STM32 Microcontroller Motor Control Bible: In-depth Analysis of Motor Drive, PID Control, and Motion Control, Mastering Motor Operation
发布时间: 2024-09-14 15:54:13 阅读量: 36 订阅数: 40 

SCM-stepper-motor-control-system.rar_motor control_步进电机
# STM32 Microcontroller Motor Control Bible: In-depth Analysis of Motor Drive, PID Control, and Motion Control, Mastering Motor Operation
## 1. Motor Drive Principles and STM32 Implementation
### 1.1 Basic Concepts of Motor Drive
- Types and operating principles of motors
- The role and classification of motor drivers
### 1.2 STM32 Motor Drive Hardware Interfaces
- STM32 motor drive-related peripherals (such as TIM, PWM)
- Peripheral configuration and pin mapping
### 1.3 STM32 Motor Drive Software Implementation
- Controlling motor drive peripherals using HAL or LL libraries
- Implementing motor drive algorithms (e.g., PWM modulation)
## 2. PID Control Theory and STM32 Application
### 2.1 PID Control Principles
#### 2.1.1 PID Algorithm
The PID (Proportional-Integral-Derivative) control is a closed-loop control algorithm widely used in motor control, temperature control, and other fields. Its basic principle is to calculate the control variable based on the error signal (the difference between the target value and the actual value) to adjust the output of the controlled object, bringing it closer to the target value.
The mathematical expression of the PID algorithm is:
```python
u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt
```
Where:
- `u(t)`: Control variable
- `e(t)`: Error signal
- `Kp`: Proportional gain
- `Ki`: Integral gain
- `Kd`: Derivative gain
**Proportional gain (Kp)**: The control variable is proportional to the error signal. Increasing Kp can improve the system's response speed, but too high can cause system instability.
**Integral gain (Ki)**: The control variable is proportional to the integral of the error signal. Increasing Ki can eliminate steady-state errors, but too high can cause the system's response to be slow.
**Derivative gain (Kd)**: The control variable is proportional to the derivative of the error signal. Increasing Kd can improve the system's stability, but too high can cause system oscillation.
#### ***
***mon tuning methods include:
- **Ziegler-Nichols method**: Estimate the initial values of PID parameters based on the step response curve of the controlled object.
- **Trial and error method**: Adjust PID parameters repeatedly and observe the system's response until a satisfactory result is achieved.
- **Genetic algorithm**: Use a genetic algorithm to optimize PID parameters and improve system performance.
### 2.2 STM32 PID Control Software Implementation
#### 2.2.1 PID Control Algorithm Porting
STM32 provides a rich library of functions that can easily implement the PID control algorithm. Among them, the `stm32f4xx_hal_pid.h` header file provides relevant functions for PID controllers.
```c
#include "stm32f4xx_hal_pid.h"
// Initialize the PID controller
PID_HandleTypeDef pid;
// Set PID parameters
pid.Kp = 1.0;
pid.Ki = 0.01;
pid.Kd = 0.001;
// Calculate the control variable
float u = PID_Calc(&pid, error);
```
#### 2.2.2 Online PID Parameter Tuning
To improve system robustness, online PID parameter tuning can be implemented. STM32 provides the `stm32f4xx_hal_pid_ex.h` header file, which supports online PID parameter tuning.
```c
#include "stm32f4xx_hal_pid_ex.h"
// Set PID parameter tuning algorithm
pid.auto_mode = PID_AUTOMODE_ENABLED;
// Update PID parameters
PID_AutoTune_Enable(&pid);
```
## 3. Motion Control Technology and STM32 Practice
### 3.1 Basic Concepts of Motion Control
Motion control refers to controlling the motor's movement to achieve the desired position, speed, or acceleration. It is widely used in industrial automation, robotics technology, and consumer electronics. Motion control technology mainly分为 into position control and speed control.
#### 3.1.1 Position Control
The goal of position control is to precisely control the motor's actual position to the desired position. The basic principle is to obtain the motor's actual position through feedback sensors (such as encoders or Hall sensors), then compare it with the desired position to generate an error signal. The error signal is processed by the PID controller to output the control signal that drives the motor, gradually bringing the motor's actual position closer to the desired position.
#### 3.1.2 Speed Control
The goal of speed control is to precise

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【5G网络与用户体验的终极融合】:揭秘UXM-5G手册中的10大必知技巧

# 摘要
随着5G技术的快速演进,用户对网络体验的期望也在不断提升。本文首先介绍5G网络基础及用户体验的演变,随后详细探讨了5G技术与用户体验管理之间的关系,包括网络切片、毫米波通信、MIMO与大规模天线技术等关键技术,以及用户体验管理的基本原理和5G对用户体验的影响。文章接着探讨了用户体验管理工具与实践,并通过案例研究提供了实施策略和分析。第四章重点讨论了网络优化与用户体验提
内存SPD刷写:新手到专家的20个实用技巧

