine**
The external interrupt service routine is a function that responds to external interrupt events. It typically includes the following steps:
1. **Read Interrupt Flag Bit:** Read the external interrupt flag bit to determine the pin that triggered the interrupt.
2. **Clear Interrupt Flag Bit:** Clear the external interrupt flag bit to allow subsequent interrupt events to trigger.
3. **Execute Interrupt Handling:** Perform operations related to the interrupt event.
### 5.2 Application of Timer Interrupts
**5.2.1 Introduction to Timer Interrupts**
Timer interrupts are periodic interrupts generated by the timer peripherals of STM32 microcontrollers. They allow the microcontroller to trigger interrupt responses at specific time intervals. Timer interrupts can be used to implement various functions, such as timing, counting, and pulse-width modulation.
**5.2.2 Configuration of Timer Interrupts**
Configuring timer interrupts involves the following steps:
1. **Enable Clock:** Enable the clock for the timer peripheral.
2. **Configure Timer:** Set the timer's operating mode, clock source, and count value.
3. **Configure NVIC:** Enable the timer interrupt in the NVIC and set the priority.
**5.2.3 Timer Interrupt Service Routine**
The timer interrupt service routine is a function that responds to timer interrupt events. It typically includes the following steps:
1. **Read Interrupt Flag Bit:** Read the timer interrupt flag bit to determine the timer that triggered the interrupt.
2. **Clear Interrupt Flag Bit:** Clear the timer interrupt flag bit to allow subsequent interrupt events to trigger.
3. **Execute Interrupt Handling:** Perform operations related to the timer interrupt event.
### 5.3 Application of Serial Communication Interrupts
**5.3.1 Introduction to Serial Communication Interrupts**
Serial communication interrupts are receive and transmit interrupts generated by the serial peripheral of STM32 microcontrollers. They allow the microcontroller to trigger interrupt responses when data is received or transmission is completed. Serial communication interrupts can be used to implement various functions, such as data transfer, debugging, and communication.
**5.3.2 Configuration of Serial Communication Interrupts**
Configuring serial communication interrupts involves the following steps:
1. **Enable Clock:** Enable the clock for the serial peripheral.
2. **Configure Serial Interface:** Set the serial interface's operating mode, baud rate, and data format.
3. **Configure NVIC:** Enable the serial communication interrupt in the NVIC and set the priority.
**5.3.3 Serial Communication Interrupt Service Routine**
The serial communication interrupt service routine is a function that responds to serial communication interrupt events. It typically includes the following steps:
1. **Read Interrupt Flag Bit:** Read the serial communication interrupt flag bit to determine the event that triggered the interrupt (receive or transmit).
2. **Clear Interrupt Flag Bit:** Clear the serial communication interrupt flag bit to allow subsequent interrupt events to trigger.
3. **Execute Interrupt Handling:** Perform operations related to the serial communication interrupt event, such as receiving data or transmitting data.
## 6. Optimization and Debugging of Interrupt Mechanism**
### 6.1 Interrupt Optimization Strategies
Interrupt optimization aims to improve interrupt response speed and system efficiency. Main strategies include:
- **Reduce the code volume in interrupt service routines:** Only execute necessary tasks and avoid redundant operations.
- **Use interrupt priorities:** Set interrupt priorities reasonably to ensure that important interrupts are responded to first.
- **Use interrupt nesting:** Allow high-priority interrupts to interrupt low-priority ones to increase response speed.
- **Use DMA (Direct Memory Access):** Offload data transfers from the CPU to the DMA controller to reduce CPU overhead.
- **Use interrupt grouping:** Group related interrupts for easier management and optimization.
### ***
***mon techniques include:
- **Use a debugger:** Set breakpoints, step through execution, and trace the interrupt response and service process.
- **Use a logic analyzer:** Capture interrupt signals and analyze timing and trigger conditions.
- **Use printf output:** Output debug information in the interrupt service routine to understand interrupt triggering and execution.
- **Use interrupt flag registers:** Check the interrupt flag registers to determine the interrupt source and status.
- **Use interrupt priority registers:** Check the interrupt priority settings to ensure they are correctly configured.

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【OV5640驱动开发秘籍】:一步步带你搞定摄像头模块集成
# 摘要
本文全面探讨了OV5640摄像头模块的驱动开发和集成应用。首先介绍了摄像头模块的基本概念和驱动开发的基础知识,包括摄像头驱动的分类和组成、Linux内核中的V4L2框架以及OV5640与V4L2框架的接口。接着深入到实践层面,详细阐述了驱动代码的编写、调试,图像捕获与预处理方法,以及驱动性能优化的策略。在高级功能实现章节,分析了自动曝光、对焦控制以及多摄像头同步与切换等技术。最后,文章讨论了OV5640驱动集成到系统的过程,包括应用层接口和SDK开发,以及实际应用案例分析。未来展望部分讨论了摄像头驱动开发的行业趋势、技术革新以及持续集成与测试的重要性。
# 关键字
OV5640摄像
揭秘反模糊化算法:专家如何选择与实现最佳策略
# 摘要
反模糊化算法作为处理模糊逻辑输出的重要手段,在决策支持系统、模式识别、图像处理和控制系统等领域具有广泛应用。本文综述了反模糊化算法的理论基础,探讨了其不同实现技术及性能调优方法,并通过实战案例分析,具体阐述了反模糊化算法的应用效果。同时,本文还展望了反模糊化算法的创新方向和未来技术趋势,旨在为相关领域的研究者和实践者提供理论指导和实践建议。
# 关键字
反模糊化算法;模糊逻辑;决策支持系统;图像处理;控制系统;深度学习
参考资源链
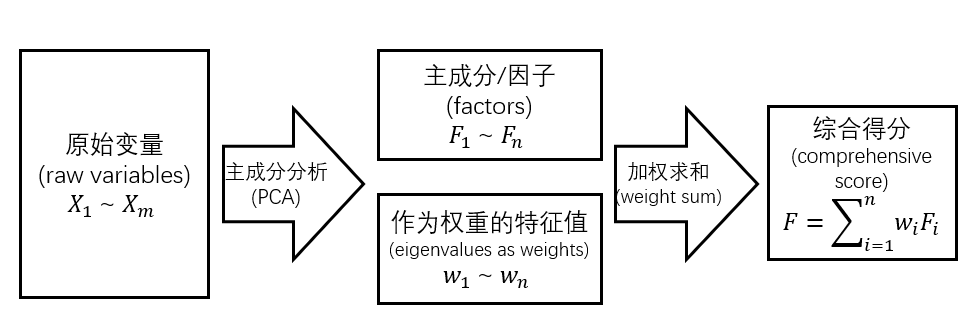
主成分分析(PCA)与Canoco 4.5:掌握数据降维技术,提高分析效率
# 摘要
主成分分析(PCA)是一种广泛应用于数据分析的降维技术,其理论基础涉及数学原理,如数据变异性的重要性及主成分的提取。本文全面探讨了PCA在数据分析中的应用,包括降噪处理、数据可视化和解释。通过实际案例研究,如生物多样性分析,展现了PCA的强大功能。同时,文章介绍了Canoco 4.5软件,专门用于生态数据分析,并提供了操作流程。最后,PCA与其他分析方法的比较及未来发展趋势被讨论,特别是在
条件语句大师课:用Agilent 3070 BT-BASIC提升测试逻辑

# 摘要
本文详细介绍了条件语句的基本理论和实践应用,探讨了其在测试逻辑中的关键作用,包括单一条件判断、多条件组合以及参数和变量的使用。文章进一步阐述了条件语句的优化策略,并深入讨论了其在自动化测试和复杂测试逻辑开发中的高级应用。通过分析Agilent 3070 BT-BASIC测试仪的使用经验,本文展示了如何创造性地应用条件语句进行高效的测试逻辑设计。最后,本文通过典型工业测试案例分析条件语句的实际效果,并对未来条
TetraMax实战案例解析:提升电路验证效率的测试用例优化策略
# 摘要
随着集成电路设计复杂性的增加,电路验证变得尤为关键,而测试用例优化在其中扮演了至关重要的角色。TetraMax作为一款先进的电路验证工具,不仅在理论基础层面提供了对测试用例优化的深入理解,而且在实际应用中展示出显著的优化效果。本文首先介绍了TetraMax的概况及其在电路验证中的应用,随后深入探讨了测试用例优化的基础理论和实际操作方法,包括测试用例的重要性、优化目标、评估
从原理图到PCB:4选1多路选择器的布局布线实践
# 摘要
本文详细介绍了4选1多路选择器的设计与实现过程,从设计概述到原理图设计、PCB布局、布线技术,最后到测试与调试,全面覆盖了多路选择器的开发流程。在原理图设计章节,本文深入分析了多路选择器的功能结构、电路原理以及绘制原理图时使用工具的选择与操作。在PCB布局设计部分,论述了布
【界面革新】SIMCA-P 11.0版用户体验提升:一次点击,数据洞察升级
# 摘要
本文系统地介绍了SIMCA-P 11.0版的界面革新和技术演进。作为一款前沿的数据洞察软件,SIMCA-P 11.0不仅在用户界面设计上实现了革新,提供了更为直观和高效的用户体验,同时也在数据可视化和报告生成功能上实现了显著的增强。新版本的个性化定制选项和数据安全性策略进一步提升了用户的工作效率和安全系数。通过深入分析数据洞察的理论基础,本文阐述了数据洞察在现代企业中的关键作用及其技术发展趋势。案例分析显示SIMCA-P 11.0在工业自动
【系统评估】:IMS信令性能监控及关键指标解读
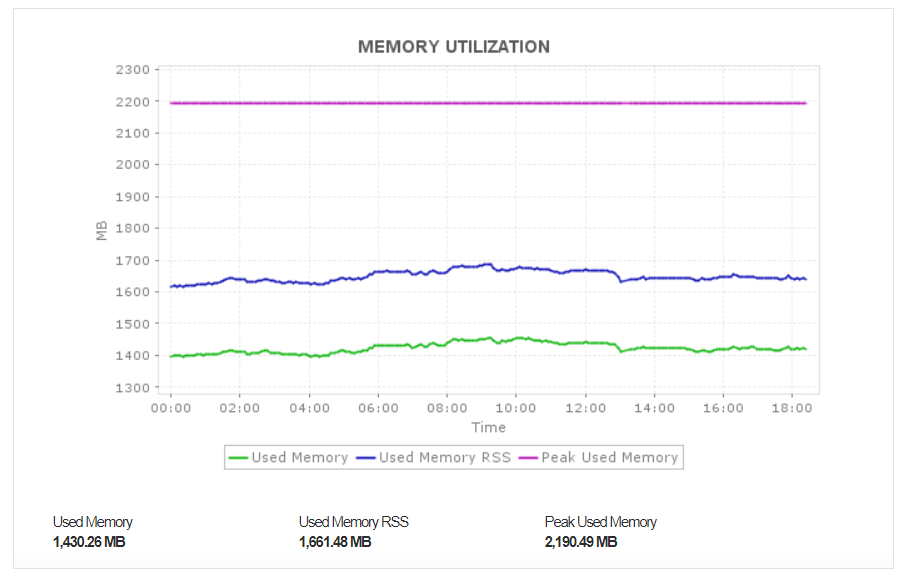
# 摘要
随着IMS(IP多媒体子系统)技术的不断演进,其信令性能监控的重要性日益凸显。本文综述了IMS信令的性能监控,首先介绍了IMS信令的基础架构和关键性能指标(KPI)的定义,然后深入探讨了性能监控的实践方法,包括监控工具的使用、数据的分析处理以及性能问题的诊断与处理。接着,文章重点论述了性能优化策略,涉及信令流量管理、KPI优化以及性能监控系统的改进。最后,通过对典型案
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )