
A U T O W A R E - U S E R S - M A N U A L
" ,&
The generated path includes appropriate speed information. Autonomous driving system
uses it as the target speed. In addition, the route includes landmarks, “way point”, set at 1m
intervals. The autonomous driving system operates “path following” by following the way
points. Referring near way points on curves and distant way points on straights stabilizes
autonomous driving. If ego-vehicle deviates from the route, the system aims to the vicinity
point and back to the target route. Note that the safest path is selected by the driving
system
(!
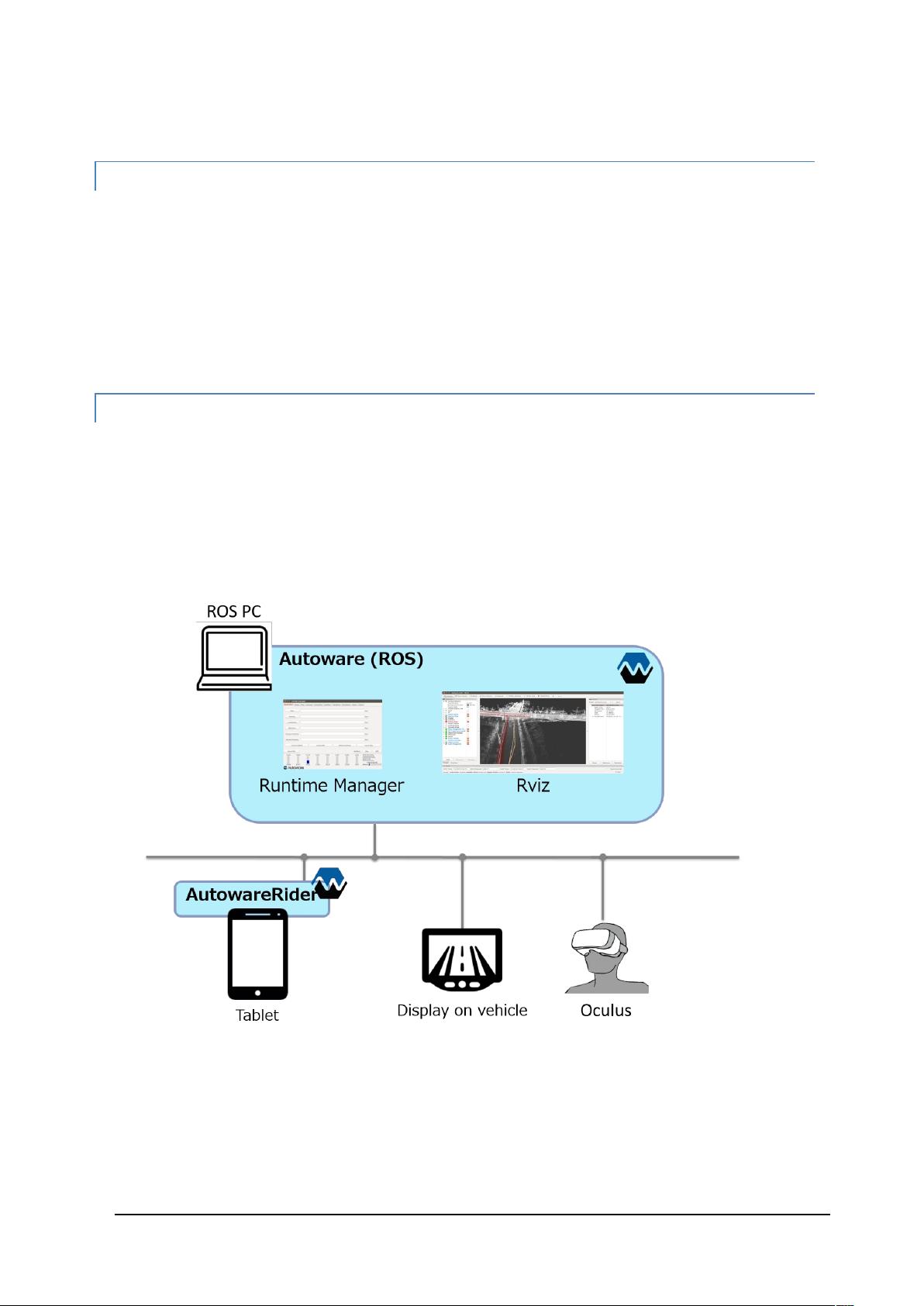
A user interface called “Runtime Manager” of Autoware enables developers to operate
functions, such as localization, object detection, and path following, easily. In addition, RViz
can integrate and visualize localization on 3-D map, object detection, path planning, and
path following. Furthermore, a tablet user interface, “AutowareRider”, of Autoware enables
navigation, path planning, transition to autonomous driving mode and etc., on tables,
easily. Moreover, Autoware can visualize 3-D map used in autonomous driving system and
project it on on-vehicle displays and Oculus devices.
Page 11
Figure 2 User interface
剩余63页未读,继续阅读

shuimanting520
- 粉丝: 354
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- OptiX传输试题与SDH基础知识
- C++Builder函数详解与应用
- Linux shell (bash) 文件与字符串比较运算符详解
- Adam Gawne-Cain解读英文版WKT格式与常见投影标准
- dos命令详解:基础操作与网络测试必备
- Windows 蓝屏代码解析与处理指南
- PSoC CY8C24533在电动自行车控制器设计中的应用
- PHP整合FCKeditor网页编辑器教程
- Java Swing计算器源码示例:初学者入门教程
- Eclipse平台上的可视化开发:使用VEP与SWT
- 软件工程CASE工具实践指南
- AIX LVM详解:网络存储架构与管理
- 递归算法解析:文件系统、XML与树图
- 使用Struts2与MySQL构建Web登录验证教程
- PHP5 CLI模式:用PHP编写Shell脚本教程
- MyBatis与Spring完美整合:1.0.0-RC3详解
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