# 摘要
本文详细介绍了内存SPD刷写的基础知识、操作流程、进阶应用和案例分析。首先,概述了内存SPD的结构与作用,及其刷写工具的选择和安装步骤。随后,通过实践操作部分,探讨了刷写内存SPD的详细流程,包括读取、修改和应用SPD参数,以及刷写过程中的问题应对策略。进阶应用章节深入探讨了频率与时序的调整技巧,特殊内存类型SPD刷写技术,以及长期维护与监控的重要方法。最后,通
【银行系统架构设计】:模型驱动开发的实践指南,打造高效架构
# 摘要
本文探讨了银行系统架构的设计与实现,首先介绍了银行系统架构的基本概念和模型驱动开发(MDA)的基础知识,包括核心概念、理论支撑及开发流程。随后,文章结合MDA方法详细阐述了银行系统架构设计的实践过程,包括需求分析、系统架构模型设计、模型验证与优化。接下来,文章重点分析了实
【正弦波生成全攻略】:用51单片机和TLC5615轻松打造信号
# 摘要
本文系统地阐述了正弦波生成的基础知识、在51单片机和TLC5615 DAC上的应用,并提出了具体的实现算法。文章首先介绍了正弦波的理论基础以及数字信号处理的相关概念,随后深入探讨了利用直接数字频率合成(DDS)原理生成正弦波的算法,以及这些算法如何在51单片机上通过C语言实现。此外,本文还涵盖了正弦波信号输出的硬件电路设计、调试过程和性能优化策略。最后,文章通过正弦波信号发生器的设计案例,探讨了正弦波生成技术的高级应用与未来发展趋势,包括频率和幅度调制及与其他传感器模块的集成。
# 关键字
正弦波生成;51单片机;TLC5615;数字信号处理;直接数字频率合成(DDS);频率调制
编程新手必学:用C++高效实现RAW图像到RGB的转换技术
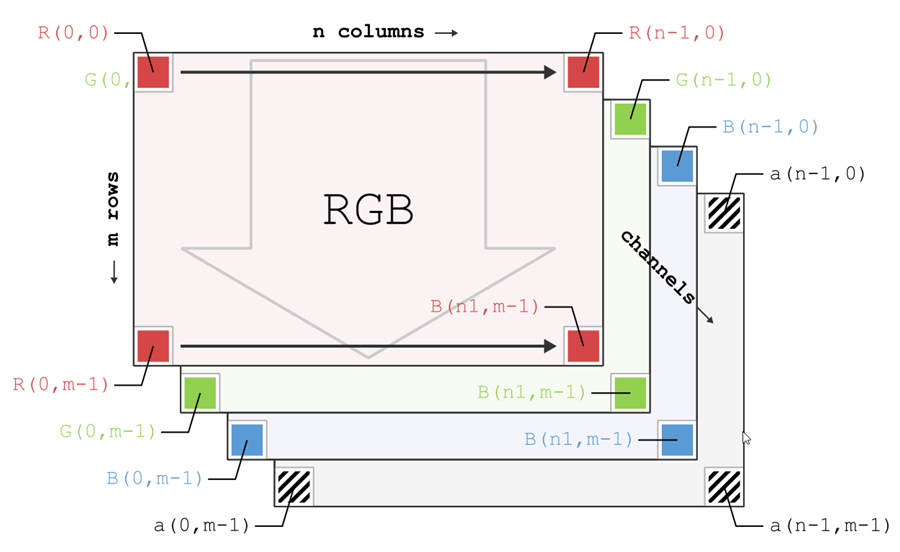
# 摘要
随着数字摄影技术的快速发展,C++语言因其高效性能而成为处理RAW图像格式的首选。本文首先介绍了RAW图像格式的基础知识和数据结构,随后探讨了C++中可用的图像处理库和工具。深入分析了RAW到RGB颜色空间转换的理论基础和实践案例,重点介绍了利用OpenCV库进行颜色转换的代码示例及优化技巧。最后,本文探讨了调试和性能优化的实战方法
【软件实施精要】:成本控制与数据迁移策略
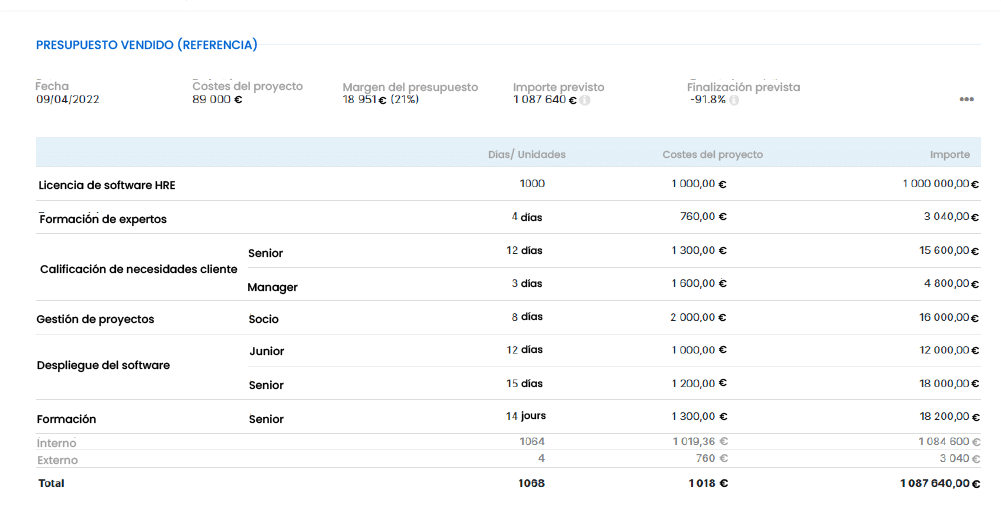
# 摘要
本文旨在探讨软件实施项目管理中的成本控制艺术与数据迁移的理论及实践操作。通过分析成本预测与预算管理、成本节约策略、以及风险评估方法,本文揭示了在软件项目中实现成本效率与资源优化的多种途径。数据迁移部分则深入讲解了从理论框架到实战操作的全面流程,强调了数据迁移的重要性、方法论、以及质量保证的重要性。此外,本文还分享了具体案例分析,并讨论了未来趋势,包括云计算和大数据背景下的数
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )