PPO算法在多智能体系统中的应用:协作与竞争
发布时间: 2024-08-22 01:13:33 阅读量: 13 订阅数: 19 
# 1. 多智能体系统概述**
多智能体系统是由多个智能体组成的系统,其中每个智能体都具有感知、决策和行动的能力。多智能体系统在各个领域都有着广泛的应用,例如机器人协作、无人机编队和智能交通。
多智能体系统面临的主要挑战之一是协调不同智能体之间的行为,以实现共同的目标。传统的方法通常采用集中式控制,其中一个中心实体负责协调所有智能体的行为。然而,这种方法在复杂和动态的环境中往往不可行,因为中心实体可能无法获得所有必要的信息来做出最佳决策。
为了解决这个问题,研究人员提出了分布式多智能体系统,其中每个智能体都独立决策并与其他智能体进行交互。分布式多智能体系统具有鲁棒性强、适应性好等优点,使其成为解决复杂问题的一个有吸引力的选择。
# 2. PPO算法理论
### 2.1 近端策略优化(PPO)算法原理
#### 2.1.1 策略梯度定理
策略梯度定理是PPO算法的基础,它提供了计算策略梯度的方法,即策略参数变化对目标函数影响的梯度。对于离散动作空间,策略梯度定理公式如下:
```
∇_θ J(θ) = E[∇_θ log π(a_t | s_t) A_t]
```
其中:
* θ:策略参数
* J(θ):目标函数
* π(a_t | s_t):在状态s_t下采取动作a_t的概率
* A_t:优势函数,衡量动作a_t相对于其他动作的优势
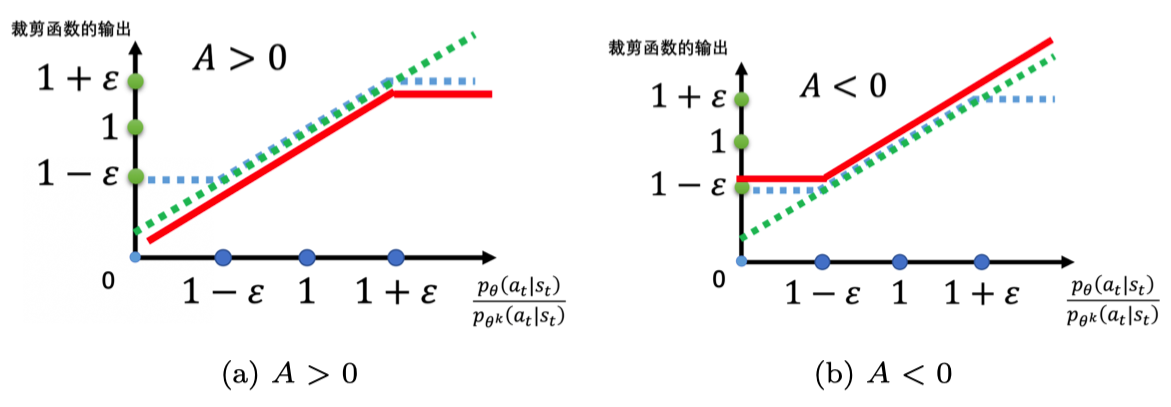
#### 2.1.2 PPO算法的优化目标
PPO算法的优化目标是最大化以下目标函数:
```
L(θ) = E[min(r_t(θ), clip(r_t(θ), 1 - ε, 1 + ε)) A_t]
```
其中:
* r_t(θ):策略梯度定理中计算的策略梯度
* clip(r_t(θ), 1 - ε, 1 + ε):截断函数,限制策略梯度的范围
* ε:截断阈值
### 2.2 PPO算法的实现细节
#### 2.2.1 演员-评论家架构
PPO算法采用演员-评论家架构,其中演员网络输出动作概率分布,评论家网络输出状态价值函数。演员网络根据评论家网络提供的价值函数更新策略,而评论家网络则根据策略更新价值函数。
#### 2.2.2 经验回放池
PPO算法使用经验回放池来存储过往的经验,这些经验包括状态、动作、奖励和下一个状态。在策略更新时,算法会从经验回放池中采样一批经验进行训练。
#### 2.2.3 策略更新机制
PPO算法使用一种称为信任区域策略优化(TRPO)的策略更新机制。TRPO通过限制策略更新的步长来确保策略的稳定性。具体来说,TRPO算法会计算一个约束,该约束限制策略更新的步长,使得更新后的策略不会偏离原始策略太多。
# 3. PPO算法在多智能体系统中的应用
### 3.1 多智能体协作优化
#### 3.1.1 分布式PPO算法
在多智能体协作优化中,PPO算法可以被扩展为分布式版本,以处理大规模多智能体系统。分布式PPO算法将训练过程分布在多个智能体上,每个智能体负责收集自己的经验并更新自己的策略。
**代码块:**
```python
import ray
import torch
@ray.remote
def train_agent(env, agent):
# 收集经验
experiences = []
fo
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了强化学习中的 PPO 算法,这是一类强大的策略梯度算法。专栏文章涵盖了 PPO 算法的原理、实现和应用,并提供了详细的示例和代码。此外,还对比了 PPO 算法与其他策略梯度算法,并探讨了其在连续和离散动作空间中的应用。专栏还提供了 PPO 算法在多智能体系统中的应用、超参数调优、常见问题故障排除和工程实践方面的指导。通过深入了解 PPO 算法,读者可以掌握其在强化学习中的强大功能,并将其应用于广泛的应用场景。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Image Processing and Computer Vision Techniques in Jupyter Notebook
# Image Processing and Computer Vision Techniques in Jupyter Notebook
## Chapter 1: Introduction to Jupyter Notebook
### 2.1 What is Jupyter Notebook
Jupyter Notebook is an interactive computing environment that supports code execution, text writing, and image display. Its main features include:
-
Parallelization Techniques for Matlab Autocorrelation Function: Enhancing Efficiency in Big Data Analysis
# 1. Introduction to Matlab Autocorrelation Function
The autocorrelation function is a vital analytical tool in time-domain signal processing, capable of measuring the similarity of a signal with itself at varying time lags. In Matlab, the autocorrelation function can be calculated using the `xcorr
Technical Guide to Building Enterprise-level Document Management System using kkfileview
# 1.1 kkfileview Technical Overview
kkfileview is a technology designed for file previewing and management, offering rapid and convenient document browsing capabilities. Its standout feature is the support for online previews of various file formats, such as Word, Excel, PDF, and more—allowing user
Expert Tips and Secrets for Reading Excel Data in MATLAB: Boost Your Data Handling Skills
# MATLAB Reading Excel Data: Expert Tips and Tricks to Elevate Your Data Handling Skills
## 1. The Theoretical Foundations of MATLAB Reading Excel Data
MATLAB offers a variety of functions and methods to read Excel data, including readtable, importdata, and xlsread. These functions allow users to
Analyzing Trends in Date Data from Excel Using MATLAB
# Introduction
## 1.1 Foreword
In the current era of information explosion, vast amounts of data are continuously generated and recorded. Date data, as a significant part of this, captures the changes in temporal information. By analyzing date data and performing trend analysis, we can better under
Styling Scrollbars in Qt Style Sheets: Detailed Examples on Beautifying Scrollbar Appearance with QSS
# Chapter 1: Fundamentals of Scrollbar Beautification with Qt Style Sheets
## 1.1 The Importance of Scrollbars in Qt Interface Design
As a frequently used interactive element in Qt interface design, scrollbars play a crucial role in displaying a vast amount of information within limited space. In
[Frontier Developments]: GAN's Latest Breakthroughs in Deepfake Domain: Understanding Future AI Trends
# 1. Introduction to Deepfakes and GANs
## 1.1 Definition and History of Deepfakes
Deepfakes, a portmanteau of "deep learning" and "fake", are technologically-altered images, audio, and videos that are lifelike thanks to the power of deep learning, particularly Generative Adversarial Networks (GANs
PyCharm Python Version Management and Version Control: Integrated Strategies for Version Management and Control
# Overview of Version Management and Version Control
Version management and version control are crucial practices in software development, allowing developers to track code changes, collaborate, and maintain the integrity of the codebase. Version management systems (like Git and Mercurial) provide
Installing and Optimizing Performance of NumPy: Optimizing Post-installation Performance of NumPy
# 1. Introduction to NumPy
NumPy, short for Numerical Python, is a Python library used for scientific computing. It offers a powerful N-dimensional array object, along with efficient functions for array operations. NumPy is widely used in data science, machine learning, image processing, and scient
Statistical Tests for Model Evaluation: Using Hypothesis Testing to Compare Models
# Basic Concepts of Model Evaluation and Hypothesis Testing
## 1.1 The Importance of Model Evaluation
In the fields of data science and machine learning, model evaluation is a critical step to ensure the predictive performance of a model. Model evaluation involves not only the production of accura
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )