Demystifying STM32 Microcontroller Programming: From Beginner to Expert, Simplify Your Journey in the Microcontroller World
发布时间: 2024-09-14 15:36:51 阅读量: 39 订阅数: 22 

Demystifying-Dynamic-Programming:收集了我已经解决的所有动态编程问题和解决方案
**Unveiling STM32 Microcontroller Programming: From Beginner to Expert, Empowering You to Master the Microcontroller World**
# 1. Introduction to STM32 Microcontrollers and Fundamentals**
The STM32 microcontroller is a 32-bit microcontroller series launched by STMicroelectronics, based on the ARM Cortex-M core, featuring high performance, low power consumption, and a wealth of peripherals. It is widely used in embedded systems, industrial control, the Internet of Things, and other fields.
**1.1 Classification of STM32 Microcontrollers**
STM32 microcontrollers are categorized into various series based on different cores, peripherals, and packages, such as STM32F1, STM32F4, STM32L4, etc. Each series contains multiple models to meet diverse application requirements.
**1.2 STM32 Microcontroller Architecture**
STM32 microcontrollers employ the Harvard architecture, featuring separate instruction and data memories, enhancing execution efficiency. The core architecture includes:
- Cortex-M core: Responsible for executing program instructions.
- Peripherals: Including GPIO, timers, ADC, etc., providing a wealth of functionalities.
- Clock system: Providing a stable clock source, ensuring the system's normal operation.
# 2. Fundamental of STM32 Microcontroller Programming
The foundation of STM32 microcontroller programming is the cornerstone of STM32 microcontroller development, covering C language basics, STM32 microcontroller architecture, and more.
### 2.1 C Language Fundamentals
C language is the primary language for STM32 microcontroller programming. Mastering the basics of C language is crucial for understanding and writing STM32 microcontroller programs.
#### ***
***mon C language data types include:
- Integer types: int, short, long
- Floating-point types: float, double
- Character type: char
- Boolean type: bool
Variables are containers for storing data. Use keywords like `int`, `float` to declare variables and specify variable names. For example:
```c
int age = 25;
float pi = 3.14;
```
#### 2.1.2 Operators and Expressions
Opera***mon C language operators include:
- Arithmetic operators: +, -, *, /
- Relational operators: ==, !=, >, <
- Logical operators: &&, ||, !
Expressions can be used to calculate values or test conditions, for example:
```c
int result = 10 + 20;
if (result > 30) {
// Execute some operations
}
```
#### ***
***mon flow control statements include:
- if-else statement: Execute different blocks of code based on conditions
- switch-case statement: Execute different blocks of code based on various cases
- while loop: Repeat a block of code until a condition is false
- for loop: Repeat a block of code a specified number of times or while a condition holds
Flow control statements can implement logical judgments and loop operations in programs, for example:
```c
if (temperature > 30) {
// Take cooling measures if the temperature is too high
} else {
// If the temperature is normal, continue running
}
```
### 2.2 STM32 Microcontroller Architecture
Understanding the STM32 microcontroller architecture is helpful for efficiently utilizing the microcontroller's resources.
#### 2.2.1 Core Architecture and Peripherals
The STM32 microcontroller employs the ARM Cortex-M core, providing powerful computing capabilities. Furthermore, STM32 microcontrollers integrate a wealth of on-chip peripherals, including:
- GPIO: General-purpose input/output pins
- Timers: Used for generating timed interrupts and pulse width modulation (PWM)
- ADC: For converting analog signals into digital signals
- DAC: For converting digital signals into analog signals
- USART: For serial communication
- I2C: For communicating with I2C devices
#### 2.2.2 Clocks and Reset
The clock provides the timing signals necessary for the STM32 microcontroller'***mon clock sources include:
- Internal High-Speed Clock (HSI)
- Internal Low-Speed Clock (LSI)
- External Clock (HSE)
***mon reset types include:
- Power-On Reset (POR)
- Brown-Out Reset (BOR)
- Software Reset
#### 2.2.3 Interrupts and Exceptions
Interrupts and exceptions are mechanisms by which the STM32 microcontroller handles external events and internal errors.
- Interrupts: When an external event occurs (such as an external pin interrupt), the Interrupt Service Routine (ISR) is triggered for execution.
- Exceptions: When an internal error occurs (such as a division by zero error), the Exception Handler is triggered for execution.
The interrupt and exception mechanisms can promptly process events and errors, ensuring the program's stable operation.
# 3.1 GPIO Programming
GPIO (General-Purpose Input/Output ports) is a crucial peripheral in STM32 microcontrollers, used for controlling external devices and reading external signals. GPIO programming mainly involves pin configuration and interrupt handling.
#### 3.1.1 GPIO Pin Configuration
GPIO pin configuration mainly includes setting the pin mode, output type, and pull-up/pull-down resistors.
**Code Block:**
```c
/* Configure GPIOA's PA0 pin as an output mode, push-pull output, no pull-up/pull-down resistors */
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Pin = GPIO_PIN_0;
GPIO_InitStructure.Mode = GPIO_MODE_OUT_PP;
GPIO_InitStructure.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStructure);
```
**Logical Analysis:**
* The `GPIO_InitTypeDef` structure is used to configure GPIO pins.
* `GPIO_InitStructure.Pin` specifies the pin to be configured, which is PA0 in this case.
* `GPIO_InitStructure.Mode` specifies the pin mode, which is output mode (`GPIO_MODE_OUT_PP`).
* `GPIO_InitStructure.Pull` specifies the pull-up/pull-down resistor, which is no pull-up/pull-down resistor (`GPIO_NOPULL`).
* The `HAL_GPIO_Init()` function initializes the GPIO pin based on the configuration structure.
#### 3.1.2 GPIO Interrupt Handling
GPIO interrupt handling allows the microcontroller to respond promptly to changes in external signals.
**Code Block:**
```c
/* Configure GPIOA's PA0 pin as an input mode, with pull-up resistor, and enable interrupt */
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Pin = GPIO_PIN_0;
GPIO_InitStructure.Mode = GPIO_MODE_IN_PU;
GPIO_InitStructure.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStructure);
/* Enable GPIOA's PA0 pin interrupt */
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
```
**Logical Analysis:**
* `GPIO_InitStructure.Mode` specifies the pin mode, which is input mode (`GPIO_MODE_IN_PU`).
* `GPIO_InitStructure.Pull` specifies the pull-up/pull-down resistor, which is a pull-up resistor (`GPIO_PULLUP`).
* The `HAL_NVIC_EnableIRQ()` function enables the GPIOA's PA0 pin interrupt.
**Interrupt Service Function:**
```c
void EXTI0_IRQHandler(void)
{
/* Clear the interrupt flag */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
/* Handle the interrupt event */
// ...
}
```
**Logical Analysis:**
* The `HAL_GPIO_EXTI_IRQHandler()` function clears the interrupt flag.
* The interrupt service function can handle the interrupt event, such as reading external signal values or performing other operations.
# 4. Advanced Applications of STM32 Microcontrollers
### 4.1 Real-Time Operating System (RTOS)
#### 4.1.1 Introduction and Application of RTOS
**Real-Time Operating System (RTOS)** is an operating system designed specifically for embedded systems. It has the following characteristics:
- **Real-time capability:** RTOS can ensure the system responds to events within a specified time, meeting the real-time requirements of embedded systems.
- **Concurrency:** RTOS allows multiple tasks to run simultaneously, improving the system's throughput and efficiency.
- **Resource Management:** RTOS provides resource management mechanisms, such as task scheduling, memory management, and device management, simplifying embedded system development.
RTOS is widely used in various embedded systems, such as industrial control, medical equipment, automotive electronics, and aerospace.
#### 4.1.2 Porting and Usage of FreeRTOS
**FreeRTOS** is a popular open-source RTOS with the following advantages:
- **Compact and efficient:** The FreeRTOS kernel is very small, making it suitable for resource-constrained embedded systems.
- **Portability:** FreeRTOS can be ported to various hardware platforms, including STM32 microcontrollers.
- **Rich features:** FreeRTOS offers a wealth of features, such as task management, queues, semaphores, and timers.
**Porting FreeRTOS to STM32 microcontrollers** involves the following steps:
1. **Download the FreeRTOS kernel:** Obtain the FreeRTOS kernel files suitable for STM32 microcontrollers from the FreeRTOS official website.
2. **Create a project:** Use the STM32 development environment to create a new project and add FreeRTOS kernel files.
3. **Configure FreeRTOS:** Configure FreeRTOS settings based on system requirements, such as the number of tasks, stack size, and clock frequency.
4. **Create tasks:** Create task functions and add them to the FreeRTOS task queue.
5. **Start FreeRTOS:** Call the FreeRTOS startup function to begin the RTOS scheduling.
### 4.2 Network Communication
#### 4.2.1 Principles of Ethernet Communication
**Ethernet** is a local area network technology that connects devices using Ethernet cables or fiber optics and transmits data using Ethernet frames.
**Ethernet frames** include the following fields:
- **Preamble:** Used to synchronize the receiver.
- **Destination address:** The MAC address of the receiving device.
- **Source address:** The MAC address of the sending device.
- **Type:** Specifies the data type within the frame.
- **Data:** User data.
- **Frame Check Sequence (FCS):** Used to detect errors during data transmission.
#### 4.2.2 STM32 Microcontroller Ethernet Programming
STM32 microcontrollers integrate Ethernet MAC and PHY modules, supporting Ethernet communication.
**Programming STM32 microcontrollers for Ethernet communication** involves the following steps:
1. **Configure Ethernet peripherals:** Configure Ethernet MAC and PHY modules, setting the MAC address, IP address, and subnet mask.
2. **Create Ethernet tasks:** Create task functions to handle Ethernet events, such as receiving and sending data.
3. **Send and receive data:** Use Ethernet APIs to send and receive data frames.
### 4.3 Graphical User Interface (GUI)
#### 4.3.1 Basic Principles of GUI
**Graphical User Interface (GUI)** is a human-computer interaction interface that uses graphical elements (such as buttons, menus, and text boxes) to interact with users.
**The basic principles of GUI** are as follows:
- **Event handling:** GUI receives user input events, such as mouse clicks and keyboard input.
- **Window management:** GUI manages multiple windows, each containing different graphical elements.
- **Graphics drawing:** GUI uses graphics libraries to draw graphical elements, such as buttons, menus, and text boxes.
- **Layout management:** GUI uses layout managers to manage the position and size of graphical elements.
#### 4.3.2 STM32 Microcontroller GUI Programming
STM32 microcontrollers can implement GUI functionality by connecting an external LCD display and a touchscreen.
**Programming STM32 microcontrollers for GUI** involves the following steps:
1. **Select a GUI library:** Choose a GUI library suitable for STM32 microcontrollers, such as STemWin or uGUI.
2. **Initialize the GUI:** Initialize the GUI library, configure the display and touchscreen.
3. **Create GUI elements:** Create GUI elements such as buttons, menus, and text boxes.
4. **Handle events:** Register event handling functions to process user input events.
5. **Update the GUI:** Update the GUI display content based on user input.
# 5.1 Smart Home Control System
### 5.1.1 System Requirement Analysis
**Functional requirements:**
- Control household appliances such as lights, curtains, and air conditioners.
- Remotely monitor the home status, such as temperature and humidity, window, and door status.
- Support voice control and mobile app control.
**Non-functional requirements:**
- **Real-time response:** The system should respond quickly.
- **Reliability:** The system must be stable and reliable to avoid failures.
- **Ease of use:** The system operation interface should be simple and easy to use.
### 5.1.2 Hardware Design and Implementation
**Hardware architecture:**
- STM32 microcontroller as the main control chip
- Sensors: Temperature and humidity sensor, door magnetic sensor
- Actuators: Relay, motor driver
- Communication modules: Wi-Fi module, Bluetooth module
**Hardware connections:**
- STM32 microcontroller connected to sensors and actuators via GPIO
- Wi-Fi module and Bluetooth module connected to STM32 microcontroller via UART or SPI
### 5.1.3 Software Development and Debugging
**Software architecture:**
- Operating system: FreeRTOS
- Tasks: Sensor data acquisition task, actuator control task, communication task
- Interrupts: Sensor interrupt, communication interrupt
**Software implementation:**
- Sensor data acquisition task: Periodically collects temperature, humidity, and window and door status.
- Actuator control task: Controls household appliances based on user instructions or sensor data.
- Communication task: Processes Wi-Fi and Bluetooth communication, receiving user instructions and sending device status.
**Debugging:**
- Use serial debugging tools for debugging.
- Use a logic analyzer to analyze signals.
- Use an emulator for single-step debugging.

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【软件管理系统设计全攻略】:从入门到架构的终极指南
# 摘要
随着信息技术的飞速发展,软件管理系统成为支持企业运营和业务创新的关键工具。本文从概念解析开始,系统性地阐述了软件管理系统的需求分析、设计、数据设计、开发与测试、部署与维护,以及未来的发展趋势。重点介绍了系统需求分析的方法论、系统设计的原则与架构选择、数据设计的基础与高级技术、以及质量保证与性能优化。文章最后
【硬盘修复的艺术】:西数硬盘检测修复工具的权威指南(全面解析WD-L_WD-ROYL板支持特性)
# 摘要
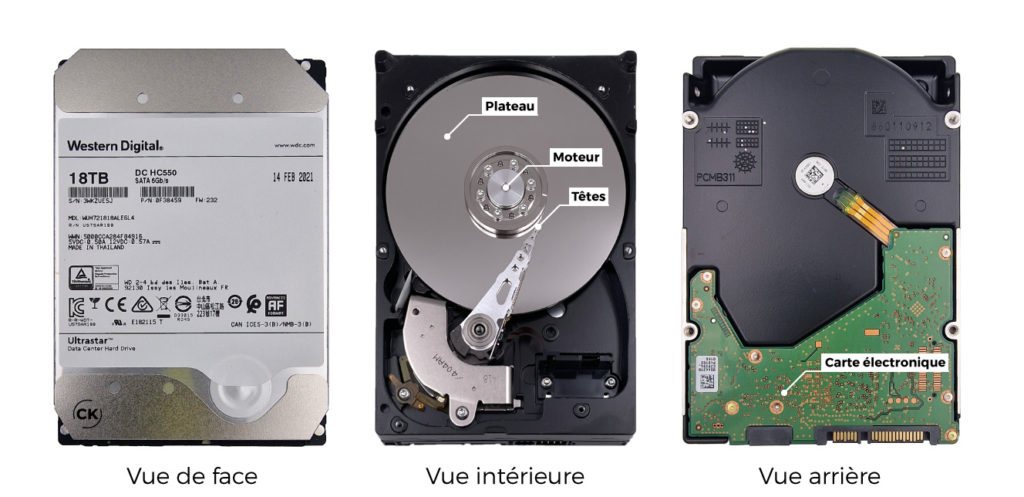
本文深入探讨了硬盘修复的基础知识,并专注于西部数据(西数)硬盘的检测修复工具。首先介绍了西数硬盘的内部结构与工作原理,随后阐述了硬盘故障的类型及其原因,包括硬件与软件方面的故障。接着,本文详细说明了西数硬盘检测修复工具的检测和修复理论基础,以及如何实践安装、配置和
【sCMOS相机驱动电路信号完整性秘籍】:数据准确性与稳定性并重的分析技巧

# 摘要
本文针对sCMOS相机驱动电路信号完整性进行了系统的研究。首先介绍了信号完整性理论基础和关键参数,紧接着探讨了信号传输理论,包括传输线理论基础和高频信号传输问题,以及信号反射、串扰和衰减的理论分析。本文还着重分析了电路板布局对信号完整性的影响,提出布局优化策略以及高速数字电路的布局技巧。在实践应用部分,本文提供了信号完整性测试工具的选择,仿真软件的应用,
能源转换效率提升指南:DEH调节系统优化关键步骤
# 摘要
能源转换效率对于现代电力系统至关重要,而数字电液(DEH)调节系统作为提高能源转换效率的关键技术,得到了广泛关注和研究。本文首先概述了DEH系统的重要性及其基本构成,然后深入探讨了其理论基础,包括能量转换原理和主要组件功能。在实践方法章节,本文着重分析了DEH系统的性能评估、参数优化调整,以及维护与故障排除策略。此外,本文还介绍了DEH调节系统的高级优化技术,如先进控制策略应用、系统集成与自适应技术,并讨论了节能减排的实现方法。最后,本文展望了DEH系统优化的未来趋势,包括技术创新、与可再生能源的融合以及行业标准化与规范化发展。通过对DEH系统的全面分析和优化技术的研究,本文旨在为提
【AT32F435_AT32F437时钟系统管理】:精确控制与省电模式

# 摘要
本文系统性地探讨了AT32F435/AT32F437微控制器中的时钟系统,包括其基本架构、配置选项、启动与同步机制,以及省电模式与能效管理。通过对时钟系统的深入分析,本文强调了在不同应用场景中实现精确时钟控制与测量的重要性,并探讨了高级时钟管理功能。同时,针对时钟系统的故障预防、安全机制和与外围设备的协同工作进行了讨论。最后,文章展望了时
【MATLAB自动化脚本提升】:如何利用数组方向性优化任务效率
# 摘要
本文深入探讨MATLAB自动化脚本的构建与优化技术,阐述了MATLAB数组操作的基本概念、方向性应用以及提高脚本效率的实践案例。文章首先介绍了MATLAB自动化脚本的基础知识及其优势,然后详细讨论了数组操作的核心概念,包括数组的创建、维度理解、索引和方向性,以及方向性在数据处理中的重要性。在实际应用部分,文章通过案例分析展示了数组方向性如何提升脚本效率,并分享了自动化
现代加密算法安全挑战应对指南:侧信道攻击防御策略
# 摘要
侧信道攻击利用信息泄露的非预期通道获取敏感数据,对信息安全构成了重大威胁。本文全面介绍了侧信道攻击的理论基础、分类、原理以及实际案例,同时探讨了防御措施、检测技术以及安全策略的部署。文章进一步分析了侧信道攻击的检测与响应,并通过案例研究深入分析了硬件和软件攻击手段。最后,本文展望了未来防御技术的发展趋势,包括新兴技术的应用、政策法规的作用以及行业最佳实践和持续教育的重要性。
# 关键字
侧信道攻击;信息安全;防御措施;安全策略;检测技术;防御发展趋势
参考资源链接:[密码编码学与网络安全基础:对称密码、分组与流密码解析](https://wenku.csdn.net/doc/64
【科大讯飞语音识别技术完全指南】:5大策略提升准确性与性能
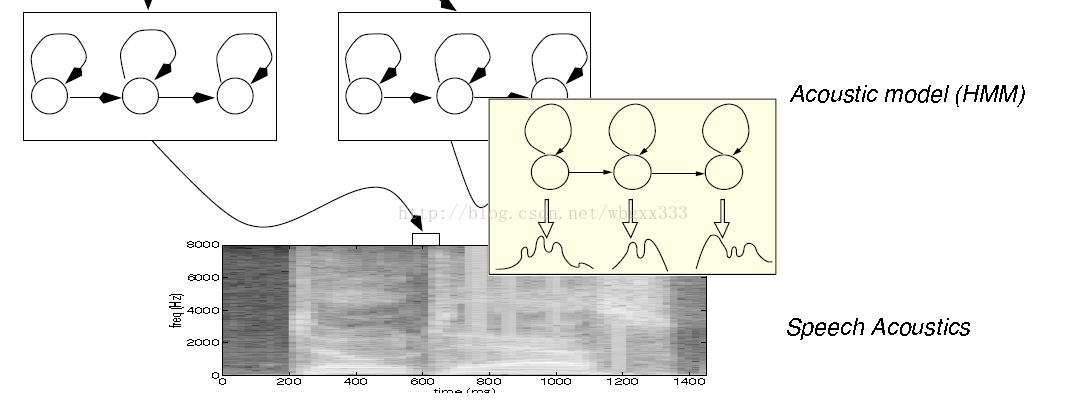
# 摘要
本论文综述了语音识别技术的基础知识和面临的挑战,并着重分析了科大讯飞在该领域的技术实践。首先介绍了语音识别技术的原理,包括语音信号处理基础、自然语言处理和机器学习的应用。随
【现场演练】:西门子SINUMERIK测量循环在多样化加工场景中的实战技巧
# 摘要
本文旨在全面介绍西门子SINUMERIK测量循环的理论基础、实际应用以及优化策略。首先概述测量循环在现代加工中心的重要作用,继而深入探讨其理论原理,包括工件测量的重要性、测量循环参数设定及其对工件尺寸的影响。文章还详细分析了测量循环在多样化加工场景中的应用,特别是在金属加工和复杂形状零件制造中的挑战,并提出相应的定制方案和数据处理方法。针对多轴机床的测量循环适配,探讨了测量策略和同步性问题。此外,本文还探讨了测量循环的优化方法、提升精确度的技巧,以及西门子SINUMERIK如何融合新兴测量技术。最后,本文通过综合案例分析与现场演练,强调了理论与实践的结合,并对未来智能化测量技术的发展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )