【Practical Exercise】MATLAB Simulink Ship Dynamic Positioning Simulator
发布时间: 2024-09-14 04:56:55 阅读量: 44 订阅数: 47 

matlab simulink仿真资源.docx
# Introduction to MATLAB Simulink
MATLAB Simulink is a graphical modeling and simulation software developed by MathWorks, widely used in engineering, science, and education. It offers a rich library of modules and simulation environments, enabling engineers to quickly build and simulate complex systems.
The core concept of Simulink is block diagram modeling, where each module represents a specific function or component. Users can create system models by dragging and dropping modules and connecting them. Simulink provides a wide range of module libraries covering signal processing, control systems, dynamics, and communications, among other areas.
In addition, Simulink supports custom module development, allowing users to create their own modules to extend its functionality. This makes Simulink a highly flexible simulation platform capable of meeting various modeling and simulation needs.
# Theoretical Foundation of Marine Dynamic Positioning
### 2.1 Principle of Dynamic Positioning System
A Dynamic Positioning (DP) system is an advanced control system designed to keep a vessel at a specified position and heading, unaffected by external forces such as wind, waves, and currents. DP systems achieve this through the use of thrusters, rudders, and sensors.
**Thrusters and Rudders**
DP systems use thrusters and rudders to generate thrust and torque to control the vessel's movements. Thrusters are typically installed at the bow, stern, and sides of the vessel, while rudders are mounted at the stern.
**Sensors**
DP systems utilize various sensors to measure the vessel's position, heading, and speed. These sensors include:
- **GPS (Global Positioning System):** Used to measure the vessel's absolute position.
- **IMU (Inertial Measurement Unit):** Used to measure the vessel's motion and heading.
- **Anemometer and Wind Vane:** Used to measure wind force.
- **Wave Sensor:** Used to measure wave height and period.
### 2.2 Control Algorithm Design
The control algorithm of the DP system is responsible for calculating the required thrust and torque based on sensor data to keep the vessel at the specified position and heading. The control algorithm typically follows these steps:
1. **Reference Point Calculation:** Calculate the vessel's reference position and heading.
2. **Error Calculation:** Calculate the error between the vessel's current position and heading and the reference point.
3. **Control Law Design:** Design the control law to calculate the required thrust and torque based on the error.
4. **Thrust Allocation:** Allocate the required thrust and torque to the thrusters and rudders.
**Control Law Design**
***mon control laws include:
- **Proportional-Integral-Derivative (PID) Control:** The most commonly used control law, it calculates the control amount based on the error's proportion, integral, and derivative.
- **State Feedback Control:** This control law uses the vessel's state (position, speed, acceleration, etc.) to calculate the control amount.
- **Model Predictive Control:** This control law uses the vessel's mathematical model to predict future movements and calculates the control amount based on these predictions.
**Thrust Allocation**
Thrust allocation is the process of assigning the required thrust and torque to the thrusters and rudders. Thrust allocation algorithms typically consider the following factors:
- **Thruster Efficiency:** Different thrusters have different efficiencies, so it is necessary to consider thruster efficiency to optimize thrust allocation.
- **Vessel Dynamics:** The dynamic characteristics of the vessel (e.g., resistance, inertia) will affect thrust allocation.
- **Safety Constraints:** Thrust allocation must satisfy safety constraints, such as maximum thruster force and maximum rudder angle.
# Simulink Modeling Practices
### 3.1 Establishing a Marine Dynamics Model
**3.1.1 Marine Motion Equations**
The marine dynamics model describes the vessel's motion state under the action of external environmental forces. The motion equations are as follows:
```
m(u - v) = X_H + X_P + X_R
m(v + u) = Y_H + Y_P + Y_R
I_z(r - p) = N_H + N_P + N_R
```
Where:
- $m$ is the mass of the vessel
- $u$ is the vessel's longitudinal speed
- $v$ is the vessel's lateral speed
- $r$ is the vessel's heading angular velocity
- $p$ is the vessel's lateral angular velocity
- $X_H$、$Y_H$、$N_H$ are the hydrodynamic forces
- $X_P$、$Y_P$、$N_P$ are the propulsion forces
- $X_R$、$Y_R$、$N_R$ are the damping forces
**3.1.2 Simulink Model Construction**
Based on the marine motion equations, a marine dynamics model can be established in Simulink, as shown in the following figure:
[Image: Marine Dynamics Model Simulink Model]
In the model, the functions of each module are as follows:
- **Hull Dynamics:** Calculates the vessel's hydrodynamic forces
- **Propuls

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【EDA课程进阶秘籍】:优化仿真流程,强化设计与仿真整合

# 摘要
随着集成电路设计复杂性的增加,EDA(电子设计自动化)课程与设计仿真整合的重要性愈发凸显。本文全面探讨了EDA工具的基础知识与应用,强调了设计流程中仿真验证和优化的重要性。文章分析了仿真流程的优化策略,包括高
DSPF28335 GPIO故障排查速成课:快速解决常见问题的专家指南

# 摘要
本文详细探讨了DSPF28335的通用输入输出端口(GPIO)的各个方面,从基础理论到高级故障排除策略,包括GPIO的硬件接口、配置、模式、功能、中断管理,以及在实践中的故障诊断和高级故障排查技术。文章提供了针对常见故障类型的诊断技巧、工具使用方法,并通过实际案例分析了故障排除的过程。此外,文章还讨论了预防和维护GPIO的策略,旨在帮助
掌握ABB解包工具的最佳实践:高级技巧与常见误区

# 摘要
本文旨在介绍ABB解包工具的基础知识及其在不同场景下的应用技巧。首先,通过解包工具的工作原理与基础操作流程的讲解,为用户搭建起使用该工具的初步框架。随后,探讨了在处理复杂包结构时的应用技巧,并提供了编写自定义解包脚本的方法。文章还分析了在实际应用中的案例,以及如何在面对环境配置错误和操
【精确控制磁悬浮小球】:PID控制算法在单片机上的实现
# 摘要
本文综合介绍了PID控制算法及其在单片机上的应用实践。首先概述了PID控制算法的基本原理和参数整定方法,随后深入探讨了单片机的基础知识、开发环境搭建和PID算法的优化技术。通过理论与实践相结合的方式,分析了PID算法在磁悬浮小球系统中的具体实现,并展示了硬件搭建、编程以及调试的过程和结果。最终,文章展望了PID控制算法的高级应用前景和磁悬浮技术在工业与教育中的重要性。本文旨在为控制工程领
图形学中的纹理映射:高级技巧与优化方法,提升性能的5大策略
# 摘要
本文系统地探讨了纹理映射的基础理论、高级技术和优化方法,以及在提升性能和应用前景方面的策略。纹理映射作为图形渲染中的核心概念,对于增强虚拟场景的真实感和复杂度至关重要。文章首先介绍了纹理映射的基本定义及其重要性,接着详述了不同类型的纹理映射及应用场景。随后,本文深入探讨了高级纹理映射技术,包括纹理压缩、缓存与内存管理和硬件加速,旨在减少资源消耗并提升
【Typora插件应用宝典】:提升写作效率与体验的15个必备插件
# 摘要
本论文详尽探讨了Typora这款Markdown编辑器的界面设计、编辑基础以及通过插件提升写作效率和阅读体验的方法。文章首先介绍了Typora的基本界面与编辑功能,随后深入分析了多种插件如何辅助文档结构整理、代码编写、写作增强、文献管理、多媒体内容嵌入及个性化定制等方面。此外,文章还讨论了插件管理、故障排除以及如何保证使用插件时
RML2016.10a字典文件深度解读:数据结构与案例应用全攻略
# 摘要
本文全面介绍了RML2016.10a字典文件的结构、操作以及应用实践。首先概述了字典文件的基本概念和组成,接着深入解析了其数据结构,包括头部信息、数据条目以及关键字与值的关系,并探讨了数据操作技术。文章第三章重点分析了字典文件在数据存储、检索和分析中的应用,并提供了实践中的交互实例。第四章通过案例分析,展示了字典文件在优化、错误处理、安全分析等方面的应用及技巧。最后,第五章探讨了字典文件的高
【Ansoft软件精通秘籍】:一步到位掌握电磁仿真精髓
# 摘要
本文详细介绍了Ansoft软件的功能及其在电磁仿真领域的应用。首先概述了Ansoft软件的基本使用和安装配置,随后深入讲解了基础电磁仿真理论,包括电磁场原理、仿真模型建立、仿真参数设置和网格划分的技巧。在实际操作实践章节中,作者通过多个实例讲述了如何使用Ansoft HFSS、Maxwell和Q3D Extractor等工具进行天线、电路板、电机及变压器等的电磁仿真。进而探讨了Ansoft的高级技巧
负载均衡性能革新:天融信背后的6个优化秘密
# 摘要
负载均衡技术是保障大规模网络服务高可用性和扩展性的关键技术之一。本文首先介绍了负载均衡的基本原理及其在现代网络架构中的重要性。继而深入探讨了天融信的负载均衡技术,重点分析了负载均衡算法的选择标准、效率与公平性的平衡以及动态资源分配机制。本文进一步阐述了高可用性设计原理,包括故障转移机制、多层备份策略以及状态同步与一致性维护。在优化实践方面,本文讨论了硬件加速、性能调优、软件架构优化以及基于AI的自适应优化算法。通过案例
【MAX 10 FPGA模数转换器时序控制艺术】:精确时序配置的黄金法则
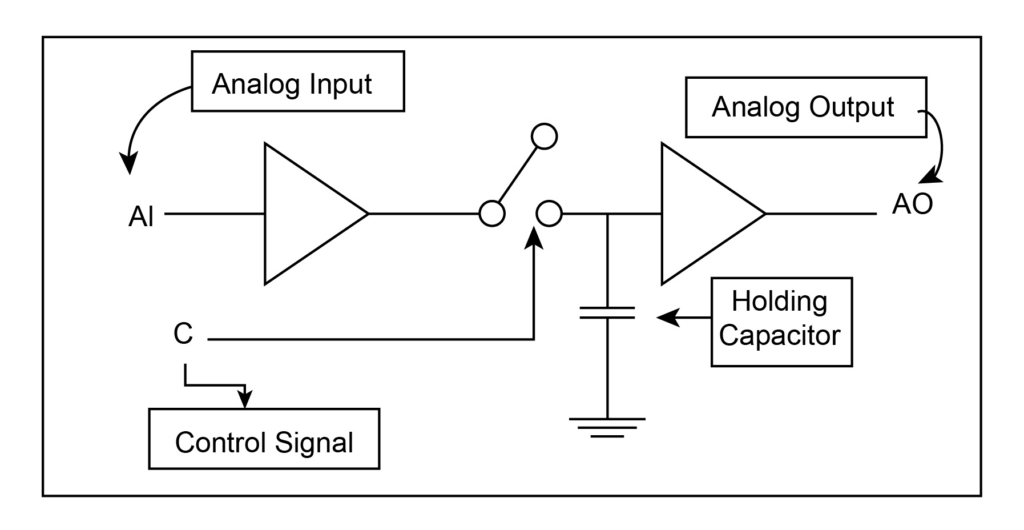
# 摘要
本文主要探讨了FPGA模数转换器时序控制的基础知识、理论、实践技巧以及未来发展趋势。首先,从时序基础出发,强调了时序控制在保证FPGA性能中的重要性,并介绍了时序分析的基本方法。接着,在实践技巧方面,探讨了时序仿真、验证、高级约束应用和动态时序调整。文章还结合MAX 10 FPGA的案例,详细阐述了模数转换器的
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )