【强化学习中的PPO算法:揭秘策略梯度算法的原理与应用】
发布时间: 2024-08-22 00:45:02 阅读量: 68 订阅数: 56 

PPO算法:强化学习中的高效策略优化利器.pdf
# 1. 强化学习中的策略梯度算法
策略梯度算法是强化学习中一种强大的算法,它直接优化策略函数以最大化奖励。策略梯度定理提供了策略梯度的计算方法,使得我们可以通过梯度上升的方式更新策略函数。
策略梯度算法的优点在于它可以处理连续动作空间和离散动作空间,并且不需要明确建模环境动态。它通过与环境交互并收集经验来学习最优策略,从而避免了传统强化学习方法中昂贵的动态规划过程。
# 2. PPO算法的原理与优势
### 2.1 策略梯度定理
策略梯度定理是强化学习中用于更新策略参数的数学基础。它表明,对于给定的策略π和价值函数V,策略π的梯度方向与目标函数J的梯度方向成正比,即:
```
∇_θ J(π) ∝ ∇_θ E[V(S_t) - V(S_0)]
```
其中:
* θ:策略π的参数
* J(π):目标函数,通常为累积奖励的期望值
* V(S_t):状态S_t的价值函数
* V(S_0):初始状态S_0的价值函数
### 2.2 PPO算法的更新规则
PPO(Proximal Policy Optimization)算法是一种策略梯度算法,它通过限制策略更新的步长来提高稳定性。PPO算法的更新规则如下:
```python
θ_new = θ_old + α * E[min(r_t(θ) * ∇_θ log π(a_t | s_t), clip(r_t(θ), 1 - ε, 1 + ε) * ∇_θ log π(a_t | s_t))]
```
其中:
* θ_new:更新后的策略参数
* θ_old:更新前的策略参数
* α:学习率
* r_t(θ):优势函数,衡量动作a_t在状态s_t下的好坏程度
* clip(r_t(θ), 1 - ε, 1 + ε):截断函数,限制优势函数的范围在[1 - ε, 1 + ε]内
* ε:截断阈值
### 2.3 PPO算法的优势和特点
PPO算法具有以下优势和特点:
* **稳定性高:**PPO算法通过限制策略更新的步长,提高了算法的稳定性,避免了策略更新过大导致性能下降的情况。
* **收敛速度快:**PPO算法使用了一种称为“信赖区域优化”的技术,可以加速算法的收敛速度。
* **适用于连续动作空间:**PPO算法不仅适用于离散动作空间,还适用于连续动作空间,这使其在控制任务中具有广泛的应用。
* **易于实现:**PPO算法的实现相对简单,易于与其他强化学习算法结合使用。
# 3. PPO算法的实践应用
### 3.1 PPO算法在连续控制任务中的应用
#### 3.1.1 环境搭建和模型训练
**环境搭建**
以经典的倒立摆控制任务为例,环境使用OpenAI Gym中的`gym.make("InvertedPendulum-v2")`创建。该环境模拟了一个倒立的单摆,目标是通过控制摆杆的力矩使其保持平衡。
**模型训练**
使用PyTorch实现PPO算法,模型采用一个三层神经网络,输入为环境状态(摆杆角度和角速度),输出为动作(力矩)。训练过程使用Adam优化器,学习率为0.001,训练批次大小为32。
```python
import gym
import torch
import torch.nn as nn
import torch.optim as optim
# 环境搭建
env = gym.make("InvertedPendulum-v2")
# 模型定义
class ActorCritic(nn.Module):
def __init__(self):
super(ActorCritic, self).__init__()
self.fc1 = nn.Linear(4, 128)
self.fc2 = nn.Linear(128, 1)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.tanh(self.fc2(x))
return x
# 策略梯度算法
def ppo_update(actor_critic, old_actor_critic, states, actions, rewards, values):
# 计算优势函数
advantages = rewards - values
# 计算策略梯度
log_probs = actor_critic(states).log_prob(actions)
old_log_probs = old_actor_critic(states).log_prob(actions)
ratio = torch.exp(log_probs - old_log_probs)
policy_loss = -torch.min(ratio * advantages, torch.clamp(ratio, 0.8, 1.2) * advantages)
# 计算价值函数损失
value_loss = F.mse_loss(actor_critic(states).value, values)
# 更新模型
optimizer.zero_grad()
loss = policy_loss + value_loss
loss.backward()
optimizer.step()
# 训练过程
for episode in range(1000):
# 采集数据
states, actions, rewards = [], [], []
for step in range(200):
state = env.reset()
done = False
while not done:
action = actor_critic(state).sample()
next_state, reward, done, _ = env.step(action)
states.append(state)
actions.append(action)
rewards.append(reward)
state = next_state
# 计算价值函数
values = actor_critic(torch.ten
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了强化学习中的 PPO 算法,这是一类强大的策略梯度算法。专栏文章涵盖了 PPO 算法的原理、实现和应用,并提供了详细的示例和代码。此外,还对比了 PPO 算法与其他策略梯度算法,并探讨了其在连续和离散动作空间中的应用。专栏还提供了 PPO 算法在多智能体系统中的应用、超参数调优、常见问题故障排除和工程实践方面的指导。通过深入了解 PPO 算法,读者可以掌握其在强化学习中的强大功能,并将其应用于广泛的应用场景。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
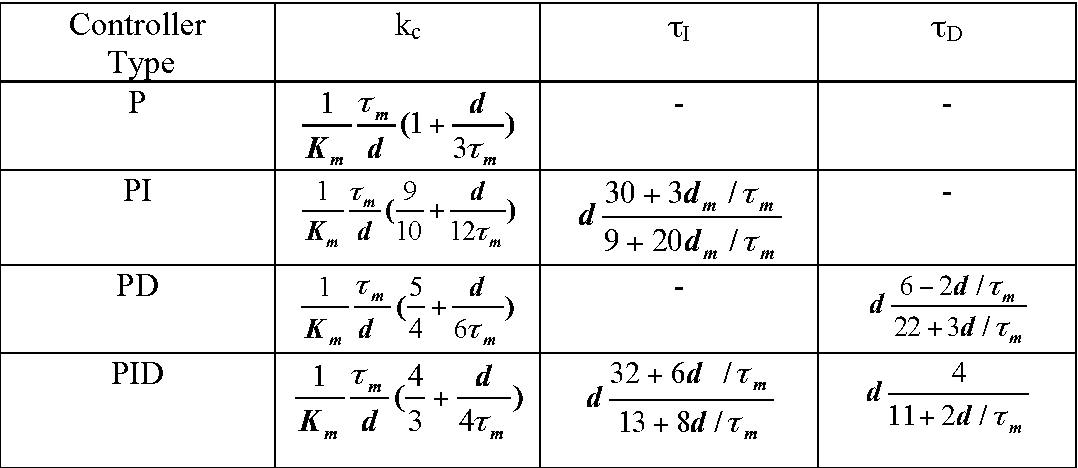
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
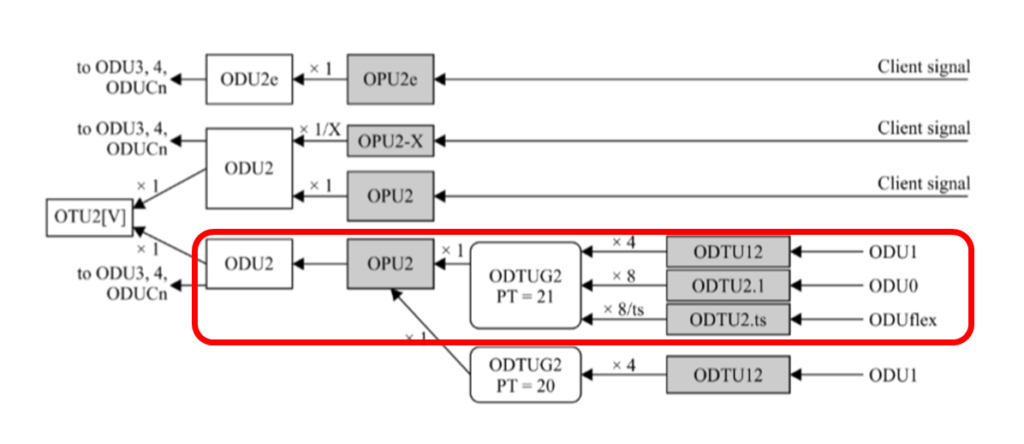
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
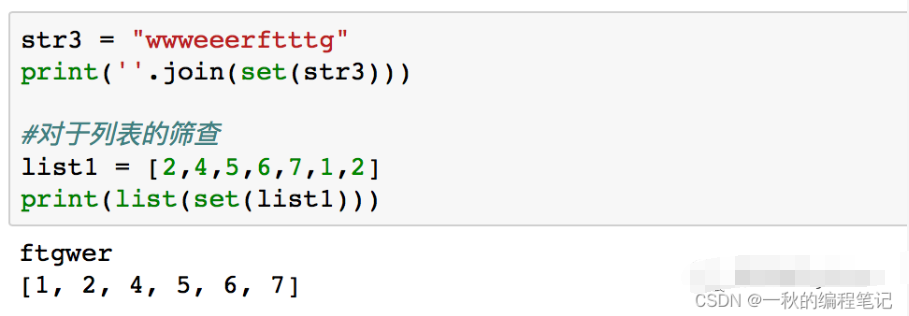
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )