

Guidelines in Nonholonomic Motion Planning for Mobile Robots 5
minimum turning radius. Simple computation shows that the dynamic model
of the car is:
˙x
˙y
˙
θ
˙w
˙
ζ
=
w cos ζ cos θ
w cos ζ sin θ
w sin ζ
0
0
+
0
0
0
1
0
u
1
+
0
0
0
0
1
u
2
(3)
with |u
1
| ≤ u
1,max
and |u
2
| ≤ u
2,max
. This 5-dimensional system is not small-
time controllable from everywhere.
A first simplification consists in considering w as a control; it gives a 4-
dimensional system:
˙x
˙y
˙
θ
˙
ζ
=
cos ζ cos θ
cos ζ sin θ
sin ζ
0
w +
0
0
0
1
u
2
(4)
This new system is symmetric without drift; applying the LARC condition
shows that it is small-time controllable from everywhere. Notice that w should
be C
1
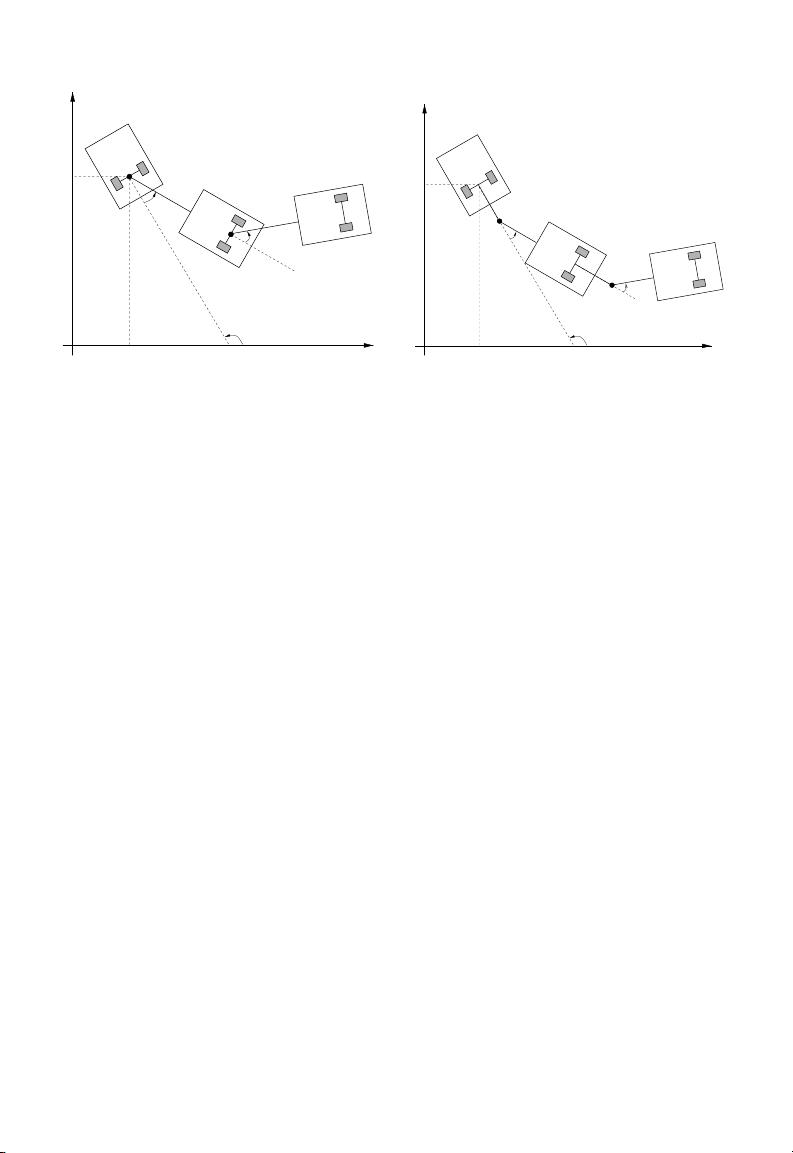
. Up to some coordinate changes, we may show that this system is equiv-
alent to the kinematic model of a two-driving wheel mobile robot pulling a
“trailer” which is the rear axle of the car (see below). The mechanical con-
straint |ζ| ≤ ζ
max
≤
π
2
appears as an “obstacle” in R
2
× (S
1
)
2
.
Let us assume that we do not care about the direction of the front wheels.
We may still simplify the model. By setting v = w cos ζ and ω = w sin ζ we get
a 3-dimensionated control system:
˙x
˙y
˙
θ
=
cos θ
sin θ
0
v +
0
0
1
ω (5)
By construction v and ω are C
1
and their values are bounded. This system
looks like the kinematic model of the two-driving wheel mobile robot. The
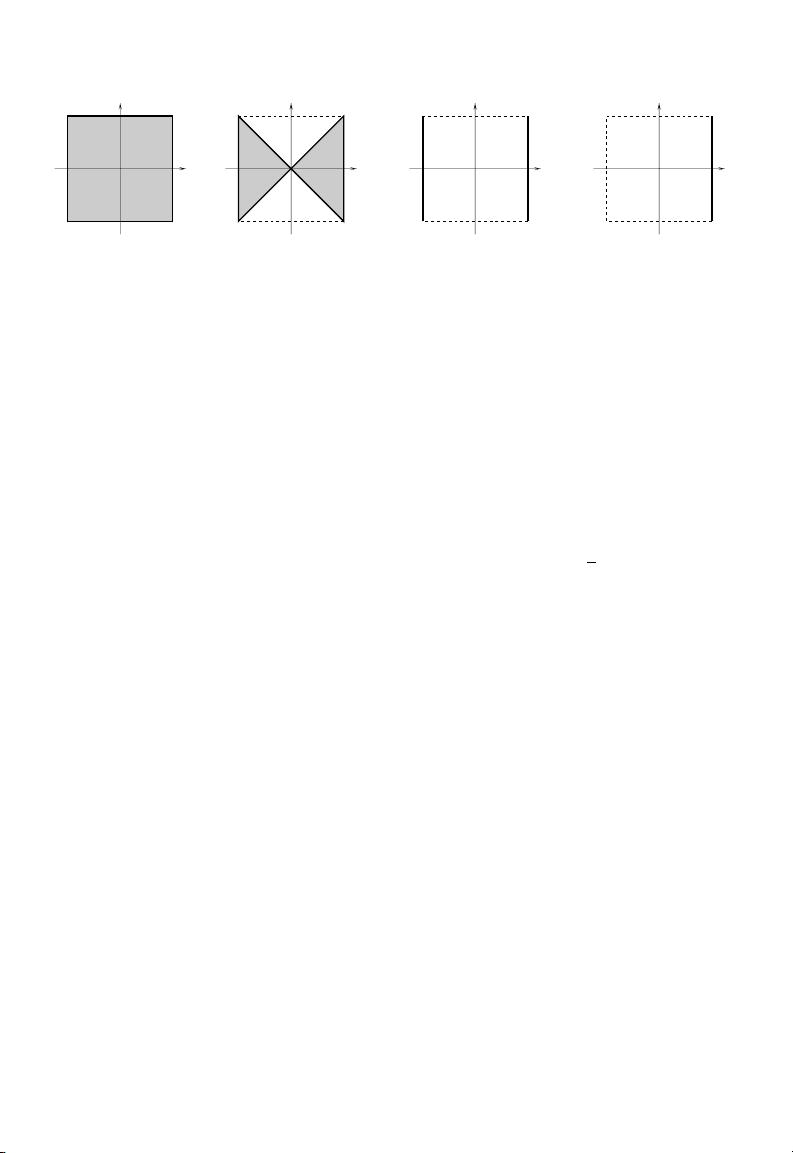
main difference lies on the admissible control domains. Here the constraints
on v and ω are no longer independent. Indeed, by setting w
max
=
√
2 and
ζ
max
=
π
4
we get: 0 ≤ |ω| ≤ |v| ≤ 1. This means that the admissible control
domain is no longer convex. It remains symmetric; we can still apply the LARC
condition to prove that this system is small-time controllable from everywhere.
The main difference with the two-driving wheel mobile robot is that the feasible
paths of the car should have a curvature lesser than 1.
A last simplification consists in putting |v| ≡ 1 and even v ≡ 1; by ref-
erence to the work in [65] and [22] on the shortest paths in the plane with

剩余354页未读,继续阅读

哈骑士
- 粉丝: 1
- 资源: 14
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 京瓷TASKalfa系列维修手册:安全与操作指南
- 小波变换在视频压缩中的应用
- Microsoft OfficeXP详解:WordXP、ExcelXP和PowerPointXP
- 雀巢在线媒介投放策划:门户网站与广告效果分析
- 用友NC-V56供应链功能升级详解(84页)
- 计算机病毒与防御策略探索
- 企业网NAT技术实践:2022年部署互联网出口策略
- 软件测试面试必备:概念、原则与常见问题解析
- 2022年Windows IIS服务器内外网配置详解与Serv-U FTP服务器安装
- 中国联通:企业级ICT转型与创新实践
- C#图形图像编程深入解析:GDI+与多媒体应用
- Xilinx AXI Interconnect v2.1用户指南
- DIY编程电缆全攻略:接口类型与自制指南
- 电脑维护与硬盘数据恢复指南
- 计算机网络技术专业剖析:人才培养与改革
- 量化多因子指数增强策略:微观视角的实证分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


