【PPO算法揭秘】:强化学习中的策略梯度算法,原理、实现与应用详解
发布时间: 2024-08-22 00:40:21 阅读量: 14 订阅数: 18 
# 1. 强化学习中的策略梯度算法概述**
策略梯度算法是一种强化学习算法,它通过直接优化策略函数来学习最优行为。与值函数方法不同,策略梯度算法不显式估计值函数,而是直接更新策略,以最大化累积奖励。
策略梯度定理提供了策略更新的梯度计算方法,它表明策略梯度与策略函数对累积奖励的梯度成正比。基于此定理,策略梯度算法通过迭代更新策略,逐步逼近最优策略。
# 2. PPO算法原理
### 2.1 策略梯度定理
策略梯度定理是强化学习中用于更新策略参数的数学公式。它定义了策略参数梯度与目标函数期望梯度的关系,即:
```
∇θJ(θ) = E[∇θlogπ(at|st)Q(st,at)]
```
其中:
- θ:策略参数
- J(θ):目标函数(通常为累积奖励)
- π(at|st):在状态st下采取动作at的概率
- Q(st,at):在状态st下采取动作at的价值函数
### 2.2 PPO算法的推导
PPO(Proximal Policy Optimization)算法是基于策略梯度定理的一种强化学习算法。它通过约束策略参数的更新幅度,避免策略更新过大导致性能下降。
PPO算法的目标函数为:
```
L(θ) = E[min(r(θ)A(st,at), clip(r(θ),1-ε,1+ε)A(st,at))]
```
其中:
- r(θ):策略参数更新的比率,即新旧策略在相同状态下采取相同动作的概率比
- A(st,at):优势函数,衡量动作at在状态st下的价值
- ε:策略更新幅度的约束范围
### 2.3 PPO算法的优势和局限性
**优势:**
- **稳定性高:**PPO算法通过约束策略更新幅度,避免策略更新过大导致性能下降。
- **收敛速度快:**PPO算法使用多步更新策略,可以加速收敛速度。
- **适用于连续动作空间:**PPO算法可以通过使用高斯策略网络,适用于连续动作空间的强化学习问题。
**局限性:**
- **超参数调优困难:**PPO算法需要调优多个超参数,包括步长、更新幅度约束范围等,调优难度较大。
- **对环境噪声敏感:**PPO算法对环境噪声比较敏感,在噪声较大的环境中性能可能会下降。
- **计算开销大:**PPO算法需要存储多个策略梯度,计算开销较大。
# 3. PPO算法实现
### 3.1 环境搭建
**1. 依赖库安装**
```python
pip install gym pytorch numpy matplotlib
```
**2. 环境配置**
```python
import gym
env = gym.make('CartPole-v1')
```
### 3.2 算法代码实现
**1. 策略网络**
```python
import torch
import torch.nn as nn
class ActorCritic(nn.Module):
def __init__(self):
super(ActorCritic, self).__init__()
self.fc1 = nn.Linear(4, 128)
self.fc2 = nn.Linear(128, 2)
def forward(self, x):
x = F.relu(self.fc1(x))
x = F.softmax(self.fc2(x), dim=-1)
return x
```
**2. 策略梯度定理**
```python
import torch
import torch.nn.functional as F
def policy_gradient(actor_critic, states, actions, rewards):
log_probs = torch.log(actor_critic(states)[torch.arange(len(states)), actions])
return -torch.mean(log_probs * rewards)
```
**3. PPO算法**
```python
import torch
import torch.nn.functional as F
def ppo(actor_critic, env, epochs=1000):
optimizer = torch.optim.Adam(actor_critic.parameters(), lr=1e-3)
for epoch in range(epochs):
states, actions, rewards = [], [], []
for _ in range(100):
state = env.reset()
done = False
while not done:
action = actor_critic(torch.tensor(state)).argmax().item()
next_state, reward, done, _ = env.step(action)
states.append(state)
actions.append(action)
rewards.append(reward)
state = next_state
loss = policy_gradient(actor_critic, torch.tensor(states), torch.tensor(actions), torch.tensor(rewards))
optimizer.zero_grad()
loss.backward()
optimizer.step()
```
### 3.3 算法参数调优
**1. 学习率**
学习率是影响PPO算法收敛速度和稳定性的重要参数。较高的学习率可能导致算法不稳定,而较低的学习率可能导致收敛速度较慢。一般情况下,学习率设置为1e-3到1e-5之间。
**2. 批次大小**
批次大小是指在更新策略网络时使用的样本数量。较大的批次大小可以提高算法的稳定性,但可能会降低收敛速度。较小的批次大小可以提高收敛速度,但可能会导致算法不稳定。一般情况下,批次大小设置为32到128之间。
**3. 梯度裁剪**
梯度裁剪是防止策略网络梯度爆炸的一种技术。当策略网络的梯度过大时,可能会导致算法不稳定。梯度裁剪通过将梯度限制在一定范围内来防止这种情况。一般情况下,梯度裁剪设置为0.5到1.0之间。
# 4. PPO算法应用
### 4.1 游戏AI训练
PPO算法在游戏AI训练领域有着广泛的应用,其强大的学习能力和稳定性使其成为训练复杂游戏AI的理想选择。
#### 应用步骤
1. **环境搭建:**使用OpenAI Gym或其他游戏模拟器搭建游戏环境,定义游戏规则和奖励函数。
2. **算法配置:**根据游戏环境的复杂度和目标,配置PPO算法的参数,如学习率、步长和更新频率。
3. **训练过程:**将PPO算法与游戏环境交互,通过不断更新策略网络来提高AI的性能。
4. **评估表现:**使用预定义的指标(如胜率、得分)评估AI的训练效果,并根据需要调整算法参数。
#### 代码示例
```python
import gym
import ppo
# 环境搭建
env = gym.make("CartPole-v1")
# 算法配置
config = {
"learning_rate": 0.001,
"batch_size": 32,
"epochs": 10
}
# 算法训练
agent = ppo.PPOAgent(env, config)
agent.train()
# 评估表现
score = agent.evaluate(env)
print("平均得分:", score)
```
### 4.2 机器人控制
PPO算法在机器人控制领域也发挥着重要作用,其能够帮助机器人学习复杂动作和适应动态环境。
#### 应用场景
* **工业机器人:**优化机器人的运动轨迹和抓取动作,提高生产效率和安全性。
* **移动机器人:**训练机器人自主导航、避障和目标追踪,实现灵活的移动能力。
* **医疗机器人:**协助医生进行手术操作,提高手术精度和安全性。
#### 代码示例
```python
import gym
import ppo
# 环境搭建
env = gym.make("RoboschoolHalfCheetah-v1")
# 算法配置
config = {
"learning_rate": 0.001,
"batch_size": 64,
"epochs": 20
}
# 算法训练
agent = ppo.PPOAgent(env, config)
agent.train()
# 评估表现
score = agent.evaluate(env)
print("平均得分:", score)
```
### 4.3 金融交易策略优化
PPO算法在金融交易策略优化领域也得到了广泛应用,其能够帮助交易员学习最优交易策略并最大化投资收益。
#### 应用步骤
1. **数据收集:**收集历史金融数据,包括价格、成交量和技术指标。
2. **环境搭建:**使用强化学习框架构建交易环境,定义交易规则和奖励函数。
3. **算法配置:**根据交易环境的复杂度和目标,配置PPO算法的参数。
4. **策略训练:**将PPO算法与交易环境交互,通过不断更新策略网络来优化交易策略。
5. **回测评估:**使用未见过的历史数据对训练后的策略进行回测,评估其性能和风险。
#### 代码示例
```python
import gym
import ppo
# 环境搭建
env = gym.make("gym_finances:Forex-v0")
# 算法配置
config = {
"learning_rate": 0.001,
"batch_size": 128,
"epochs": 30
}
# 算法训练
agent = ppo.PPOAgent(env, config)
agent.train()
# 回测评估
returns = agent.backtest(env)
print("平均回报率:", returns)
```
# 5.1 多任务PPO算法
**简介**
多任务PPO算法是一种扩展的PPO算法,它能够在多个相关任务上同时进行训练。与单任务PPO算法相比,多任务PPO算法具有以下优势:
* **知识迁移:**多任务训练可以促进不同任务之间的知识迁移,提高算法在每个任务上的性能。
* **样本效率:**通过同时训练多个任务,多任务PPO算法可以更有效地利用训练数据,从而提高样本效率。
* **泛化能力:**多任务训练有助于提高算法的泛化能力,使其能够更好地处理新的或未见的任务。
**算法原理**
多任务PPO算法的基本原理与单任务PPO算法相似。它使用策略梯度定理来更新策略参数,并通过剪辑策略更新来确保策略的稳定性。然而,多任务PPO算法引入了以下修改:
* **共享网络:**多任务PPO算法使用共享网络架构来表示所有任务的策略和价值函数。这允许不同任务之间的知识迁移。
* **任务条件输入:**为了区分不同任务,多任务PPO算法将任务条件作为附加输入提供给网络。这使得网络能够学习任务特定的策略和价值函数。
* **任务奖励:**每个任务都有自己的奖励函数。多任务PPO算法通过将所有任务的奖励加权求和来计算总奖励。
**代码实现**
以下代码片段展示了多任务PPO算法的实现:
```python
import gym
import numpy as np
import tensorflow as tf
class MultiTaskPPO:
def __init__(self, env_list, task_conditions):
self.env_list = env_list
self.task_conditions = task_conditions
# Create shared network
self.actor = tf.keras.models.Sequential([
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dense(64, activation='relu'),
tf.keras.layers.Dense(env_list[0].action_space.n)
])
self.critic = tf.keras.models.Sequential([
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dense(64, activation='relu'),
tf.keras.layers.Dense(1)
])
# Create optimizer
self.optimizer = tf.keras.optimizers.Adam(learning_rate=1e-3)
def train(self, num_episodes):
for episode in range(num_episodes):
# Reset environments
obs_list = [env.reset() for env in self.env_list]
# Collect trajectories
trajectories = []
for task_idx, obs in enumerate(obs_list):
trajectory = []
done = False
while not done:
action = self.actor.predict(np.concatenate([obs, self.task_conditions[task_idx]]))
next_obs, reward, done, _ = self.env_list[task_idx].step(action)
trajectory.append((obs, action, reward, next_obs, done))
obs = next_obs
# Calculate advantages
advantages = []
for trajectory in trajectories:
obs, action, reward, next_obs, done = zip(*trajectory)
values = self.critic.predict(np.concatenate([obs, self.task_conditions]))
next_values = self.critic.predict(np.concatenate([next_obs, self.task_conditions]))
advantages.append(reward + 0.9 * next_values * (1 - done) - values)
# Update policy and value function
for task_idx, trajectory in enumerate(trajectories):
obs, action, reward, next_obs, done = zip(*trajectory)
with tf.GradientTape() as tape:
log_probs = tf.nn.log_softmax(self.actor.predict(np.concatenate([obs, self.task_conditions[task_idx]])))
policy_loss = -tf.reduce_mean(log_probs * advantages[task_idx])
value_loss = tf.reduce_mean((self.critic.predict(np.concatenate([obs, self.task_conditions[task_idx]])) - reward) ** 2)
grads = tape.gradient(policy_loss + value_loss, self.actor.trainable_weights + self.critic.trainable_weights)
self.optimizer.apply_gradients(zip(grads, self.actor.trainable_weights + self.critic.trainable_weights))
```
**参数说明**
* `env_list`: 一个包含所有任务环境的列表。
* `task_conditions`: 一个包含每个任务条件的列表。
* `num_episodes`: 训练的剧集数。
**逻辑分析**
该代码首先创建了共享网络架构,包括一个actor网络和一个critic网络。然后,它创建了一个优化器来更新网络参数。
在训练循环中,代码重置所有环境,收集所有任务的轨迹,并计算优势。然后,它使用优势更新策略和价值函数。
**扩展性说明**
多任务PPO算法可以通过以下方式进行扩展:
* **多模态输入:**可以将多模态输入(例如图像和文本)提供给网络,以提高算法在处理复杂任务时的性能。
* **元学习:**可以将元学习技术应用于多任务PPO算法,以提高算法在处理新任务时的适应性。
* **分布式训练:**可以通过使用分布式训练技术来并行化多任务PPO算法的训练过程,从而提高训练效率。
# 6.1 算法效率优化
PPO算法的效率优化主要集中在以下几个方面:
- **并行化计算:**PPO算法涉及大量的矩阵运算,可以通过并行化计算来提升效率。例如,可以使用多核CPU或GPU来并行执行矩阵乘法和反向传播操作。
- **经验回放:**PPO算法使用经验回放机制来存储历史数据,这可以减少训练过程中的数据访问开销。通过优化经验回放机制,例如使用优先级采样或重要性采样,可以进一步提升算法效率。
- **模型压缩:**对于大规模的强化学习任务,PPO算法的模型可能会变得非常庞大。通过模型压缩技术,例如剪枝或量化,可以减少模型的大小和计算开销。
## 6.2 算法稳定性提升
PPO算法的稳定性提升主要集中在以下几个方面:
- **剪辑参数:**PPO算法使用剪辑参数来限制策略更新的幅度,这有助于防止算法发散。通过优化剪辑参数的值,可以提高算法的稳定性。
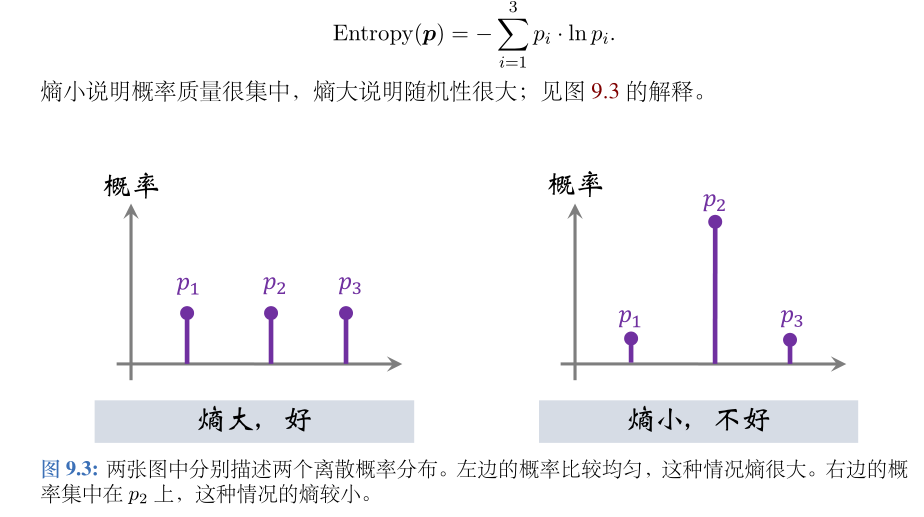
- **熵正则化:**PPO算法使用熵正则化项来鼓励策略探索,这有助于防止算法陷入局部最优。通过优化熵正则化项的权重,可以提升算法的稳定性。
- **信任区域方法:**信任区域方法是一种约束策略更新幅度的技术,可以提高算法的稳定性。通过使用信任区域方法,可以防止算法过度更新策略,从而避免发散。
## 6.3 新型PPO算法的探索
除了上述优化和改进之外,研究人员也在积极探索新型PPO算法,以进一步提升算法的性能。以下是一些新型PPO算法的研究方向:
- **分层PPO算法:**分层PPO算法将强化学习任务分解为多个子任务,并使用分层结构来解决这些子任务。这种方法可以提高算法的效率和稳定性。
- **元PPO算法:**元PPO算法是一种元强化学习算法,可以自动学习PPO算法的参数和超参数。这种方法可以减少算法调优的开销,并提高算法的泛化能力。
- **多模态PPO算法:**多模态PPO算法可以处理具有多个最优解的强化学习任务。这种方法可以提高算法的鲁棒性和适应性。
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了强化学习中的 PPO 算法,这是一类强大的策略梯度算法。专栏文章涵盖了 PPO 算法的原理、实现和应用,并提供了详细的示例和代码。此外,还对比了 PPO 算法与其他策略梯度算法,并探讨了其在连续和离散动作空间中的应用。专栏还提供了 PPO 算法在多智能体系统中的应用、超参数调优、常见问题故障排除和工程实践方面的指导。通过深入了解 PPO 算法,读者可以掌握其在强化学习中的强大功能,并将其应用于广泛的应用场景。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Installation and Uninstallation of MATLAB Toolboxes: How to Properly Manage Toolboxes for a Tidier MATLAB Environment
# Installing and Uninstalling MATLAB Toolboxes: Mastering the Art of Tool Management for a Neat MATLAB Environment
## 1. Overview of MATLAB Toolboxes
MATLAB toolboxes are supplementary software packages that extend MATLAB's functionality, offering specialized features for specific domains or appli
uint8 Overflow Crisis: Analysis, Solutions, and Ultimate Prevention Strategies
# 1. The Essence and Impact of uint8 Overflow Crisis
The uint8 data type is an 8-bit unsigned integer with a value range of 0 to 255. When the value of a uint8 variable exceeds its maximum value of 255, an overflow occurs. Overflow results in the variable's value wrapping around to 0, thereby compr
The Application of fmincon in Image Processing: Optimizing Image Quality and Processing Speed
# 1. Overview of the fmincon Algorithm
The fmincon algorithm is a function in MATLAB used to solve nonlinearly constrained optimization problems. It employs the Sequential Quadratic Programming (SQP) method, which transforms a nonlinear constrained optimization problem into a series of quadratic pr
MATLAB Function File Operations: Tips for Reading, Writing, and Manipulating Files with Functions
# 1. Overview of MATLAB Function File Operations
MATLAB function file operations refer to a set of functions in MATLAB designed for handling files. These functions enable users to create, read, write, modify, and delete files, as well as retrieve file attributes. Function file operations are crucia
【前端框架中的链表】:在React与Vue中实现响应式数据链

# 1. 链表与前端框架的关系
## 1.1 前端框架的挑战与链表的潜力
在前端框架中,数据状态的管理是一个持续面临的挑战。随着应用复杂性的增加,如何有效追踪和响应状态变化,成为优化
【前端缓存数据结构】:并发控制的高级策略(专家级教程)

# 1. 前端缓存技术概述
## 1.1 缓存技术的角色与作用
缓存技术在前端开发中起着至关重要的作用,它是提升Web应用响应
Getting Started with Mobile App Development Using Visual Studio
# 1. Getting Started with Mobile App Development in Visual Studio
## Chapter 1: Preparation
In this chapter, we will discuss the prerequisites for mobile app development, including downloading and installing Visual Studio, and becoming familiar with its interface.
### 2.1 Downloading and Installin
[Advanced MATLAB Signal Processing]: Multirate Signal Processing Techniques
# Advanced MATLAB Signal Processing: Multirate Signal Processing Techniques
Multirate signal processing is a core technology in the field of digital signal processing, allowing the conversion of digital signals between different rates without compromising signal quality or introducing unnecessary n
JS构建Bloom Filter:数据去重与概率性检查的实战指南
# 1. Bloom Filter简介与理论基础
## 1.1 什么是Bloom Filter
Bloom Filter是一种空间效率很高的概率型数据结构,用于快速判断一个元素是否在一个集合中。它提供了“不存在”的确定性判断和“存在”的概率判断,这使得Bloom Filter能够在占用较少内存空间的情况下对大量数据进行高效处理。
## 1.2 Bloom Filte
PyCharm Update and Upgrade Precautions
# 1. Overview of PyCharm Updates and Upgrades
PyCharm is a powerful Python integrated development environment (IDE) that continuously updates and upgrades to offer new features, improve performance, and fix bugs. Understanding the principles, types, and best practices of PyCharm updates and upgrade
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )