Keil5 Multitasking Scheduling: A Practical Guide to FreeRTOS
发布时间: 2024-09-15 13:40:11 阅读量: 38 订阅数: 50 

KEIL5编译器安装包:Compiler-506-Windows-x86-b960
# 1. Overview of Keil5 Multitasking Scheduling
Multitasking scheduling is an operating system technique that allows multiple tasks to run simultaneously within the same timeframe. In Keil5, FreeRTOS is a popular real-time operating system (RTOS) used for multitasking scheduling. FreeRTOS offers a rich set of APIs that enable developers to create and manage tasks, queues, semaphores, and timers. With FreeRTOS, developers can create complex multitasking applications that can efficiently utilize the resources of microcontrollers.
# 2. FreeRTOS Basic Concepts and Configuration
### 2.1 Introduction to FreeRTOS and Its Architecture
#### 2.1.1 Tasks, Queues, and Semaphores in FreeRTOS
FreeRTOS is a lightweight, preemptive, real-time operating system mainly used in embedded systems. It provides a series of core functionalities, including task management, synchronization and communication mechanisms, as well as timer management.
***Task:** A task is the smallest unit of execution in FreeRTOS, with each task having its own stack space and execution code. Tasks can run concurrently and can have different priorities.
***Queue:** A queue is a FIFO (first-in, first-out) data structure used for passing data between tasks. Tasks can put data into a queue or retrieve data from it.
***Semaphore:** A semaphore is a synchronization mechanism used to coordinate task access. Tasks can acquire a semaphore to indicate that a resource is available, or release a semaphore to allow other tasks to use the resource.
#### 2.1.2 FreeRTOS Priorities and Scheduling Algorithm
Tasks in FreeRTOS have priorities, with higher-priority tasks having more execution rights than lower-priority ones. FreeRTOS uses a preemptive scheduling algorithm, meaning higher-priority tasks can preempt lower-priority ones.
The FreeRTOS scheduling algorithm is based on the following principles:
***Ready Queue:** All ready tasks are stored in the ready queue, sorted by priority from high to low.
***Time Slice:** Each task has a time slice, and it will continue to execute until its time slice expires.
***Preemption:** If a higher-priority task becomes ready, it will preempt the currently executing task.
### 2.2 Configuring FreeRTOS in Keil5
#### 2.2.1 Creating a FreeRTOS Project
Creating a FreeRTOS project in Keil5 involves the following steps:
1. Open Keil5, select "File" -> "New" -> "uVision Project".
2. Enter the project name in "Project Name" and select the target device in "Target".
3. In the "Device" tab, select "CMSIS Device Database" and search for the target device.
4. In the "CMSIS Pack Manager," search for "FreeRTOS" and install the FreeRTOS library.
5. In the "Project" tab, check "Enable CMSIS-Pack" and select the FreeRTOS library.
6. Click "OK" to create the project.
#### 2.2.2 Configuring the FreeRTOS Kernel and Tasks
Configuring the FreeRTOS kernel and tasks in Keil5 requires the following steps:
1. Double-click the "FreeRTOSConfig.h" file in the "Project" tab.
2. Configure FreeRTOS kernel parameters, such as the number of tasks, stack size, and clock speed.
3. Create tasks, specifying priority, stack size, and task functions for each task.
```c
/* FreeRTOSConfig.h */
#define configTOTAL_TASKS 3
#define configMINIMAL_STACK_SIZE 128
#define configCPU_CLOCK_HZ 8000000
/* Task 1 */
#define TASK1_PRIORITY 1
#define TASK1_STACK_SIZE 256
void Task1(void *pvParameters);
/* Task 2 */
#define TASK2_PRIORITY 2
#define TASK2_STACK_SIZE 256
void Task2(void *pvParameters);
/* Task 3 */
#define TASK3_PRIORITY 3
#define TASK3_STACK_SIZE 256
void Task3(void *pvParameters);
```
**Code Logic Analysis:**
* `configTOTAL_TASKS` defines the number of tasks in the system.
* `configMINIMAL_STACK_SIZE` defines the minimum stack size for each task.
* `configCPU_CLOCK_HZ` defines the CPU clock speed.
* `TASK1_PRIORITY`, `TASK2_PRIORITY`, and `TASK3_PRIORITY` define the priority for each task.
* `TASK1_STACK_SIZE`, `TASK2_STACK_SIZE`, and `TASK3_STACK_SIZE` define the stack size for each task.
* `Task1`, `Task2`, and `Task3` are task functions that will be scheduled for execution by FreeRTOS.
# 3. FreeRTOS Task Management
### 3.1 Task Creation and Control
#### 3.1.1 Task Creation Function and Parameters
In FreeRTOS, task creation uses the `xTaskCreate` function. The prototype of this function is as follows:
```cpp
BaseType_t xTaskCreate(
TaskFunction_t pvTaskCode, // Task function
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PADS进阶秘籍:logic篇深度解析,揭秘高速电路设计的7个关键要点
# 摘要
本文详细介绍了PADS Logic的设计和应用,从基础概述、高速电路设计原理到高级功能,再到实际应用与未来趋势,全面覆盖了电路设计的各个方面。在高速电路设计原理部分,本文分析了信号完整性、时序管理和布局布线策略的关键因素,这些都是确保电路性能和可靠性的重要因素。在高级功能章节中,探讨了通过参数设置与优化、
超微X9DRi_3-LN4F+电源管理:提升能效与系统稳定性的5项措施

# 摘要
本论文旨在全面探讨超微X9DRi_3-LN4F+服务器的电源管理,包括其理论基础、硬件和软件优化措施,以及未来的发展方向。通过对电源管理的定义、目标、以及系统稳定性要求的深入分析,本文揭示了电源效率对于系统整体性能的重要性。硬件级优化措施涉及硬件配置、系统监控及维护策略,旨在提升电源单元的选择、配置及服务器组件的电源效率。软件级优化措施则强调了软件工具、操作系统设置和应用程序优化在能效管理中的作用。文章最后讨论了新技术趋势如何影响电源管理,并分析了面临的挑战和可
ArcGIS空间插值技术揭秘:经验半变异函数全攻略
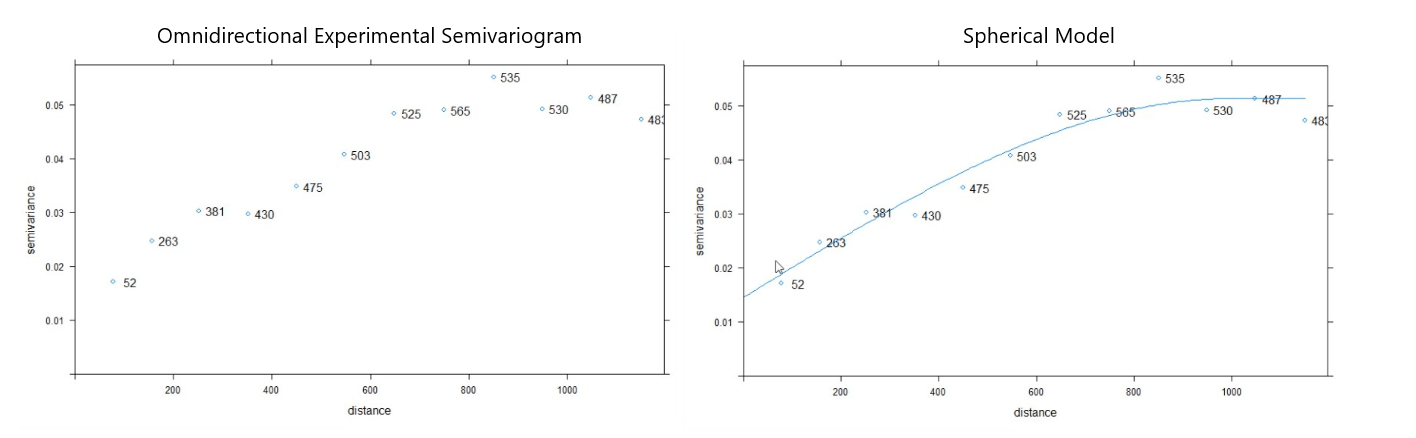
# 摘要
空间插值技术是地理信息系统(GIS)中的核心组成部分,它允许从有限的空间数据样本中估计未知位置的属性值。本文首先概述了空间插值技术的概念和基础理论,包括变异函数和半变异函数的理论基础及其在空间依赖性分析中的作用。随后,详细探讨了经验半变异函数的计算、分析和优化过程,并针对ArcGIS环境下的具体操作提供了实践指导。本文还探讨了多变量空间插值、动态空间插值以及3D空间插值和地统计
【Python与Java性能对比分析】:选择Python还是Java的7大理由

# 摘要
在现代软件开发领域中,Python和Java作为两种主流编程语言,它们在性能方面的对比及其优化策略一直是开发者关注的焦点。本文通过系统地比较了Python和Java在基础性能、实际应用表现以及生态系统支持等多方面的差异和特点。文章深入分析了Python与Java在设计哲学、内存管理、线程模型等方面的本质差异,并针对Web应用、数据科学、大数据处理以及网络服务等关键应用场景,进
技术翻译的胜利之路:OptiSystem组件库汉化与实践的全解析
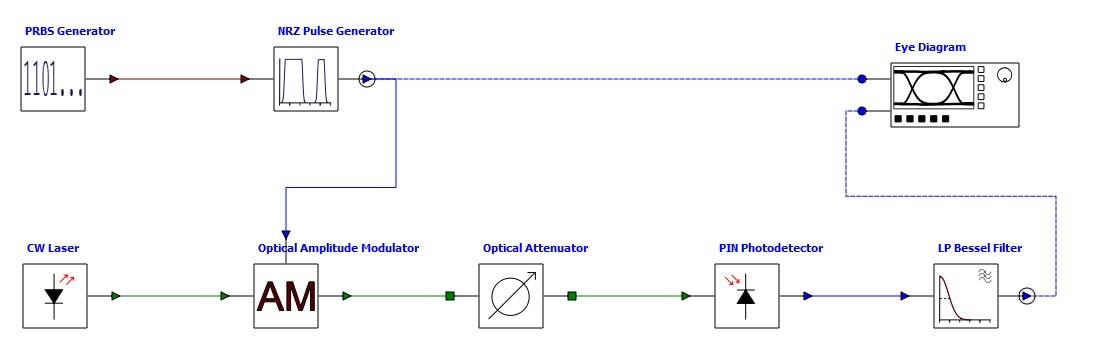
# 摘要
本文探讨了OptiSystem组件库的汉化过程及其重要性,分析了汉化技术的理论基础和实施过程。文章首先介绍了OptiSystem组件库的架构组成和组件间交互,接着深入讨论了汉化技术的选择、实施步骤、优化策略以及实践操作中的质量控制。此外,本文还探讨了技术翻译在汉化项目中的作用、语言文化差异的处理、实践中的技术难点与创新点。最后,文章分析
企业网络QoS高级配置:流量整形的精髓与实践

# 摘要
企业网络中,服务质量(QoS)的保障是确保业务顺畅和用户体验的关键因素。流量整形技术通过对网络流量进行精确控制,帮助管理员合理分配带宽资源,优化网络性能。本文首先概述了QoS的概念及其在网络中的必要性,随后深入探讨了流量整形的基础理论,包括QoS的分类、流量整形与监管的区别,以及令牌桶和漏桶算法的原理与应用场景。高级配置部分详述了如何实现这些算法的实际配置。实践应用章节则分析了企业网络
【映射系统扩展性设计】:构建可扩展映射系统的5个关键步骤
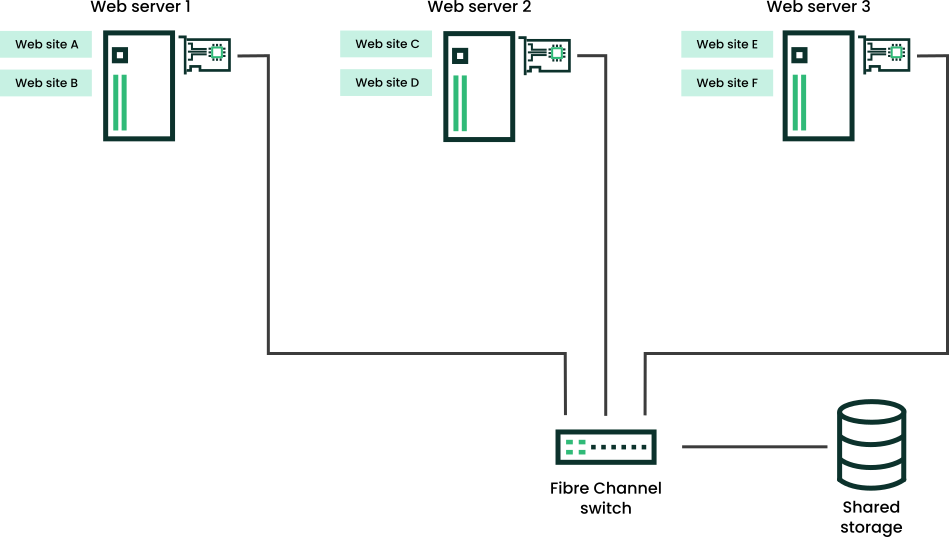
# 摘要
映射系统扩展性设计对于满足现代应用的性能和规模需求至关重要。本文从映射系统的需求分析入手,详细探讨了性能瓶颈、可扩展性挑战及其解决方案。文章深入讨论了技术栈选择、微服务架构及无服务器架构的实践应用,并具体分析了数据层、应用层和网络层的扩展性设计。最后,本文提出了一套扩展性测试方法论,涵盖了性能监控、故障注入和持续优化的策略,以确保映射系
【能研BT-C3100充电器性能剖析】:揭秘其核心功能与高效充电原理(技术深度解析)

# 摘要
本文全面概述了能研BT-C3100充电器的关键特性和工作原理,分析了其核心功能的理论基础,包括电力转换、充电协议、高效充电技术和安全机制。性能参数的详尽解析揭示了充电器在功能性参数和充电效率方面的能力。文中还探讨了充电器的设计细节,制造工艺以及市场应用和用户体验,最后展望了充电技术创新与未来发展的方向,强调了
【MATLAB信号处理全攻略】:掌握从生成到分析的20大核心技巧
# 摘要
本文系统地介绍了MATLAB在信号处理领域的应用,从信号生成与变换的基础技巧开始,逐步深入至信号分析的核心方
网络性能提升利器:STP协议数据格式调整的实用技巧
# 摘要
本文全面介绍了STP协议的基本概念、工作原理、配置优化以及网络性能的重要性。深入分析了STP的工作机制,包括根桥选举过程、端口状态转换,以及如何通过配置命令和调整STP计时器来优化网络。特别探讨了STP数据格式及其在RSTP中的应用和优势,以及在不同网络设计中
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )