【Advanced】Single-Phase Half-Wave Controlled Rectifier Circuit Simulink MATLAB Simulation Model
发布时间: 2024-09-14 04:26:27 阅读量: 42 订阅数: 45 

single_phase_half_controlled rectifier:single_phase_half_controlled rectifier using simulink-matlab开发
# 1. Modeling Circuit Components
Modeling of circuit components is crucial in Simulink as it determines the accuracy and reliability of the simulation model. Simulink offers a rich library of pre-defined models for a variety of circuit components.
**2.1.1 Diode Model**
The diode model in Simulink is a module used to simulate the behavior of diodes. It has two terminals, an anode, and a cathode. When the anode voltage is higher than the cathode voltage, the diode conducts, allowing current to flow from the anode to the cathode. Otherwise, the diode is off, ***mon diode models in Simulink include the ideal diode, Schottky diode, and Zener diode.
**Code Block:**
```
% Create an ideal diode
ideal_diode = ***ponents.IdealDiode;
% Set diode parameters
ideal_diode.ForwardVoltageDrop = 0.7; % Forward voltage drop
ideal_diode.ReverseBreakdownVoltage = -100; % Reverse breakdown voltage
```
# 2. Simulink Modeling Techniques
Simulink is a powerful tool in MATLAB for modeling and simulating dynamic systems. In the simulation of a single-phase half-wave controlled rectifier circuit, Simulink provides an intuitive graphical interface that makes it easy to construct and simulate circuit models. This section will introduce Simulink modeling techniques, including the modeling of circuit components and the setup of simulation parameters.
### 2.1 Modeling of Circuit Components
Simulink provides a series of libraries with pre-built models of various circuit components. These models can be conveniently dragged into Simulink models to quickly build circuit models.
#### 2.1.1 Diode Model
The diode is a key component in a single-phase half-wave controlled rectifier circuit. Simulink offers various diode models, including the ideal diode, Schottky diode, and Zener diode. For the single-phase half-wave controlled rectifier circuit, the ideal diode model is commonly used.
```
% Create an ideal diode model
diode = ***ponents.IdealDiode;
% Set diode parameters
diode.ForwardVoltageDrop = 0.7; % Forward voltage drop
diode.ReverseBreakdownVoltage = -100; % Reverse breakdown voltage
```
#### 2.1.2 Inductor Model
Inductors are also important components in a single-phase half-wave controlled rectifier circuit. Simulink offers various inductor models, including the ideal inductor, saturable inductor, and transformer. For the single-phase half-wave controlled rectifier circuit, the ideal inductor model is commonly used.
```
% Create an ideal inductor model
inductor = ***ponents.Inductor;
% Set inductor parameters
inductor.Inductance = 10e-3; % Inductance value
```
#### 2.1.3 Resistor Model
Resistors are commonly used components in a single-phase half-wave controlled rectifier circuit. Simulink offers various resistor models, including the ideal resistor, nonlinear resistor, and thermistor. For the single-phase half-wave controlled rectifier circuit, the ideal resistor model is commonly used.
```
% Create an ideal resistor model
resistor = ***ponents.Resistor;
% Set resistor parameters
resistor.Resistance = 100; % Resistance value
```
### 2.2 Setting Simulation Parameters
Simulation parameters are important factors that affect the results of Simulink simulations. These parameters include sample time, simulation step size, and simulation time.
#### 2.2.1 Sample Time
Sample time is the interval used by Simulink to discretize continuous-time models. A smaller sample time can improve simulation accuracy but will also increase simulation time. For the single-phase half-wave controlled rectifier circuit, a sample time of 1e-6 seconds is commonly used.
#### 2.2.2 Simulation Step Size
Simulation step size is the interval Simulink uses to solve differential equations. A smaller step size can improve simulation accuracy but will also increase simulation time. For the single-phase half-wave controlled rectifier circuit, a simulation step size of 1e-6 seconds is commonly used.
#### 2.2.3 Simulation Time
Simulation time is the total time Simulink uses to run simulations. The simulation time should be long enough to capture both the steady-state and transient responses of the circuit. For the single-phase half-wave controlled rectifier circuit, a simulation time of 0.1 seconds is commonly used.
# 3. MATLAB Simulation Programming
### 3.1 Signal Generation
MATLAB provides a rich library of functions to easily generate various types of signals.
#### 3.1.1 Sine Signal
```
t = 0:0.001:1; % Time vector
f = 50; % Frequency
A = 1; % Amplitude
x = A * sin(2 * pi * f * t); % Sine signal
```
**Code Logic Interpretation:**
* `t` is a time vector that specifies the sampling time interval of the signal.
* `f` is the frequency of the sine signal.
* `A` is the amplitude of the sine signal.
* `x` is the generated sine signal.
#### 3.1.2 Pulse Signal
```
t = 0:0.001:1; % Time vector
f = 50; % Frequency
A = 1; % Amplitude
duty = 0.5; % Duty cycle
x = A * square(2 * pi * f * t, duty); % Pulse signal
```
**Code Logic Interpretation:**
* `t` is a time vector that specifies the sampling time interval of the signal.
* `f` is the frequency of the pulse signal.
* `A` is the amplitude of the pulse signal.
* `duty` is the duty cycle of the pulse signal.
* `x` is the generated pulse signal.
#### 3.1.3 Random Signal
```
t = 0:0.001:1; % Time vector
n = randn(size(t)); % Generate normally distributed random numbers
x = n; % Random signal
```
**Code Logic Interpretation:**
* `t` is a time vector that specifies the sampling time interval of the signal.
* `n` is a normally distributed random number.
* `x` is the generated random signal.
### 3.2 Data Processing
MATLAB provides powerful data processing capabilities that can perform various operations on signals.
#### 3.2.1 Signal Filtering
```
x = randn(1000); % Generate normally distributed random signal
y = filter(b, a, x); % Filtered signal
```
**Code Logic Interpretation:**
* `x` is a normally distributed random signal.
* `b` and `a` are filter coefficients.
* `y` is the filtered signal.
#### 3.2.2 Data Visualization
```
t = 0:0.001:1; % Time vector
x = sin(2 * pi * 50 * t); % Sine signal
plot(t, x); % Plot the sine signal
```
**Code Logic Interpretation:**
* `t` is a time vector that specifies the sampling time interval of the signal.
* `x` is a sine signal.
* `plot(t, x)` plots the sine signal.
### 3.3 Result Analysis
MATLAB provides a rich set of analysis tools that can perform various analyses on signals.
#### 3.3.1 Waveform Analysis
```
t = 0:0.001:1; % Time vector
x = sin(2 * pi * 50 * t); % Sine signal
[peak, peak_index] = max(x); % Find peak value
[trough, trough_index] = min(x); % Find trough value
```
**Code Logic Interpretation:**
* `t` is a time vector that specifies the sampling time interval of the signal.
* `x` is a sine signal.
* `max(x)` finds the peak value of the sine signal.
* `min(x)` finds the trough value of the sine signal.
#### 3.3.2 Harmoni

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
半导体设备通信解决方案:SECS-II如何突破传统挑战
# 摘要
SECS-II协议作为半导体设备通信的关键技术,其在现代智能制造中扮演着至关重要的角色。本文首先概述了SECS-II协议的理论基础,包括架构模型、关键组件及数据交换流程,特别强调了在半导体设备中应用的挑战。接着,文章探讨了SECS-II协议的实践操作,涉及配置安装、编程实施和测试维护等方面,并分析了实际应用案例。文章进一步讨论了性能优化和安全机制,以及如何通过加密和认
等价类划分技术:软件测试实战攻略,5大练习题全解析

# 摘要
等价类划分技术是软件测试领域中的一个重要方法,它通过对输入数据的分类,以减少测试用例的数量,同时保持对软件功能的全面覆盖。本文从理论基础出发,详细介绍了等价类的定义、特性、分类及其划分方法。随后,探讨了等价类划分在功能测试、性能测试和安全测试中的实际应用,以及如何在不同场景下有效利用。通过分析电商网站、移动应用和企业级系统等不同类型的项目案例,本文进一步阐述了等价类划分技术的应用实践,并分享了实战技
NModbus在工业自动化中的应用:案例研究与实践策略

# 摘要
NModbus协议作为工业自动化领域广泛应用的通信协议,对于实现不同工业设备之间的数据交换和控制起着至关重要的作用。本文首先介绍了NModbus在工业自动化中的基础角色和理论架构,包括其发展历程、种类、通信模型以及数据封装与错误检测机制。随后,详细探讨了NModbus在PLC、SCADA系统以及工业物联网设备中的实际应用,重点分析了整
【Logisim-MA潜能挖掘】:打造32位ALU设计的最佳实践

# 摘要
本文详细介绍了Logisim-MA工具在32位算术逻辑单元(ALU)设计中的应用,阐述了ALU的功能、结构和核心设计原则。通过理论分析和实践操作,本文展示了如何利用Logisim-MA构建基础和优化后的32位ALU,强调了其在教育和实验中的优势。同时,本文探讨了ALU的微架构优化、片上系统集成以及未来设计
【电力系统可靠性保证】:输电线路模型与环境影响评估的融合

# 摘要
本文全面概述了电力系统可靠性的重要性,并对输电线路模型理论进行了深入分析。文章首先介绍了电力系统的基本概念及其可靠性对电力供应稳定性的关键作用,随后探讨了影响电力系统可靠性的各种因素。接着,文章重点分析了输电线路的基本构成、工作机制、常见故障类型及其机理,并详细介绍了输电线路可靠性模型的构建过程。此外,本文还探讨了环境影响评估的基本概念、框架、
【PDF加密工具对比分析】:选择适合自己需求的加密软件
:max_bytes(150000):strip_icc()/puran-file-recovery-1-2-windows-8-1-56a6f9405f9b58b7d0e5c777.png)
# 摘要
本文详细探讨了PDF加密的基本概念、技术原理及其在不同场景下的重要性。通过对加密类型与标准、安全性考量、常用加密工具的功能与性能对比,以及未来趋势的分析,本文旨
YOLO8算法深度解析与演进之旅:从YOLOv1到YOLOv8的完整揭秘

# 摘要
YOLO算法作为一种实时目标检测系统,自首次推出以来经历了飞速的发展和演进。本文全面回顾了YOLO从初期版本到最新版本的发展历程,概述了YOLOv1的基础架构、原理及其性能评估。随后,详细探讨了YOLO算法从YOLOv2到YOLOv8的演进路径,特别强
Eclipse下载到配置:一步到位搞定最新版Java开发环境
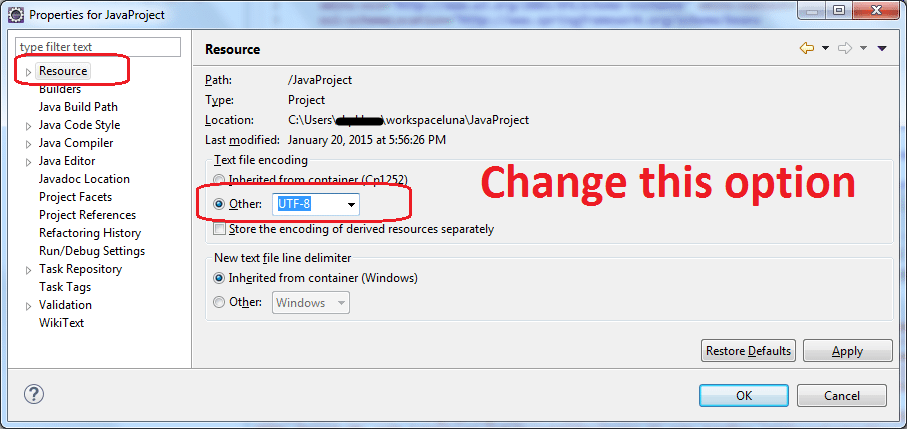
# 摘要
Eclipse作为广受欢迎的集成开发环境(IDE),对于Java开发人员来说是一个功能强大的工具。本文旨在详细介绍Eclipse的下载、安装、配置、优化以及在Java开发中的应用实践。文章首先介绍了如何选择合适的Eclipse版本和进行系统要求分析,并提供了详细的安装步骤。其次,文章深入探讨了工作区和运行环境设置、插
案例研究:【TST网络在行业中的应用】与实际效果

# 摘要
TST网络技术作为一种创新的网络解决方案,在多个行业领域展现出了广泛的应用潜力和价值。本文首先介绍了TST网络技术的架构特点和核心性能指标,随后探讨了它在满足特定行业需求方面的适应性,并提供了理论模型支持其部署。通过具体案例,评估了TST网络在智能制造、智慧城市和医疗健康行业的实际应用效果。文章还分析了TST网络的性能评估方法和面临的问题,提出了应对策略。最后,本文展望了TST网络
Lego自动化测试脚本编写:入门到精通的基础操作教程
# 摘要
本文系统性地介绍Lego自动化测试脚本的核心概念、编写基础、实践应用、进阶学习以及优化和维护的方法。通过对Lego自动化测试脚本的类型、应用场景、编写环境、规则技巧和常见问题的探讨,深入分析了其在自动化测试中的实际操作和高级应用,包括数据驱动测试和关键字驱动测试等高级功能。此外,本文还强调了脚本性能优化和维护更新的策略,以及对Lego自动
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )