【实战演练】强化学习项目:Q-learning入门
发布时间: 2024-06-26 15:17:50 阅读量: 84 订阅数: 124 

强化学习 Q-learning

# 2.1 马尔可夫决策过程(MDP)
马尔可夫决策过程(MDP)是强化学习的基础,它描述了一个具有以下特征的决策环境:
* **状态空间(S):**环境中所有可能的状态的集合。
* **动作空间(A):**从每个状态可以采取的所有动作的集合。
* **状态转移概率(P):**给定状态 s 和动作 a,转移到状态 s' 的概率。
* **奖励函数(R):**从状态 s 采取动作 a 获得的奖励。
在 MDP 中,代理根据当前状态选择动作,并根据状态转移概率和奖励函数获得反馈。代理的目标是找到一个策略,即一个从状态到动作的映射,以最大化长期奖励。
# 2. Q-learning算法的理论基础
### 2.1 马尔可夫决策过程(MDP)
马尔可夫决策过程(MDP)是一个数学框架,用于建模强化学习环境。它由以下元素组成:
- **状态空间(S):**环境中可能的状态集合。
- **动作空间(A):**每个状态下可用的动作集合。
- **转移概率(P):**从状态s执行动作a转移到状态s'的概率。
- **奖励函数(R):**执行动作a后从状态s转移到状态s'获得的奖励。
- **折扣因子(γ):**未来奖励的衰减因子。
MDP可以表示为一个四元组(S, A, P, R, γ)。
### 2.2 Q-learning算法的数学原理
Q-learning算法是一种无模型强化学习算法,它通过估计每个状态-动作对的价值函数Q(s, a)来学习最优策略。Q(s, a)表示从状态s执行动作a开始,在未来执行最优策略所能获得的奖励的期望值。
Q-learning算法的更新公式如下:
```python
Q(s, a) = Q(s, a) + α * (R(s, a) + γ * max_a' Q(s', a') - Q(s, a))
```
其中:
- α是学习率,控制更新的幅度。
- R(s, a)是执行动作a后从状态s转移到状态s'获得的奖励。
- γ是折扣因子,控制未来奖励的衰减。
- max_a' Q(s', a')是状态s'下所有可能动作的价值函数的最大值。
Q-learning算法通过不断迭代更新Q(s, a)值,最终收敛到最优价值函数,从而确定最优策略。
# 3.1 Q-learning算法的Python实现
Q-learning算法的Python实现相对简单,下面是一个简化的示例代码:
```python
import numpy as np
class QLearningAgent:
def __init__(self, environment, learning_rate=0.1, discount_factor=0.9):
self.environment = environment
self.learning_rate = learning_rate
self.discount_factor = discount_factor
# 初始化Q表
self.q_table = np.zeros((environment.num_states, environment.num_actions))
def choose_action(self, state):
# 根据Q表选择动作
actions = self.environment.get_actions(state)
action = np.argmax(self.q_table[state, actions])
return action
def update_q_table(self, state, action, reward, next_state):
# 更新Q表
target = reward + self.discount_factor * np.max(self.q_table[next_state, :])
self.q_table[state, action] += self.learning_rate * (target - self.q_table[state, action])
```
**代码逻辑逐行解读:**
1. `__init__`方法初始化Q-learning代理,包括环境、学习率和折扣因子。
2. `choose_action`方法根据Q表选择动作。
3. `update_q_table`方法根据贝尔曼方程更新Q表。
**参数说明:**
* `environment`:环境对象。
* `learning_rate`:学习率,控制Q表更新的幅度。
* `discount_factor`:折扣因子,控制未来奖励的权重。
### 3.2 Q-learning算法在迷宫环境中的应用
为了演示Q-learning算法,我们使用一个简单的迷宫环境。迷宫是一个网格世界,其中代理可以移动到相邻的单元格。目标是找到从起点到终点的最短路径。
**

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 Python 机器学习合集,这是一个涵盖机器学习基础知识的全面指南。本专栏从 Python 基础语法开始,包括数据类型、变量、控制流语句、函数和模块。
接下来,深入了解 NumPy,一个用于数组操作和运算的强大库。您将学习如何创建和操作数组,以及使用各种常用函数。通过这些基础知识,您将为探索更高级的机器学习概念做好准备,例如数据预处理、模型训练和评估。
本专栏适合初学者和希望提升 Python 和机器学习技能的任何人。通过循序渐进的教程和清晰易懂的解释,您将获得在机器学习领域取得成功的必要基础。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【PHPWord:自动化交叉引用与目录】:一键生成文档结构

# 摘要
本文详细介绍了PHPWord库在处理Word文档时的基础和高级功能,覆盖了从基础文档结构的概念到自动化文档功能的实现。文章首先阐述了PHPWord的基本使用,包括文档元素的创建与管理,如标题、段落、图片、表格、列表和脚注。随后,深入讨论了自动化交叉引用与目录生成的方法,以及如何在实际项目中运用P
伺服电机调试艺术:三菱MR-JE-A调整技巧全攻略

# 摘要
伺服电机在现代自动化和机器人技术中发挥着核心作用,其性能和稳定性对于整个系统的运行至关重要。本文从伺服电机的基础知识和调试概述开始,详细介绍了三菱MR-JE-A伺服驱动器的安装步骤、
深入STM32 PWM控制:5大策略教你高效实现波形调整
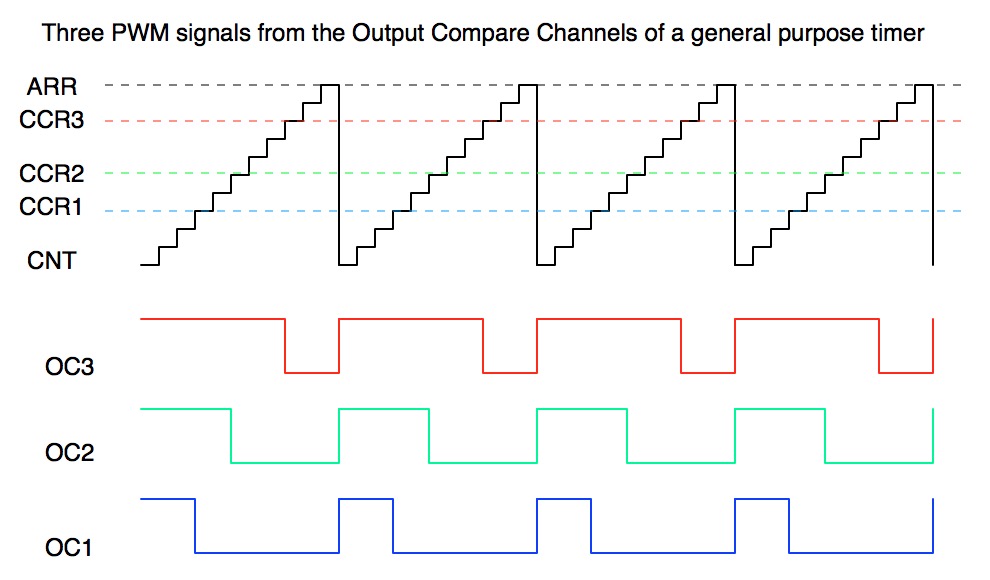
# 摘要
PWM(脉冲宽度调制)控制技术是微控制器应用中一种重要的信号处理方法,尤其在STM32微控制器上得到了广泛应用。本文首先概述了PWM控制的基本概念,介绍了PWM的工作原理、关键参数以及与微控制器的交互方式。接着,本文深入探讨了PWM波形调整的实践技巧,包括硬件定时器配置、软件算法应用,以及调试与优化的策略。文章进一步阐述了PWM控制在进阶应用中的表现,如多通道同步输出
版本控制基础深度解析:项目文档管理演进全攻略
# 摘要
版本控制作为软件开发过程中的核心组成部分,确保了代码的有序管理与团队协作的高效性。本文首先概述了版本控制的重要性,并对其理论基础进行了详细解析,包括核心概念的定义、基本术语、分类选择以及工作流程。随后,文章提供了针对Git、SVN和Mercurial等不同版本控制系统的基础操作指南,进一步深入到高级技巧与应用,如分支管理策
【Flac3D命令进阶技巧】:工作效率提升的7大秘诀,专家级工作流
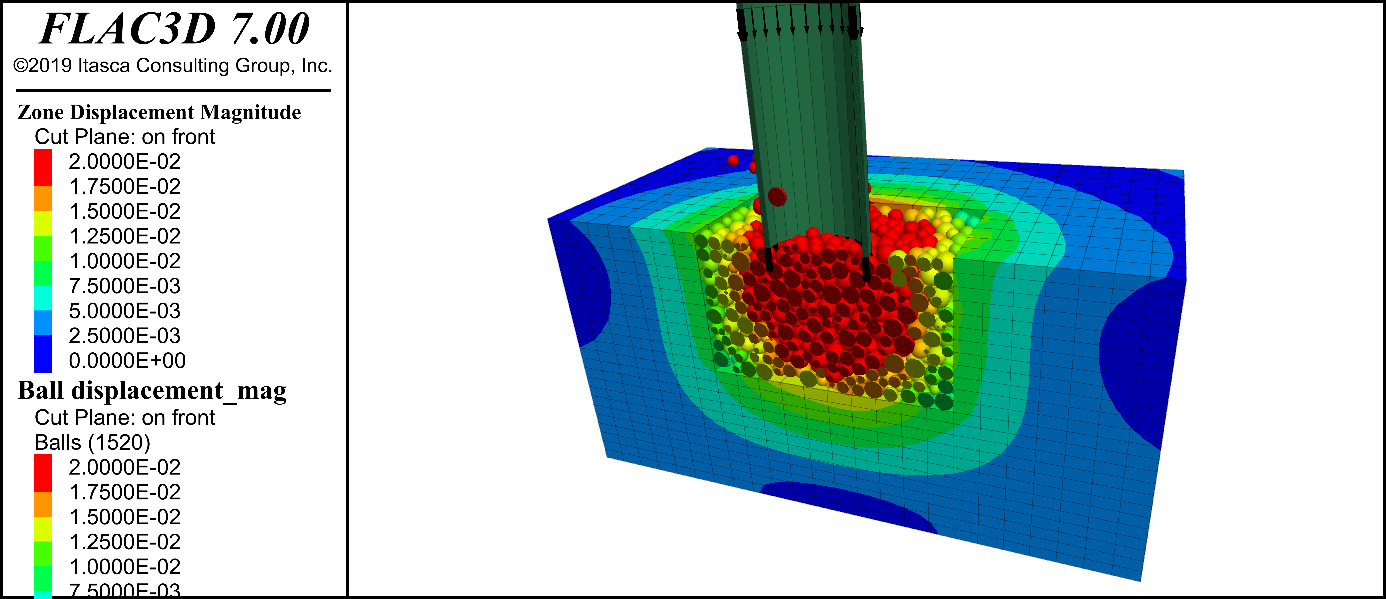
# 摘要
本文详细探讨了Flac3D命令的高级功能及其在工程建模与分析中的应用。首先,文章介绍了Flac3D命令的基本与高级参数设置,强调了参数定义、使用和效果,以及调试和性能优化的重要性。其次,文章阐述了通过Flac3D命令建立和分析模型的过程,包括模型的建立、修改、分析和优化方法,特别是对于复杂模型的应用。第三部分深入探讨了Flac3D命令的脚本编程、自定义功能和集成应用,以及这些高级应用如何提高工作效率和分析准确性。最后,文章研究了Flac3D命令
【WPS与Office转换PDF实战】:全面提升转换效率及解决常见问题

# 摘要
本文综述了PDF转换技术及其应用实践,涵盖从WPS和Office软件内直接转换到使用第三方工具和自动化脚本的多种方法。文章不仅介绍了基本的转换原理和操作流程,还探讨了批量转换和高级功能的实现,同时关注转换
犯罪地图分析:ArcGIS核密度分析的进阶教程与实践案例
# 摘要
犯罪地图分析是利用地理信息系统(GIS)技术对犯罪数据进行空间分析和可视化的重要方法,它有助于执法机构更有效地理解犯罪模式和分布。本文首先介绍了犯罪地图分析的理论基础及其重要性,然后深入探讨了ArcGIS中的核密度分析技术,包括核密度估计的理论框架、工具操作以及高级设置。随后,文章通过实践应用,展现了如何准备数据、进行核密度分析并应用于实际案例研究中。在此基础上,进一
【Tetgen实用技巧】:提升你的网格生成效率,精通复杂模型处理

# 摘要
Tetgen是一款功能强大的网格生成软件,广泛应用于各类工程和科研领域。本文首先介绍了Tetgen的基本概念、安装配置方法,进而解析了其核心概念,包括网格生成的基础理论、输入输出格式、主要功能模块等。随后,文章提供了提升Tetgen网格生成效率的实用技巧,以及处理复杂模型的策略和高级功能应用。此外,本文还探讨了Tetgen在有限元分析、计算
【MOSFET开关特性】:Fairchild技术如何通过节点分布律优化性能
# 摘要
本文深入探讨了MOSFET开关特性的基础理论及其在Fairchild技术中的应用,重点分析了节点分布律在优化MOSFET性能中的作用,包括理论基础和实现方法。通过对比Fairchild技术下的性能数据和实际应用案例研究,本文揭示了节点分布律如何有效提升MOSFET的开关速度与降低功耗。最后,本文展望了MOS
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )