Exploring Techniques for Handling Nonlinear Constraints: MATLAB Linear Programming with Nonlinear Constraints Tips
发布时间: 2024-09-15 09:32:39 阅读量: 22 订阅数: 26 

Exploring Fine-grained Entity Type Constraints for Distantly Supervised Relation Extraction
# 1. Introduction to MATLAB Linear Programming**
MATLAB linear programming is a powerful tool for solving optimization problems with linear objective functions and constraints. Linear programming problems can be represented as:
```
min f(x)
s.t. Ax ≤ b
x ≥ 0
```
where:
* f(x) is the linear objective function
* A is the coefficient matrix
* b is the right-hand side constant vector
* x is the decision variable vector
MATLAB offers a variety of functions to solve linear programming problems, including:
* `linprog`: Solves linear programming problems using the simplex method
* `quadprog`: Solves linear programming problems using quadratic programming
* `fmincon`: Solves linear programming problems using nonlinear optimization algorithms
# 2. Theoretical Basis of Nonlinear Constraints
### 2.1 Types and Characteristics of Nonline***
***pared to linear constraints, nonlinear constraints have the following characteristics:
- **Complexity:** The expressions of nonlinear constraints are usually more complex than linear constraints, possibly involving nonlinear functions such as exponents, logarithms, and trigonometric functions.
- **Non-convexity:** The constraint region of nonlinear constraints may be non-convex, meaning that the boundary of the constraint region may have concave or convex parts.
- **Solving Difficulty:** Solving nonlinear constraints is usually more difficult than linear constraints because the properties of nonlinear functions may involve complex iterative algorithms.
### 2.2 Methods for Handling Nonlinear Constraints in Linear Programming
When solving linear programming problems, if nonlinear constraints exist, the following methods can generally be used to handle them:
- **Linearization:** Approximate nonlinear constraints as linear constraints. For example, for quadratic constraints, the first-order Taylor expansion can be used to approximate them as linear constraints.
- **Decomposition:** Decompose nonlinear constraints into multiple linear constraints. For example, for a constraint involving an exponential function, it can be decomposed into a linear constraint and a nonlinear constraint.
- **Penalty Function Method:** Convert nonlinear constraints into a penalty function and add a penalty term to the objective function. By adjusting the penalty function parameters, the solving process can gradually approach the solution of the nonlinear constraint.
- **Feasible Domain Method:** Convert nonlinear constraints into a feasible domain and solve the linear programming problem within the feasible domain. The feasible domain method can ensure that the obtained feasible solutions satisfy the nonlinear constraints.
# 3. Practical Tips for Nonlinear Constraints in MATLAB
### 3.1 Usage of the fmincon Function
#### 3.1.1 Function Syntax and Parameters
The `fmincon` function is used to solve nonlinear optimization problems with nonlinear constraints. Its syntax is as follows:
```
[x,fval,exitflag,output,lambda] = fmincon(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
```
The input parameters include:
* `fun`: The objective function, which accepts a vector input and returns a scalar output.
* `x0`: The initial guess point.
* `A` and `b`: The coefficient matrix and right-hand side vector for linear inequality constraints.
* `Aeq` and `beq`: The coefficient matrix and right-hand side vector for linear equality constraints.
* `lb` and `ub`: The lower and upper bounds for the variables.
* `nonlcon`: The nonlinear constraint function, which accepts a vector input and returns a structure containing the function values and Jacobian matrices for inequality and equality constraints.
The output parameters include:
* `x`: The optimized solution.
* `fval`: The value of the objective function at the solution.
* `exitflag`: The exit flag indicating the status of the optimization process.
* `output`: Information about the optimization proces

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
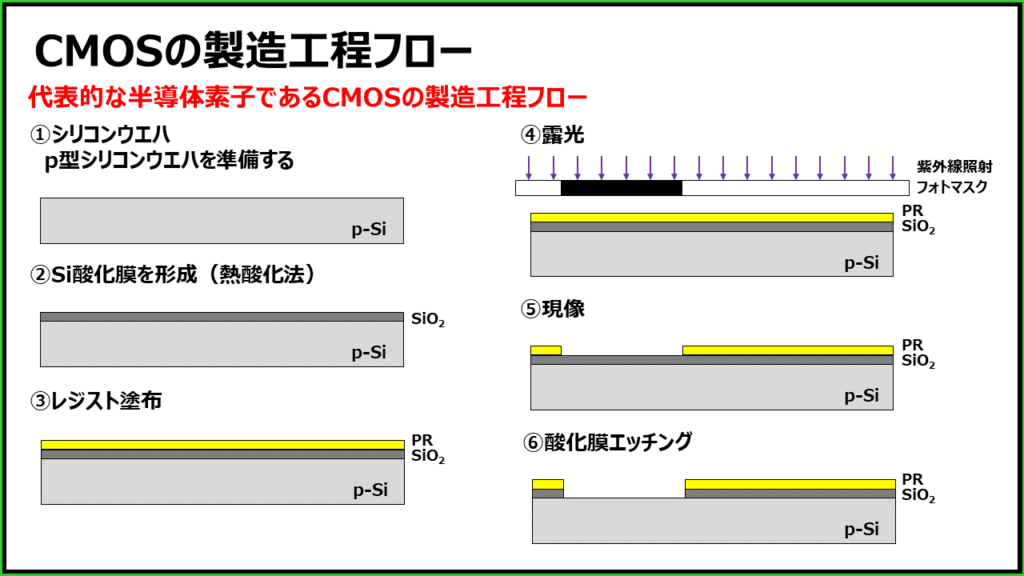
【CMOS集成电路设计实战解码】:从基础到高级的习题详解,理论与实践的完美融合
# 摘要
CMOS集成电路设计是现代电子系统中不可或缺的一环,本文全面概述了CMOS集成电路设计的关键理论和实践操作。首先,介绍了CMOS技术的基础理论,包括晶体管工作机制、逻辑门设计基础、制造流程和仿真分析。接着,深入探讨了CMOS集成电路的设计实践,涵盖了反相器与逻辑门设计、放大器与模拟电路设计,以及时序电路设计。此外,本文还
CCS高效项目管理:掌握生成和维护LIB文件的黄金步骤
# 摘要
本文深入探讨了CCS项目管理和LIB文件的综合应用,涵盖了项目设置、文件生成、维护优化以及实践应用的各个方面。文中首先介绍了CCS项目的创建与配置、编译器和链接器的设置,然后详细阐述了LIB文件的生成原理、版本控制和依赖管理。第三章重点讨论了LIB文件的代码维护、性能优化和自动化构建。第四章通过案例分析了LIB文件在多项目共享、嵌入式系统应用以及国际化与本地化处理中的实际应
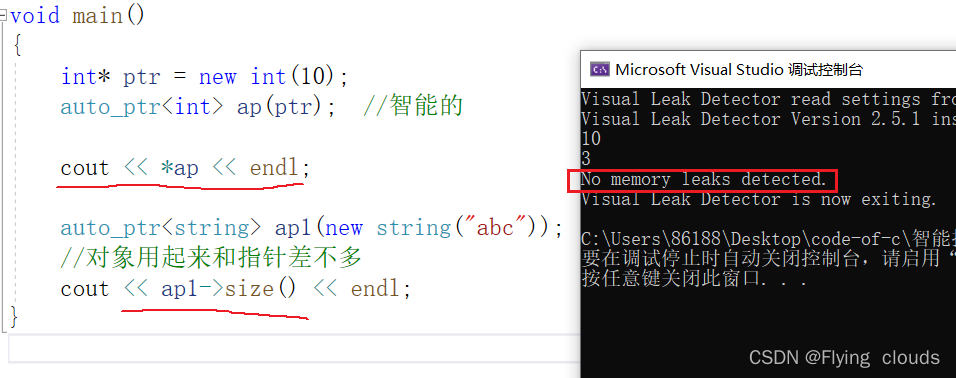
【深入剖析Visual C++ 2010 x86运行库】:架构组件精讲
# 摘要
Visual C++ 2010 x86运行库是支持开发的关键组件,涵盖运行库架构核心组件、高级特性与实现,以及优化与调试等多个方面。本文首先对运行库的基本结构、核心组件的功能划分及其交互机制进行概述。接着,深入探讨运行时类型信息(RTTI)与异常处理的工作原理和优化策略,以及标准C++内存管理接口和内存分配与释放策略。本文还阐述了运行库的并发与多线程支持、模板与泛型编程支持,
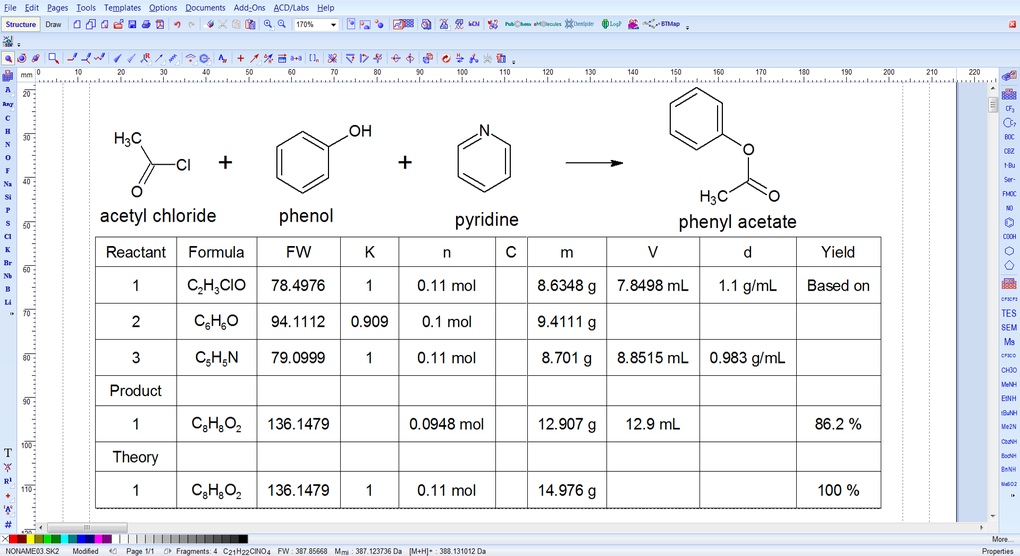
从零开始掌握ACD_ChemSketch:功能全面深入解读
# 摘要
ACD_ChemSketch是一款广泛应用于化学领域的绘图软件,本文概述了其基础和高级功能,并探讨了在科学研究中的应用。通过介绍界面布局、基础绘图工具、文件管理以及协作功能,本文为用户提供了掌握软件操作的基础知识。进阶部分着重讲述了结构优化、立体化学分析、高
蓝牙5.4新特性实战指南:工业4.0的无线革新

# 摘要
蓝牙技术是工业4.0不可或缺的组成部分,它通过蓝牙5.4标准实现了新的通信特性和安全机制。本文详细概述了蓝牙5.4的理论基础,包括其新增功能、技术规格,以及与前代技术的对比分析。此外,探讨了蓝牙5.4在工业环境中网络拓扑和设备角色的应用,并对安全机制进行了评估。本文还分析了蓝牙5.4技术的实际部署,包
【Linux二进制文件执行错误深度剖析】:一次性解决执行权限、依赖、环境配置问题(全面检查必备指南)

# 摘要
本文详细探讨了二进制文件执行过程中遇到的常见错误,并提出了一系列理论与实践上的解决策略。首先,针对执行权限问题,文章从权限基础理论出发,分析了权限设置不当所导致的错误,并探讨了修复权限的工具和方法。接着,文章讨论了依赖问题,包括依赖管理基础、缺失错误分析以及修复实践,并对比了动态与静态依赖。环境配置问题作为另一主要焦点,涵盖了
差分输入ADC滤波器设计要点:实现高效信号处理
# 摘要
本论文详细介绍了差分输入模数转换器(ADC)滤波器的设计与实践应用。首先概述了差分输入ADC滤波器的理论基础,包括差分信号处理原理、ADC的工作原理及其类型,以及滤波器设计的基本理论。随后,本研究深入探讨了滤波器设计的实践过程,从确定设计规格、选择元器件到电路图绘制、仿真、PCB布局,以及性能测试与验证的方法。最后,论文分析了提高差分输入ADC滤波器性能的优化策略,包括提升精
【HPE Smart Storage性能提升指南】:20个技巧,优化存储效率

# 摘要
本文深入探讨了HPE Smart Storage在性能管理方面的方法与策略。从基础性能优化技巧入手,涵盖了磁盘配置、系统参数调优以及常规维护和监控等方面,进而探讨高级性能提升策略,如缓存管理、数据管理优化和负载平衡。在自动化和虚拟化环境下,本文分析了如何利用精简配置、快照技术以及集成监控解决方案来进一步提升存储性能,并在最后章节中讨论了灾难恢复与备份策略的设计与实施。通过案
【毫米波雷达性能提升】:信号处理算法优化实战指南

# 摘要
毫米波雷达信号处理是一个涉及复杂数学理论和先进技术的领域,对于提高雷达系统的性能至关重要。本文首先概述了毫米波雷达信号处理的基本理论,包括傅里叶变换和信号特性分析,然后深入探讨了信号处理中的关键技术和算法优化策略。通过案例分析,评估了现有算法性能,并介绍了信号处理软件实践和代码优化技巧。文章还探讨了雷达系统的集成、测试及性能评估方法,并展望了未来毫米波雷达性能提升的技术趋
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )