The Role of OpenCV and Python Versions in Autonomous Driving: Version Selection and Safety Considerations for Ensuring Road Safety
发布时间: 2024-09-14 16:59:04 阅读量: 25 订阅数: 33 
# The Role of OpenCV and Python Versions in Autonomous Driving: Version Selection and Safety Considerations for Road Safety
## ***puter Vision in Autonomous Driving
Computer vision plays a crucial role in autonomous driving, enabling vehicles to perceive their surroundings, including roads, other vehicles, pedestrians, and obstacles. By analyzing image and video data, computer vision algorithms can identify and classify objects, estimate depth and distance, and detect motion.
Autonomous systems use computer vision to achieve the following key functions:
- **Environmental perception:** Detect and classify surrounding objects, such as vehicles, pedestrians, traffic signs, and road markings.
- **Localization and mapping:** Utilize visual odometry and SLAM (Simultaneous Localization and Mapping) algorithms to determine the vehicle's position and construct environmental maps.
- **Path planning:** Plan safe and efficient paths based on the perceived environmental information.
## 2.1 Overview of OpenCV and Its Advantages in Autonomous Driving
### Overview of OpenCV
OpenCV (Open Source Computer Vision Library) is an open-source computer vision library that offers a wide range of algorithms and functions for image processing, video analysis, and machine learning. Maintained by Intel Corporation, it is widely used in various fields, including autonomous driving, robotics, and medical imaging.
### Advantages of OpenCV in Autonomous Driving
OpenCV has the following advantages in the field of autonomous driving:
- **Rich algorithm library:** OpenCV provides a series of algorithms tailored for computer vision tasks, including image segmentation, feature extraction, object detection, and tracking. These algorithms are optimized for real-time processing of large amounts of data, which is critical for autonomous driving systems.
- **Cross-platform support:** OpenCV supports multiple platforms, including Windows, Linux, and macOS, allowing it to be easily deployed in various autonomous driving systems.
- **Community support:** OpenCV has a vast user community providing extensive documentation, tutorials, and examples, which helps developers quickly learn and use the library.
- **Commercial support:** Intel Corporation offers commercial support, including technical support, training, and custom development, which is particularly important for autonomous driving systems requiring high performance and reliability.
### Applications of OpenCV in Autonomous Driving
The applications of OpenCV in autonomous driving include:
- **Environmental perception:** OpenCV is used to extract environmental information from sensor data, such as cameras, radars, and lidars, including roads, vehicles, pedestrians, and obstacles.
- **Object detection:** OpenCV is used to detect and recognize objects on the road, such as vehicles, pedestrians, and traffic signs.
- **Object tracking:** OpenCV is used to track moving objects, such as vehicles and pedestrians, to predict their movement trajectories.
- **Decision-making:** The environmental information and object detection results extracted by OpenCV are used for decision-making, such as path planning, obstacle avoidance, and lane keeping.
### Code Example
The following code example demonstrates how to use OpenCV for image segmentation:
```python
import cv2
# Load image
image = cv2.imread("image.jpg")
# Convert image to grayscale
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Apply Gaussian blur to reduce noise
blur = cv2.GaussianBlur(gray, (5, 5), 0)
# Apply thresholding to segment the image
thresh = cv2.threshold(blur, 127, 255, cv2.THRESH_BINARY)[1]
# Display the segmented image
cv2.imshow("Segmented Image", thresh)
cv2.waitKey(0)
```
### Code Logic Analysis
This code example demonstrates the image segmentation process:
1. Load the image and convert it to grayscale to reduce the effect of color information.
2. Apply a Gaussian filter to smooth the image and reduce noise, thereby improving segmentation accuracy.
3. Use thresholding to segment the image into foreground (white) and background (black) areas.
4. Display the segmented image.
## ***parison of OpenCV and Python Versions
### 3.1 Differences Between OpenCV Versions
Significant differences exist between OpenCV versions, mainly in the following aspects:
- **Functionality:** Different OpenCV versions offer different sets of features. Newer versions typically include more new features and improvements, while older versions are more stable but have fewer features.
- **Performance:** Newer OpenCV versions generally have better performance due to hardware acceleration and optimized algorithms.
- **API:** The OpenCV API may vary between versions. This can affect the compatibility of the code, requiring developers to make appropriate adjustments.
- **Support:** Newer OpenCV versions usually have better support, including documentation, tutorials, and community forums.
### 3.2 Differences Between Python Versions
There are also significant differences between Python versions, mainly in the following aspects:
- **Syntax:** Python 3.0 and higher versions have introduced many syntax changes, such as support for type annotations and asynchronous programming.
- **Libraries:** Python 3.0 and higher versions include many new libraries and modules, such as NumPy and Pandas for data science and machine learning.
- **Performance:** Python 3.0 and higher versions generally have better performance due to JIT compilation and optimize

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
KST Ethernet KRL 22中文版:掌握基础配置的7个关键步骤

# 摘要
本文主要介绍KST Ethernet KRL 22中文版的功能、配置方法、应用案例及维护升级策略。首先概述了KST Ethernet KRL 22的基本概念及其应用场景,然后详细讲解了基础配置,包括网络参数设置、通信协议选择与配置。在高级配置方面,涵盖了安全设置、日志记录和故障诊断的策略。文章接着介绍了KST Ethernet KRL 22在工业自动化、智能建筑和环境监测领域的实际应
Masm32性能优化大揭秘:高级技巧让你的代码飞速运行
# 摘要
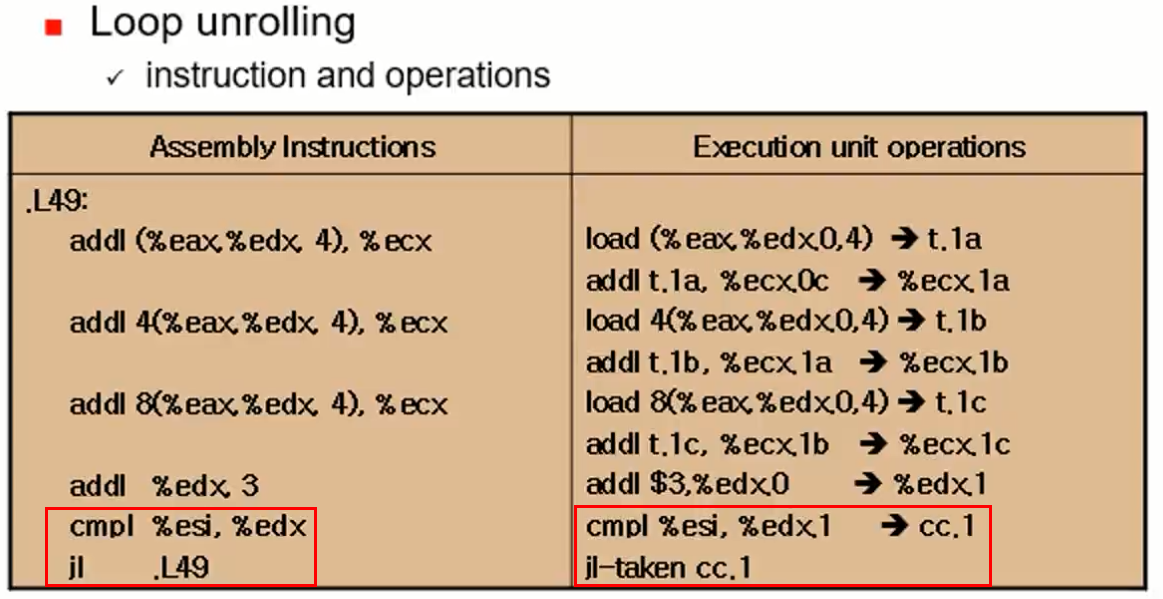
本文针对Masm32架构及其性能优化进行了系统性的探讨。首先介绍了Masm32的基础架构和性能优化基础,随后深入分析了汇编语言优化原理,包括指令集优化、算法、循环及分支预测等方面。接着,文章探讨了Masm32高级编程技巧,特别强调了内存访问、并发编程、函数调用的优化方法。实际性能调优案例部分,本文通过图形处理、文件系统和
【ABAP流水号生成秘籍】:掌握两种高效生成流水号的方法,提升系统效率
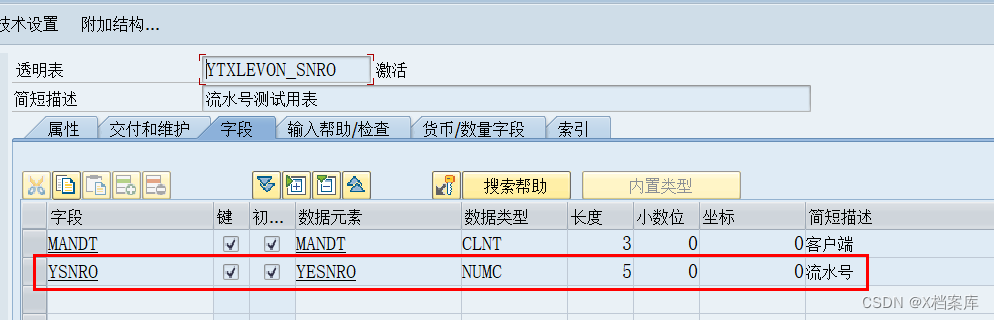
# 摘要
ABAP流水号生成是确保业务流程连续性和数据一致性的关键组成部分。本文首先强调了ABAP流水号生成的重要性,并详细探讨了经典流水号生成方法,包括传统序列号的维护、利用数据库表实现流水号自增和并发控制,以及流水号生成问题的分析与解决策略。随后,本文介绍了高效流水号生成方法的实践应用,涉及内存技术和事件驱动机制,以及多级流水号生成策略的设计与实现。第四章进一步探讨了ABAP流水号
泛微E9流程表单设计与数据集成:无缝连接前后端

# 摘要
本文系统性地介绍了泛微E9流程表单的设计概览、理论基础、实践技巧、数据集成以及进阶应用与优化。首先概述了流程表单的核心概念、作用及设计方法论,然后深入探讨了设计实践技巧,包括界面布局、元素配置、高级功能实现和数据处理。接着,文章详细讲解了流程表单与前后端的数据集成的理论框架和技术手段,并提供实践案例分析。最后,本文探索了提升表单性能与安全性的策略,以及面向未来的技术趋势,如人
TLS 1.2深度剖析:网络安全专家必备的协议原理与优势解读
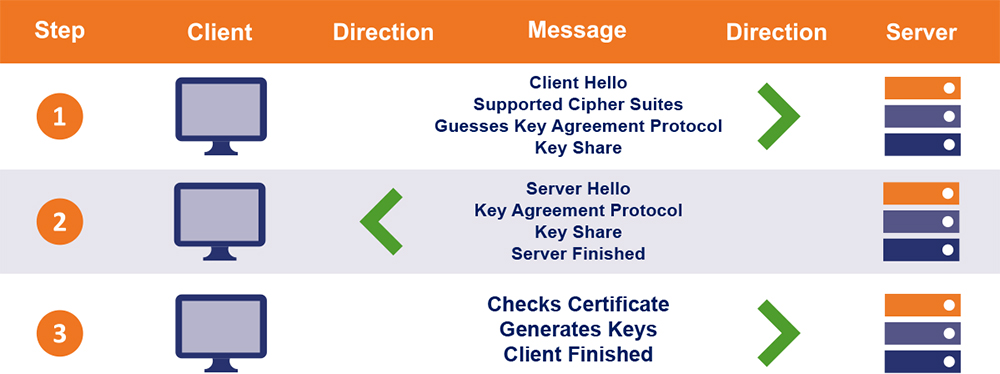
# 摘要
传输层安全性协议(TLS)1.2是互联网安全通信的关键技术,提供数据加密、身份验证和信息完整性保护。本文从TLS 1.2协议概述入手,详细介绍了其核心组件,包括密码套件的运作、证书和身份验证机制、以及TLS握手协议。文章进一步阐述了TLS 1.2的安全优势、性能优化策略以及在不同应用场景中的最佳实践。同时,本文还分析了TLS 1.2所面临的挑战和安全漏
FANUC-0i-MC参数定制化秘籍:打造你的机床性能优化策略
# 摘要
本文对FANUC-0i-MC机床控制器的参数定制化进行了全面探讨,涵盖了参数理论基础、实践操作、案例分析以及问题解决等方面。文章首先概述了FANUC-0i-MC控制器及其参数定制化的基础理论,然后详细介绍了参数定制化的原则、方法以及对机床性能的影响。接下来,本文通过具体的实践操作,阐述了如何在常规和高级应用中调整参数,并讨论了自动化和智能化背景下的参数定制化。案例分析部分则提供了实际操作中遇到问题的诊断与解决策略。最后,文章探讨了参数定制化的未来趋势,强调了安全考虑和个性化参数优化的重要性。通过对机床参数定制化的深入分析,本文旨在为机床操作者和维护人员提供指导和参考,以提升机床性能和
【约束冲突解决方案】:当约束相互碰撞,如何巧妙应对

# 摘要
约束冲突是涉及多个领域,包括商业、技术项目等,引起潜在问题的一个复杂现象。本文从理论上对约束冲突的定义和类型进行探讨,分类阐述了不同来源和影响范围的约束冲突。进一步分析了约束冲突的特性,包括其普遍性与特殊性以及动态变化的性质。通过研究冲突识别与分析的过程和方法,本文提出了冲突解决的基本原则和具体技巧,并通过实践案例分析展示了在商业和技术项目中
提高TIR透镜效率的方法:材料选择与形状优化的终极指南
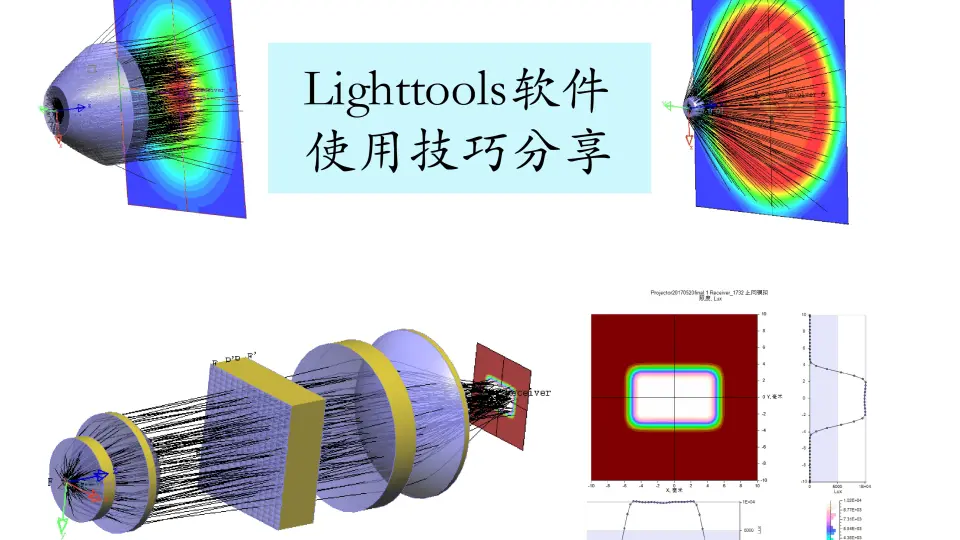
# 摘要
全内反射(TIR)透镜因其独特的光学性能,在光学系统中扮演着关键角色。本文探讨了TIR透镜效率的重要性,并深入分析了材料选择对透镜性能的影响,包括不同材料的基本特性及其折射率对透镜效率的作用。同时,本文也研究了透镜形状优化的理论与实践,讨论了透镜几何形状与光线路径的关系,以及优化设计的数学模型和算法。在实验方法方面,本文提供了实验设计、测量技术和数据分析的详细流程,
【组态王与PLC通信全攻略】:命令语言在数据交换中的关键作用

# 摘要
随着工业自动化程度的提升,组态王与PLC的通信变得尤为重要。本文首先对组态王与PLC通信进行了总体概述,接着深入探讨了命令语言的基础知识及其在组态王中的具体应用,包括命令语言的定义、语法结构以及数据类型的使用。进一步地,本文分析了命令语言在数据交换过程中的实现策略,包括PLC数据访问机制和组态王与PLC间的数据交换流程。文章还详细讨论了数据交换中遇到的常见问题及解决方法。在此基础上,本文探讨了命令语言的高级应用,并通过实际案例分析了其
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )