
ROS 官网学习资料整理 1-初级阶段
9
Version:1.0;Date:20140430;Author:LiGaofeng,NKU
contacting node http://machine_name:54614/ ...
Pid: 5092
(Note:在打开新的 terminal 时不要关掉最初的那个 terminal,因为关掉 terminal 的话原先运行的
Master节点也被关闭了。如果碰到这种情况,在运行rosnode list时会发现报错:cann’t communicatewith
Master。解决方法是:运行 roscore 命令开启 Master,然后再重新打开一个 terminal)
5.5 用 rosrun.
rosun 命令能够直接利用包名运行一个节点,而不需要知道包的路径:(问题:包与节点的关系是什
么?)
$ rosrun [package_name] [node_name]
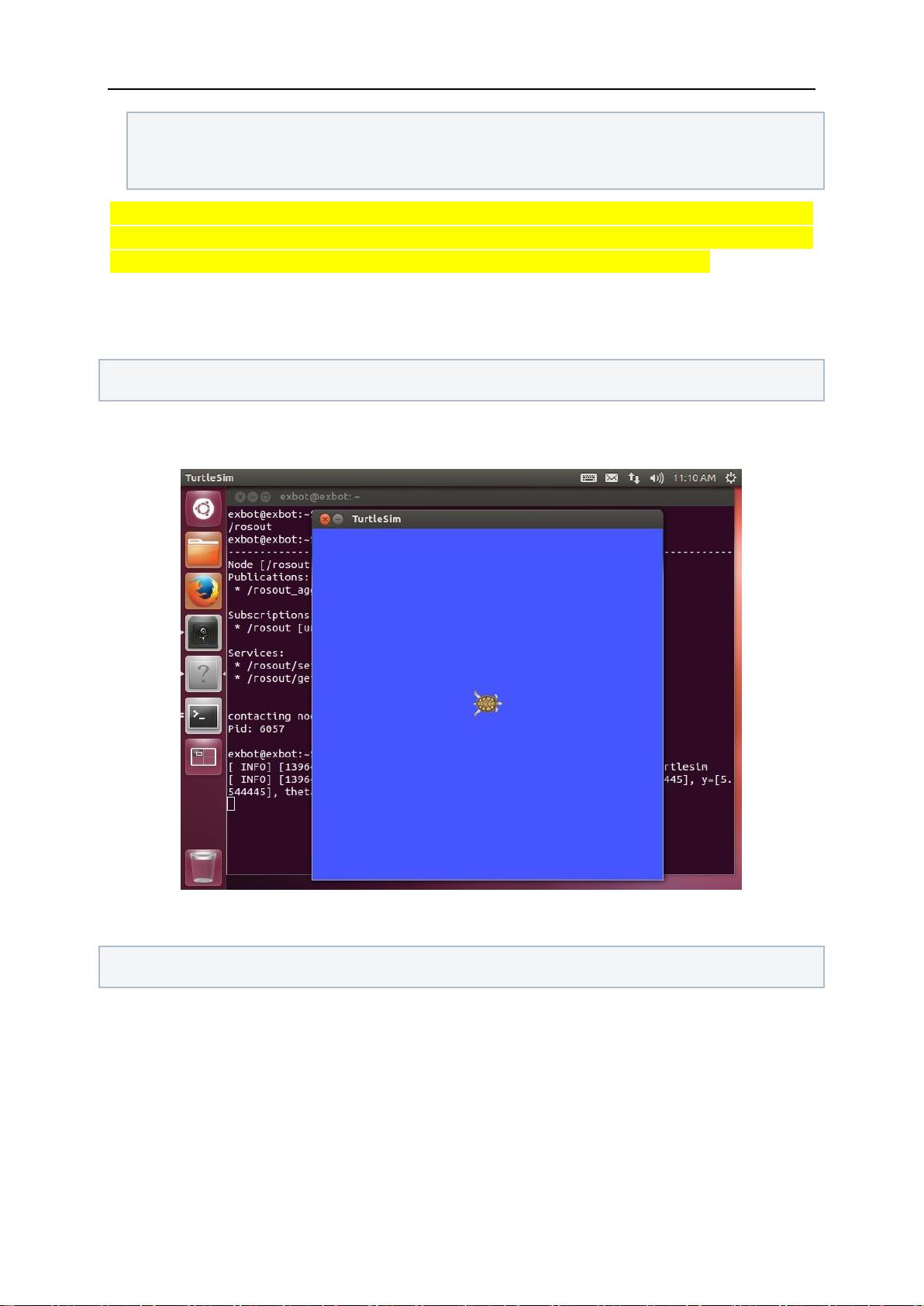
现在我们可以运行 turtlesim 包中的 turtlesim_node 试试小乌龟的仿真程序:
我的运行效果如下:
这时候再新开一个 terminal 运行 rosnode list 命令会发现多了一个 turtlesim 节点。
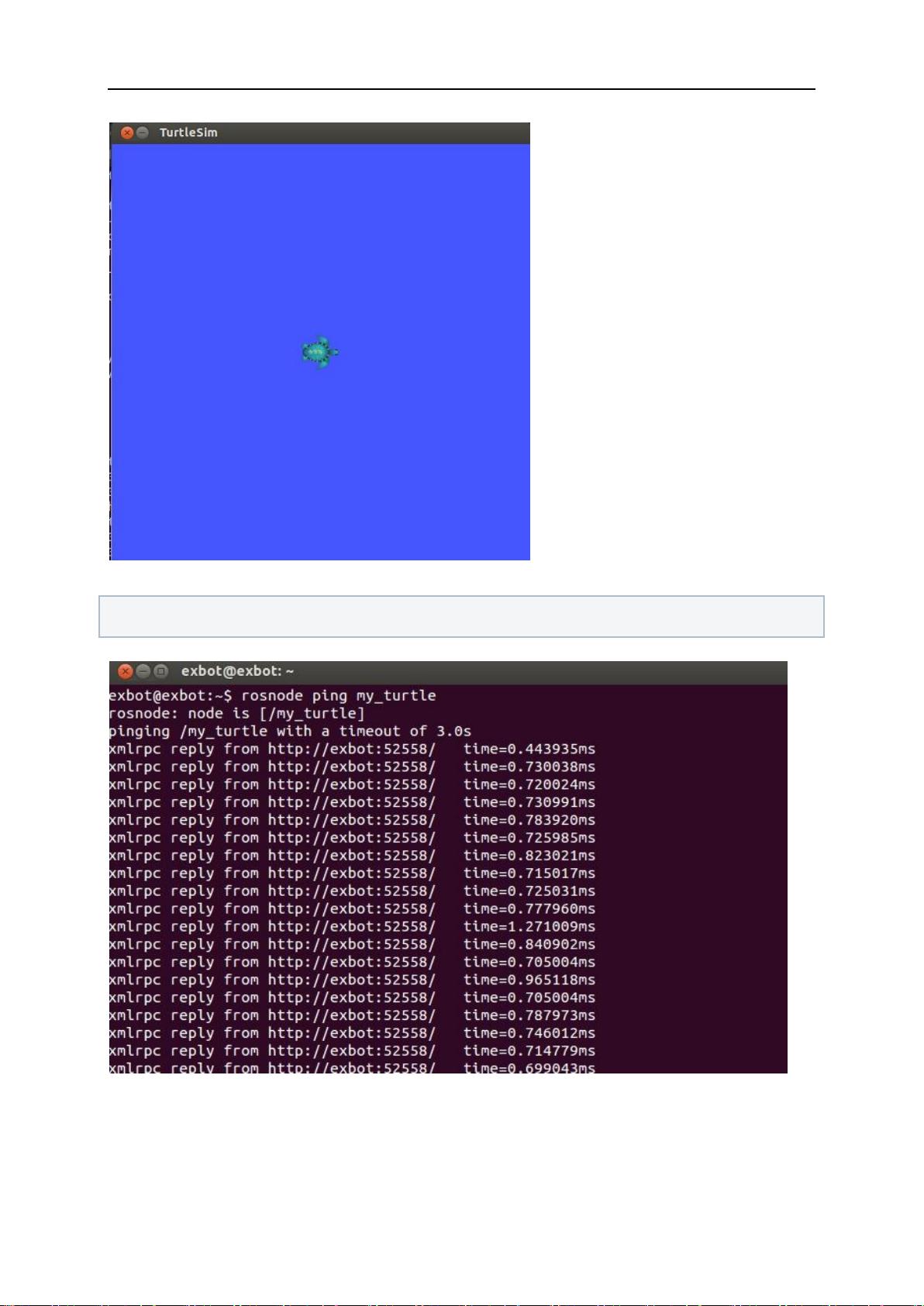
你还可以用下面命令更改节点的名字
$ rosrun turtlesim turtlesim_node __name:=my_turtle
新的效果图:
剩余47页未读,继续阅读


sungangqwe
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


