STM32 Microcontroller SPI Communication Secret: Detailed Explanation of SPI Protocol, Configuration, and Application, Easily Achieving High-Speed Data Transfer
发布时间: 2024-09-14 15:46:29 阅读量: 34 订阅数: 34 
# STM32 Microcontroller SPI Communication Secrets: Elucidating the SPI Protocol, Configuration, and Applications for Effortless High-Speed Data Transfer
## 1. Overview of SPI Communication
SPI (Serial Peripheral Interface) is a high-speed, full-duplex synchronous communication protocol widely used for connecting microcontrollers to peripheral devices. This section will introduce the basic concepts of SPI communication, including its operating principles, advantages, and application areas.
SPI communication uses a master-slave model where the master device controls the communication process and sends clock signals, while slave devices respond to the master's requests and send or receive data. The SPI protocol supports various data formats and communication modes, making it suitable for a wide range of applications.
## 2. SPI Protocol and STM32 Configuration
### 2.1 Basics of the SPI Protocol
SPI (Serial Peripheral Interface) is a synchronous serial communication protocol used for data exchange between host devices and peripheral devices. It uses four wires: Serial Clock (SCLK), Master Out Slave In (MOSI), Master In Slave Out (MISO), and Chip Select (CS).
The timing of SPI communication is controlled by the SCLK line, which defines the speed and direction of data transfer. The MOSI line is used by the host device to send data, and the MISO line is used by the slave device to send data. The CS line is used to select a specific slave device for communication.
SPI protocol has four different modes determined by two parameters, CPOL (Clock Polarity) and CPHA (Clock Phase). CPOL defines whether the SCLK line is at a high or low level when idle, while CPHA defines whether data is sampled on the rising or falling edge of the SCLK line.
### 2.2 STM32 SPI Hardware Structure
STM32 microcontrollers have dedicated SPI peripherals that support all four SPI modes. The SPI peripheral consists of the following registers:
- **CR1**: Control register used to configure SPI mode, data size, and clock speed.
- **CR2**: Control register used to configure interrupts, DMA transfers, and NSS pin mode.
- **SR**: Status register used to indicate SPI status, data transfer completion, and errors.
- **DR**: Data register used for sending and receiving data.
### 2.3 SPI Configuration and Initialization
To configure and initialize the STM32 SPI peripheral, follow these steps:
1. **Clock Configuration**: Enable the SPI peripheral clock.
2. **Pin Configuration**: Configure the SPI pins (SCLK, MOSI, MISO, CS).
3. **SPI Mode Configuration**: Configure the SPI mode (CPOL, CPHA), data size, and clock speed.
4. **Interrupt Configuration**: Configure SPI interrupts if necessary.
5. **DMA Configuration**: Configure SPI DMA transfers if necessary.
**Code Example:**
```c
// Initialize SPI peripheral
void SPI_Init(void) {
// Enable SPI clock
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);
// Configure SPI pins
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// Configure SPI mode
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
SPI_Init(SPI1, &SPI_InitStructure);
// Enable SPI peripheral
SPI_Cmd(SPI1, ENABLE);
}
```
**Logical Analysis:**
***RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);**: Enable SPI1 peripheral clock.
***GPIO_Init(GPIOA, &GPIO_InitStructure);**: Configure SPI pins (SCLK, MOSI, MISO).
***SPI_Init(SPI1, &SPI_InitStructure);**: Configure SPI mode, data size, and clock speed.
***SPI_Cmd(SPI1, ENABLE);**: Enable SPI1 peripheral.
## 3. SPI Communication in Practice
### 3.1 SPI Data Transfer Process
SPI data transfer follows a master-slave model, initiated by the master device and responded to by the slave device. The data transfer process is as follows:
1. **Master device sends clock signal**: The master device outputs clock signals via the SCK pin to control the speed and synchronization of data transfer.
2. **Master device sends data**: The master device sends data via the MOSI pin, sending one bit of data per clock cycle.
3. **Slave device receives data**: The slave device receives data via the MISO pin, receiving one bit of data per clock cycle.
4. **Slave device sends data (optional)**: If the communication mode is full-duplex, the slave device can also send data via the MISO pin, and the master device receives it via the MOSI pin.
### 3.2 SPI Communication Modes and Data Formats
SPI communication supports different modes and data formats to meet various application needs.
**SPI Modes:**
- **Mode 0**: CPOL=

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
时间序列分析的置信度应用:预测未来的秘密武器
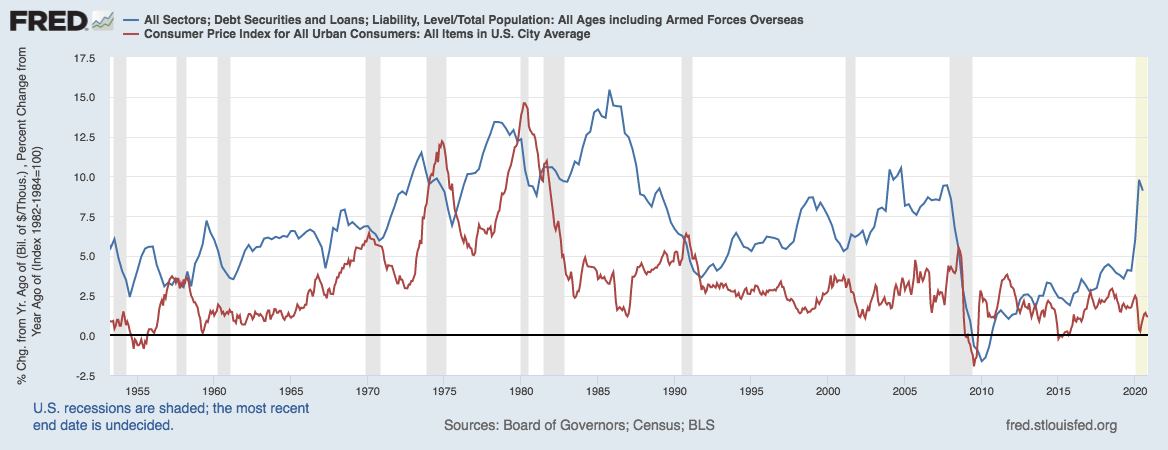
# 1. 时间序列分析的理论基础
在数据科学和统计学中,时间序列分析是研究按照时间顺序排列的数据点集合的过程。通过对时间序列数据的分析,我们可以提取出有价值的信息,揭示数据随时间变化的规律,从而为预测未来趋势和做出决策提供依据。
## 时间序列的定义
时间序列(Time Series)是一个按照时间顺序排列的观测值序列。这些观测值通常是一个变量在连续时间点的测量结果,可以是每秒的温度记录,每日的股票价
机器学习模型验证:自变量交叉验证的6个实用策略
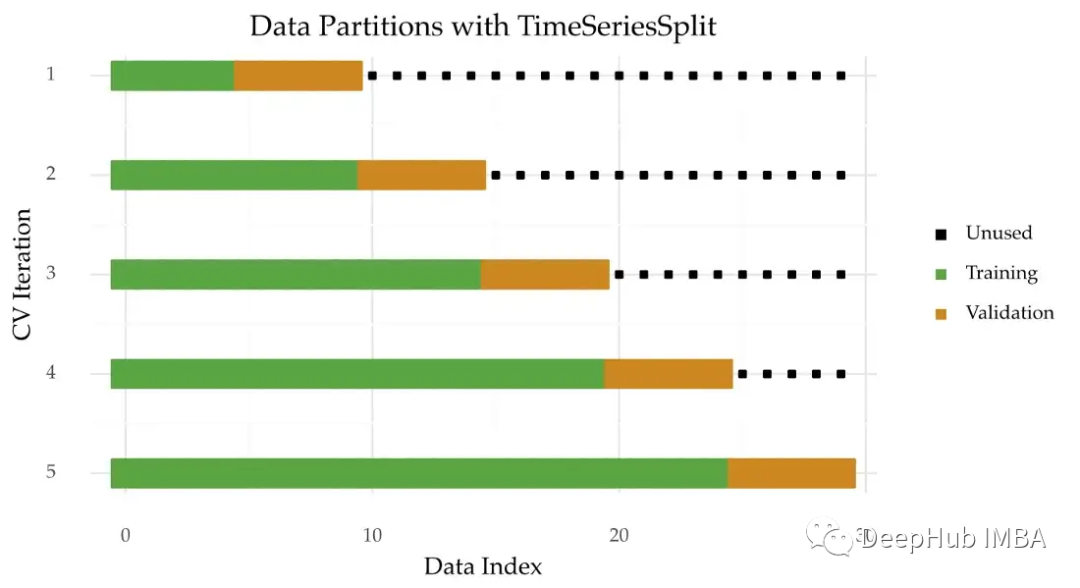
# 1. 交叉验证在机器学习中的重要性
在机器学习和统计建模中,交叉验证是一种强有力的模型评估方法,用以估计模型在独立数据集上的性能。它通过将原始数据划分为训练集和测试集来解决有限样本量带来的评估难题。交叉验证不仅可以减少模型因随机波动而导致的性能评估误差,还可以让模型对不同的数据子集进行多次训练和验证,进而提高评估的准确性和可靠性。
## 1.1 交叉验证的目的和优势
交叉验证
探索与利用平衡:强化学习在超参数优化中的应用
# 1. 强化学习与超参数优化的交叉领域
## 引言
随着人工智能的快速发展,强化学习作为机器学习的一个重要分支,在处理决策过程中的复杂问题上显示出了巨大的潜力。与此同时,超参数优化在提高机器学习模型性能方面扮演着关键角色。将强化学习应用于超参数优化,不仅可实现自动化,还能够通过智能策略提升优化效率,对当前AI领域的发展产生了深远影响。
## 强化学习与超参数优化的关系
强化学习能够通过与环境的交互来学
贝叶斯优化:智能搜索技术让超参数调优不再是难题
# 1. 贝叶斯优化简介
贝叶斯优化是一种用于黑盒函数优化的高效方法,近年来在机器学习领域得到广泛应用。不同于传统的网格搜索或随机搜索,贝叶斯优化采用概率模型来预测最优超参数,然后选择最有可能改进模型性能的参数进行测试。这种方法特别适用于优化那些计算成本高、评估函数复杂或不透明的情况。在机器学习中,贝叶斯优化能够有效地辅助模型调优,加快算法收敛速度,提升最终性能。
接下来,我们将深入探讨贝叶斯优化的理论基础,包括它的工作原理以及如何在实际应用中进行操作。我们将首先介绍超参数调优的相关概念,并探讨传统方法的局限性。然后,我们将深入分析贝叶斯优化的数学原理,以及如何在实践中应用这些原理。通过对
【生物信息学中的LDA】:基因数据降维与分类的革命
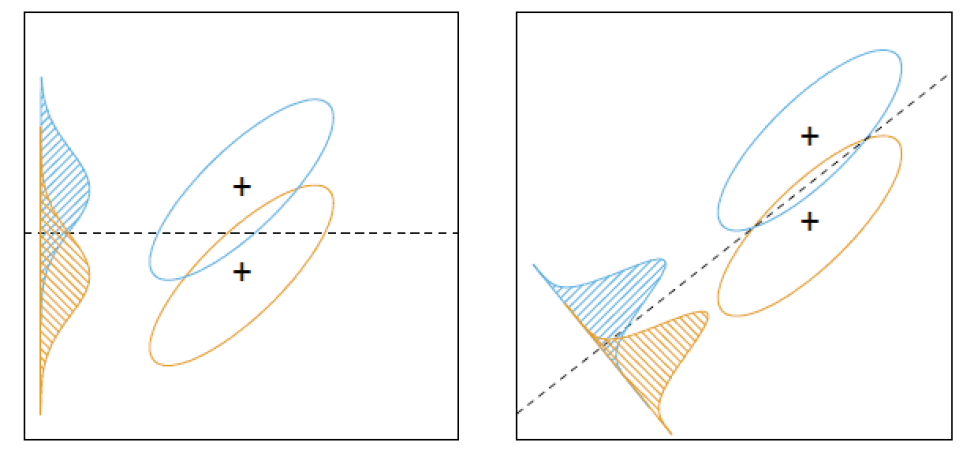
# 1. LDA在生物信息学中的应用基础
## 1.1 LDA的简介与重要性
在生物信息学领域,LDA(Latent Dirichlet Allocation)作为一种高级的统计模型,自其诞生以来在文本数据挖掘、基因表达分析等众多领域展现出了巨大的应用潜力。LDA模型能够揭示大规模数据集中的隐藏模式,有效地应用于发现和抽取生物数据中的隐含主题,这使得它成为理解复杂生物信息和推动相关研究的重要工具。
## 1.2 LDA在生物信息学中的应用场景
模型参数泛化能力:交叉验证与测试集分析实战指南

# 1. 交叉验证与测试集的基础概念
在机器学习和统计学中,交叉验证(Cross-Validation)和测试集(Test Set)是衡量模型性能和泛化能力的关键技术。本章将探讨这两个概念的基本定义及其在数据分析中的重要性。
## 1.1 交叉验证与测试集的定义
交叉验证是一种统计方法,通过将原始数据集划分成若干小的子集,然后将模型在这些子集上进行训练和验证,以
【Python预测模型构建全记录】:最佳实践与技巧详解
# 1. Python预测模型基础
Python作为一门多功能的编程语言,在数据科学和机器学习领域表现得尤为出色。预测模型是机器学习的核心应用之一,它通过分析历史数据来预测未来的趋势或事件。本章将简要介绍预测模型的概念,并强调Python在这一领域中的作用。
## 1.1 预测模型概念
预测模型是一种统计模型,它利用历史数据来预测未来事件的可能性。这些模型在金融、市场营销、医疗保健和其
掌握时间复杂度:从入门到精通的15个实用技巧

# 1. 时间复杂度基础概念
## 1.1 时间复杂度的重要性
在IT行业,算法的性能是衡量软件质量的关键因素之一。时间复杂度是评估算法执行时间如何随着输入数据的增长而
【目标变量优化】:机器学习中因变量调整的高级技巧
# 1. 目标变量优化概述
在数据科学和机器学习领域,目标变量优化是提升模型预测性能的核心步骤之一。目标变量,又称作因变量,是预测模型中希望预测或解释的变量。通过优化目标变量,可以显著提高模型的精确度和泛化能力,进而对业务决策产生重大影响。
## 目标变量的重要性
目标变量的选择与优化直接关系到模型性能的好坏。正确的目标变量可以帮助模
多变量时间序列预测区间:构建与评估

# 1. 时间序列预测理论基础
在现代数据分析中,时间序列预测占据着举足轻重的地位。时间序列是一系列按照时间顺序排列的数据点,通常表示某一特定变量随时间变化的情况。通过对历史数据的分析,我们可以预测未来变量的发展趋势,这对于经济学、金融、天气预报等诸多领域具有重要意义。
## 1.1 时间序列数据的特性
时间序列数据通常具有以下四种主要特性:趋势(Tre
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )