【Practical Exercise】Designing a Robotic Arm Control System Using Simulink
发布时间: 2024-09-14 04:48:36 阅读量: 37 订阅数: 22 
# 2.1 How Simulink Works and Its Basic Components
Simulink is a graphical modeling and simulation environment based on a Graphical User Interface (GUI), developed on top of the MATLAB platform. Its operational principle involves representing models as block diagrams composed of fundamental components, interconnected by signal lines.
The basic components of Simulink include:
- **Source Blocks:** Blocks that generate input signals or data, such as constants, sine waves, pulses, etc.
- **Sink Blocks:** Blocks that receive and display output signals or data, such as oscilloscopes, data recorders, etc.
- **Operation Blocks:** Blocks that perform mathematical operations or logical operations, such as adders, multipliers, comparators, etc.
- **System Blocks:** Blocks representing subsystems, which can encapsulate complex functions or models.
- **Signal Lines:** Lines connecting components and transmitting signals.
# 2. Simulink Modeling Basics
### 2.1 How Simulink Works and Its Basic Components
Simulink is a graphical programming environment within MATLAB for modeling, simulating, and analyzing dynamic systems. It is based on the block diagram principle, allowing users to construct system models using predefined modules called blocks.
The operational principle of Simulink is as follows:
- **Model Creation:** Users create models using a drag-and-drop interface, connecting blocks to represent system behavior.
- **Simulation:** Once the model is created, Simulink employs numerical integrators to solve model equations and generate the system's output.
- **Analysis:** After simulation, users can analyze the output data and use various tools (such as oscilloscopes and data recorders) to visualize and analyze system behavior.
The basic components of Simulink include:
- **Blocks:** Modules representing specific functions or behaviors within the system, such as adders, integrators, and controllers.
- **Connections:** Lines connecting blocks to represent signal flow.
- **Subsystems:** Allow users to break down complex models into smaller modules, enhancing readability and maintainability.
- **Simulation Parameters:** Settings defining the simulation process, such as simulation time step and solver options.
### 2.2 Model Creation and Simulation Workflow
Creating a Simulink model and performing a simulation involve the following steps:
1. **Create a New Model:** In MATLAB, click "File" > "New" > "Model."
2. **Add Blocks:** Drag blocks from the Simulink library into the model window.
3. **Connect Blocks:** Use connections to link blocks, indicating signal flow.
4. **Set Simulation Parameters:** In the "Simulation" tab, set simulation time step, solver options, and other simulation settings.
5. **Run the Simulation:** Click the "Run" button to start the simulation.
6. **Analyze Results:** After the simulation, use oscilloscopes, data recorders, and other tools to analyze the output data.
**Code Block:**
```matlab
% Create an adder block
addBlock('simulink/Math Operations/Add');
% Set the inputs of the adder block
addBlockParameter('Add', 'Inputs', '2');
% Set the outputs of the adder block
addBlockParameter('Add', 'Outputs', '1');
% Connect the inputs and outputs of the adder block
connect('In1', 'Add/1');
connect('In2', 'Add/2');
connect('Add/1', 'Out');
```
**Logical Analysis:**
This code block creates an adder block with two inputs and one output. It sums the input signals `In1` and `In2` and stores the result in the output signal `Out`.
# 3.1 Kinematic Analysis of Robotic Ar

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
索引与数据结构选择:如何根据需求选择最佳的Python数据结构
# 1. Python数据结构概述
Python是一种广泛使用的高级编程语言,以其简洁的语法和强大的数据处理能力著称。在进行数据处理、算法设计和软件开发之前,了解Python的核心数据结构是非常必要的。本章将对Python中的数据结构进行一个概览式的介绍,包括基本数据类型、集合类型以及一些高级数据结构。读者通过本章的学习,能够掌握Python数据结构的基本概念,并为进一步深入学习奠
【Python排序与异常处理】:优雅地处理排序过程中的各种异常情况
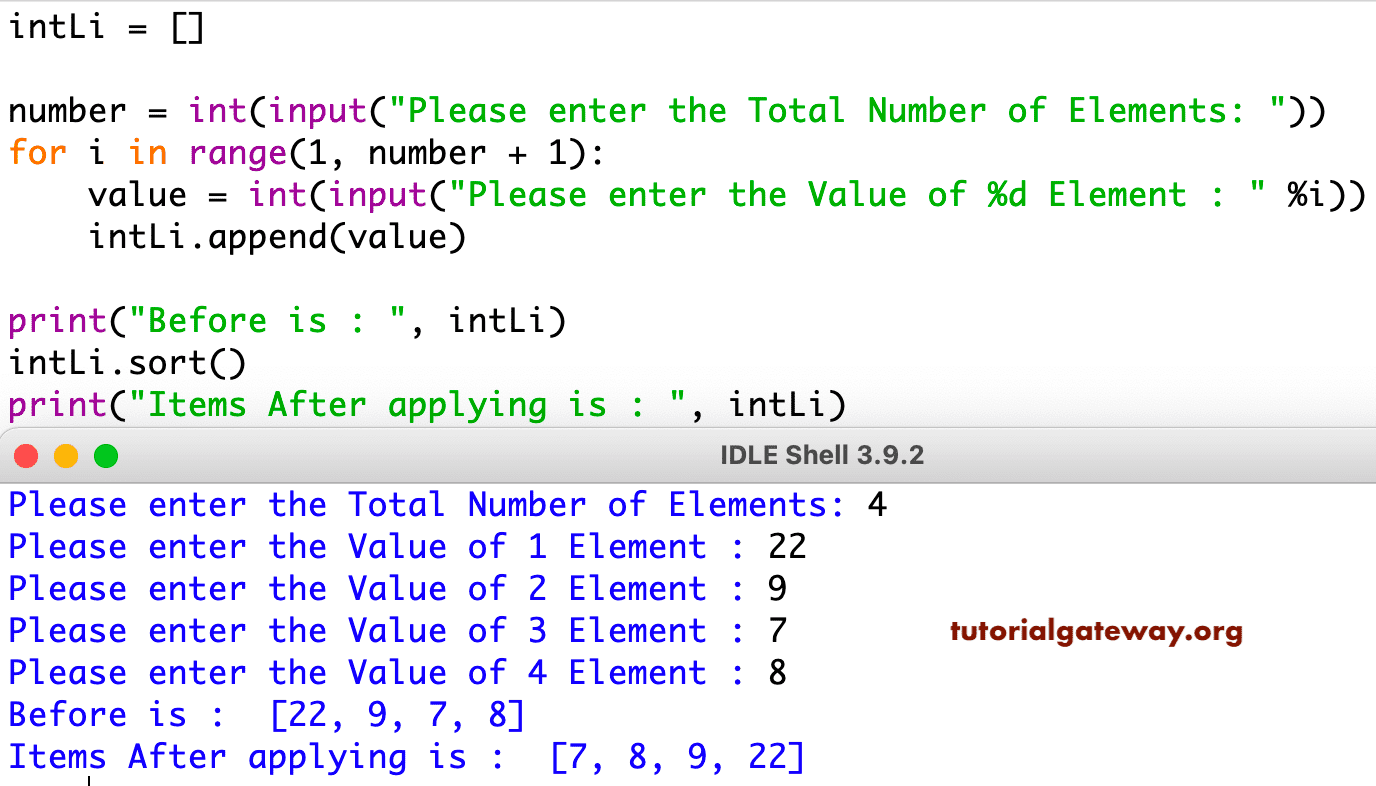
# 1. Python排序算法概述
排序算法是计算机科学中的基础概念之一,无论是在学习还是在实际工作中,都是不可或缺的技能。Python作为一门广泛使用的编程语言,内置了多种排序机制,这些机制在不同的应用场景中发挥着关键作用。本章将为读者提供一个Python排序算法的概览,包括Python内置排序函数的基本使用、排序算法的复杂度分析,以及高级排序技术的探
Python并发控制:在多线程环境中避免竞态条件的策略

# 1. Python并发控制的理论基础
在现代软件开发中,处理并发任务已成为设计高效应用程序的关键因素。Python语言因其简洁易读的语法和强大的库支持,在并发编程领域也表现出色。本章节将为读者介绍并发控制的理论基础,为深入理解和应用Python中的并发工具打下坚实的基础。
## 1.1 并发与并行的概念区分
首先,理解并发和并行之间的区别至关重要。并发(Concurre
Python list remove与列表推导式的内存管理:避免内存泄漏的有效策略
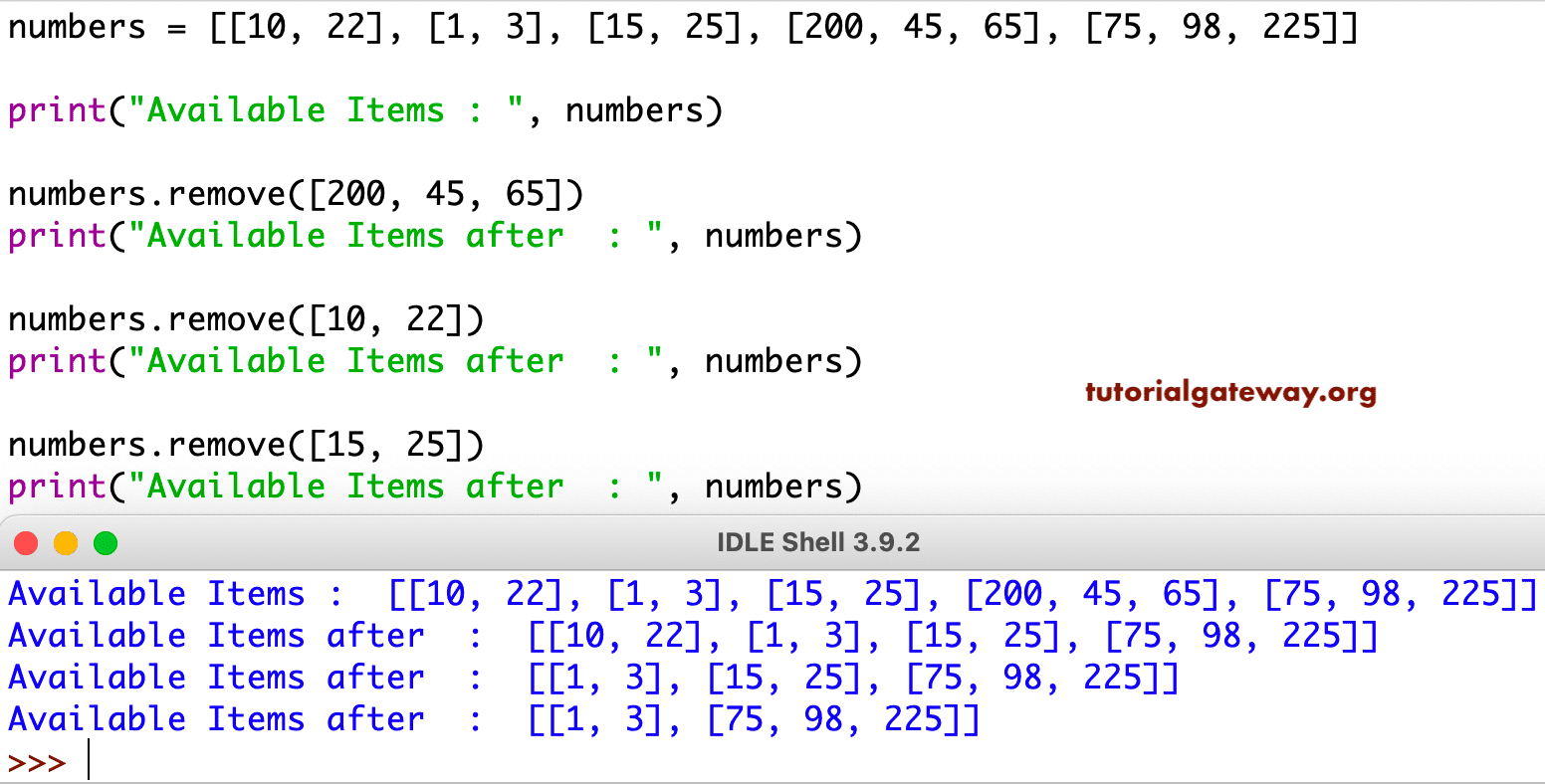
# 1. Python列表基础与内存管理概述
Python作为一门高级编程语言,在内存管理方面提供了众多便捷特性,尤其在处理列表数据结构时,它允许我们以极其简洁的方式进行内存分配与操作。列表是Python中一种基础的数据类型,它是一个可变的、有序的元素集。Python使用动态内存分配来管理列表,这意味着列表的大小可以在运行时根据需要进
【持久化存储】:将内存中的Python字典保存到磁盘的技巧

# 1. 内存与磁盘存储的基本概念
在深入探讨如何使用Python进行数据持久化之前,我们必须先了解内存和磁盘存储的基本概念。计算机系统中的内存指的
Python列表的函数式编程之旅:map和filter让代码更优雅
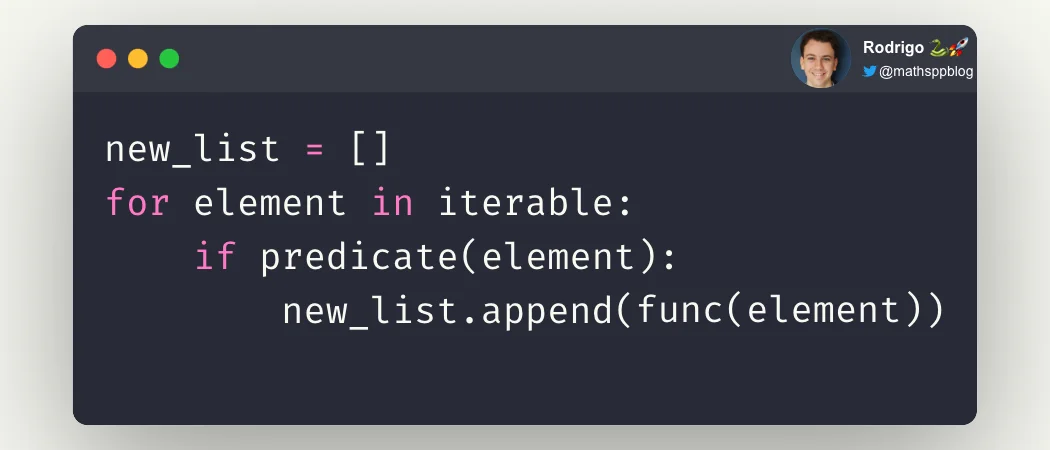
# 1. 函数式编程简介与Python列表基础
## 1.1 函数式编程概述
函数式编程(Functional Programming,FP)是一种编程范式,其主要思想是使用纯函数来构建软件。纯函数是指在相同的输入下总是返回相同输出的函数,并且没有引起任何可观察的副作用。与命令式编程(如C/C++和Java)不同,函数式编程
Python索引的局限性:当索引不再提高效率时的应对策略

# 1. Python索引的基础知识
在编程世界中,索引是一个至关重要的概念,特别是在处理数组、列表或任何可索引数据结构时。Python中的索引也不例外,它允许我们访问序列中的单个元素、切片、子序列以及其他数据项。理解索引的基础知识,对于编写高效的Python代码至关重要。
## 理解索引的概念
Python中的索引从0开始计数。这意味着列表中的第一个元素
【Python编码问题】:一文理解并解决编码不一致问题

# 1. Python编码问题概述
## 1.1 编码问题的定义
编码问题是编程中常见的一个头疼的问题,尤其在使用Python这种对字符处理有着丰富支持的语言时更是如此。简单来说,编码问题是指计算机在处理文本数据时,因字符集和编码方式不一致导致的错误或不预期的行为。
## 1.2 编码问题的重要性
在软件开发中,编码问题可
Python测试驱动开发(TDD)实战指南:编写健壮代码的艺术
# 1. 测试驱动开发(TDD)简介
测试驱动开发(TDD)是一种软件开发实践,它指导开发人员首先编写失败的测试用例,然后编写代码使其通过,最后进行重构以提高代码质量。TDD的核心是反复进行非常短的开发周期,称为“红绿重构”循环。在这一过程中,"红"代表测试失败,"绿"代表测试通过,而"重构"则是在测试通过后,提升代码质量和设计的阶段。TDD能有效确保软件质量,促进设计的清晰度,以及提高开发效率。尽管它增加了开发初期的工作量,但长远来
Python在语音识别中的应用:构建能听懂人类的AI系统的终极指南

# 1. 语音识别与Python概述
在当今飞速发展的信息技术时代,语音识别技术的应用范围越来越广,它已经成为人工智能领域里一个重要的研究方向。Python作为一门广泛应用于数据科学和机器学习的编程语言,因其简洁的语法和强大的库支持,在语音识别系统开发中扮演了重要角色。本章将对语音识别的概念进行简要介绍,并探讨Python在语音识别中的应用和优势。
语音识别技术本质上是计算机系统通过算法将人类的语音信号转换
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )