【Optimization Algorithms】: Tips for Enhancing GAN Stability: Creating More Robust Generative Models
发布时间: 2024-09-15 16:56:48 阅读量: 26 订阅数: 26 
# 1. Introduction to Generative Adversarial Networks (GANs)
Generative Adversarial Networks (GANs), a groundbreaking technology in the field of deep learning, have achieved significant results in various areas, including image generation, text-to-image translation, data augmentation, and unsupervised learning. GAN consists of two key components: the Generator and the Discriminator. The Generator aims to produce data that is indistinguishable from real data, while the Discriminator's task is to differentiate between the fake data generated by the Generator and the real data. Ideally, when the GAN is trained well enough, the Generator can produce fake data that is indistinguishable from real data, and the Discriminator cannot tell the difference. This adversarial process drives the continuous improvement of the model. Understanding the basics of GANs is not only a prerequisite for in-depth study of its advanced features but also the key to solving stability issues and applying GAN technology in practice. The following chapters will provide detailed introductions to the internal structure of GANs, the challenges in the training process, and how to optimize these challenges.
# 2. Understanding Stability Issues in GANs
### 2.1 Basic Structure and Principles of GANs
#### 2.1.1 Roles of the Generator and Discriminator
Generative Adversarial Networks (GANs) consist of two main components: the Generator and the Discriminator. The Generator's task is to create fake data that is as close as possible to real data based on random noise. Meanwhile, the Discriminator's goal is to distinguish the data it receives as real or fake data generated by the Generator. This process can be compared to a game of cat and mouse between a police officer and a counterfeiter. The Generator becomes more adept at creating fake data, while the Discriminator becomes more skilled at telling the difference. When the performance of both reaches a balance, the quality of the data produced by the Generator is theoretically indistinguishable from real data.
#### 2.1.2 Loss Functions and Optimization Objectives
The training goal of GANs is to improve the performance of both the Generator and the Discriminator through the adversarial process. The Generator's loss function is typically the probability of the Discriminator making an incorrect judgment on the fake data, while the Discriminator's loss function is the negative log likelihood of its incorrect judgment on the data being real or fake. The training process involves minimizing these two loss functions through gradient descent. However, in practice, because the two loss functions are interdependent, this optimization process can easily become unstable, leading to issues such as mode collapse or training oscillation.
### 2.2 Common Problems in GAN Training
#### 2.2.1 Mode Collapse
Mode collapse is a common stability issue encountered during GAN training. It occurs when the Generator learns a few data patterns and continuously reproduces them, ignoring the existence of other patterns. This usually happens when a particular pattern is highly effective in the Discriminator's view, causing the Generator to over-rely on it. In such cases, although the Discriminator may be easily fooled, the diversity of the generated data is significantly reduced.
#### 2.2.2 Training Instability and Oscillation
Training instability and oscillation are characterized by the values of the model's loss functions fluctuating during the training process and not being able to settle at a lower level. This is usually related to incorrect choices of learning rates, gradient vanishing, or gradient explosion. Oscillation means that the GAN is constantly switching between multiple modes without converging to a stable state. The result is usually that the Generator cannot effectively learn the data distribution, and the quality of the generated data is poor.
#### 2.2.3 Gradient Vanishing and Explosion
Gradient vanishing and explosion are common problems when training deep neural networks, and GANs are no exception. When the gradient values become very small or very large, the weight updates for the Generator and Discriminator may become extremely slow (vanishing) or unstable (explosion). Gradient vanishing can cause the training to stagnate, while gradient explosion can cause model parameters to diverge to extreme values, making the model untrainable. To alleviate these issues, strategies such as gradient clipping, using more stable optimizers, and so on have been proposed and applied.
### 2.3 Stability Optimization Techniques in GANs
#### 2.3.1 Improved Gradient Update Strategies
One method to optimize the stability of GAN training is to introduce improved gradient update strategies. For example, adding momentum terms to accelerate the gradient descent process or using adaptive learning rate optimization algorithms like RMSprop and Adam to maintain training stability. In addition, some studies attempt to directly introduce constraints into the gradient update rules to prevent gradient vanishing or explosion problems.
#### 2.3.2 Data Augmentation and Regularization
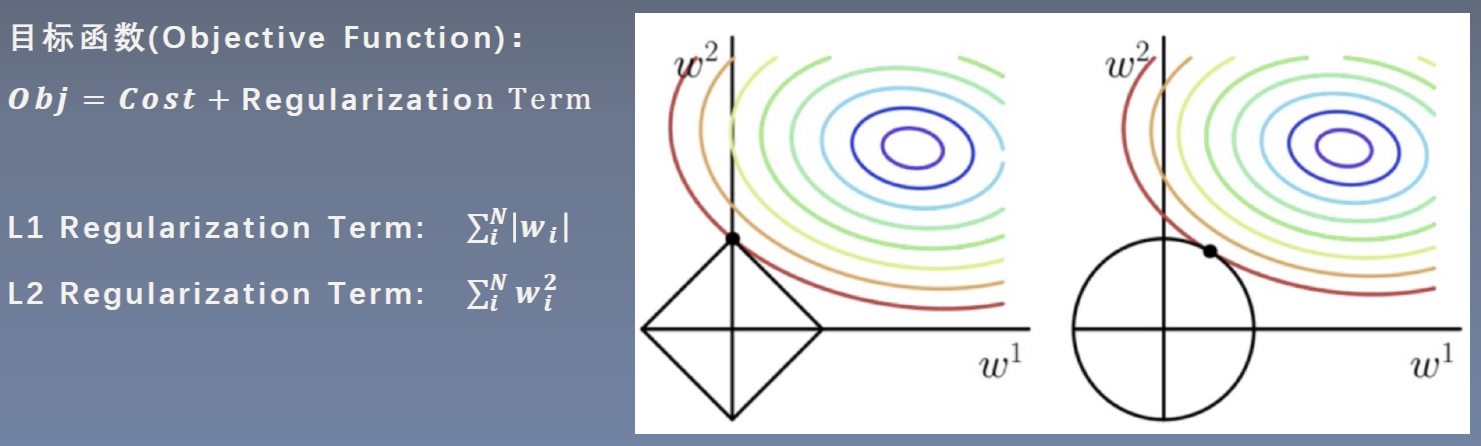
Data augmentation techniques, widely used in other areas of deep learning, can also be applied to improve the stability of GAN training. By applying geometric and color transformations to the training data, the diversity of the training set can be increased, helping the Generator learn richer data patterns and reduce mode collapse. At the same time, adding regularization terms (such as L1/L2 regularization) can constrain the complexity of the model, prevent overfitting, and thus increase training stability.
```python
# Example code: Data augmentation example
from keras.preprocessing.image import ImageDataGenerator
# Create an ImageDataGenerator instance and configure data augmentation parameters
datagen = ImageDataGenerator(
rotation_range=30, # Randomly rotate images up to 30 degrees
width_shift_range=0.2, # Randomly shift images horizontally up to 20%
height_shift_range=0.2, # Randomly shift images vertically up to 20%
shear_range=0.2, # Randomly apply shearing transformations
zoom_range=0.2, # Randomly zoom in and out on images
horizontal_flip=True, # Randomly flip images horizontally
fill_mode='nearest' # Method to fill newly created pixels
)
# Use ImageDataGenerator for data augmentation
# Here we assume we have a DataFrame named train_data containing paths and labels for training images
# Assume train_generator is a custom generator function that generates augmented data based on train_data
datagen.flow_from_dataframe(
train_data, # DataFrame object
directory="path/to/train/directory", # Path to image directory
x_col='path', # Column name in DataFrame with image paths
y_col='label', # Column name in DataFrame with image labels
class_mode='binary', # Data class mode, binary
target_size=(150, 150), # Resize images
batch_size=32
)
```
In the above code, we configure a series of data augmentation parameters through the `ImageDataGenerator` class, such as rotation, translation, shearing, zooming, horizontal flipping, etc., and use the `flow_from_dataframe` method to generate augmented training data based on actual image paths and labels, enhancing the diversity of the training dataset.
# 3. GAN Stability Enhancement Strategies
## 3.1 Pattern Regularization Methods
### 3.1.1 Noise Injection
Noise injection is a technique used during GAN training to improve model stability. Injecting noise into the Generator's input can prevent the model from over-optimizing to specific samples, thus avoiding mode collapse. The noise can be random noise or Gaussian noise, depending on the specific task requirements. The amount of noise usually needs to be determined through experiments to balance between preventing mode collapse and maintaining the quality of generated samples.
Code examples and logical analysis:
```python
# Assume the model's input is Gaussian noise
import numpy as np
def generate_noise(batch_size, input_dim):
return np.random.normal(0, 1, (batch_size, input_dim))
# Inject noise into the Generator's forward propagation
def generator_forward(input_noise, generator_model):
# generator_model is the defined Generator model
generated_data = generator_model(input_noise)
return generated_data
# Assume we have a batch size of 64 and an input dimension of 100
batch_size = 64
input_dim = 100
noise = generate_noise(batch_size, input_dim)
# This is a simplified example of the Generator's forward propagation
generated_data = generator_forward(noise, generator_model)
```
In the above code, we first define a function `generate_noise` to generate noise, and then in the `generator_forward` function, we pass the noise as input to the Generator model. In practice, noise should be added to each layer or selectively added to certain layers.
Noise injection is a simple and effective technique, but controlling the amount of noise is key. If too much noise is added, it may lead to a decrease in the quality of the generated data; if too little, it may not effectively prevent mode collapse. Generally, experiments are needed to find a compromise solution.
### 3.1.2 Batch Normalization
Batch Normalization is another technique to improve model stability. It normalizes the input of each batch to address the problem of internal covariate shift, making the model less sensitive to the choice of learning rate and helping to alleviate mode collapse. Batch Normalization stabilizes the feature distribution by normalizing the mean and variance of each feature.
Code examples and logical analysis:
```python
from keras.layers import BatchNormalization
# Assuming this is a fully connected layer, we add Batch Normalization after this layer
from keras.layers import Dense
def batch_normalization_layer(input_tensor, num_units):
layer = Dense(num_units, activation=None)(input_tensor) # Linear fully connected layer
layer = BatchNormalization()(layer) # Batch Normalization layer
return layer
# Example of using a Batch Normalization layer
from keras.models import Model
from keras.layers import Input
input_tensor = Input(shape=(input_dim,))
output_tensor = batch_normalization_layer(input_tensor, num_units=100)
model = Model(inputs=input_tensor, outputs=output_tensor)
```
In the above code, we first create a fully connected layer, and then apply Batch Normalization after this layer. Thus, each time the network weights are updated, the input to this layer is normalized to ensure that its mean is close to 0 and its variance is close to 1. Batch Normalization can help the model converge faster, and when training GANs, it is usually placed in the hidden layers of the Generator.
Although Batch Normalization has many advantages, it can also cause some problems, such as gradient vanishing or gradient explosion. When using Batch Normalization, other techniques are usually used in combination, such as weight initialization strategies or learning rate adjustments, to achieve better training results.
## 3.2 Improvements in Loss Functions
### 3.2.1 Wasserstein Distance (WGAN)
The Wasserstein distance, also known as the Earth Mover's Distance (EMD), is proposed as a loss function in GANs to address the issues of training instability and mode c

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
数据清洗的概率分布理解:数据背后的分布特性

# 1. 数据清洗的概述和重要性
数据清洗是数据预处理的一个关键环节,它直接关系到数据分析和挖掘的准确性和有效性。在大数据时代,数据清洗的地位尤为重要,因为数据量巨大且复杂性高,清洗过程的优劣可以显著影响最终结果的质量。
## 1.1 数据清洗的目的
数据清洗
Pandas数据转换:重塑、融合与数据转换技巧秘籍
# 1. Pandas数据转换基础
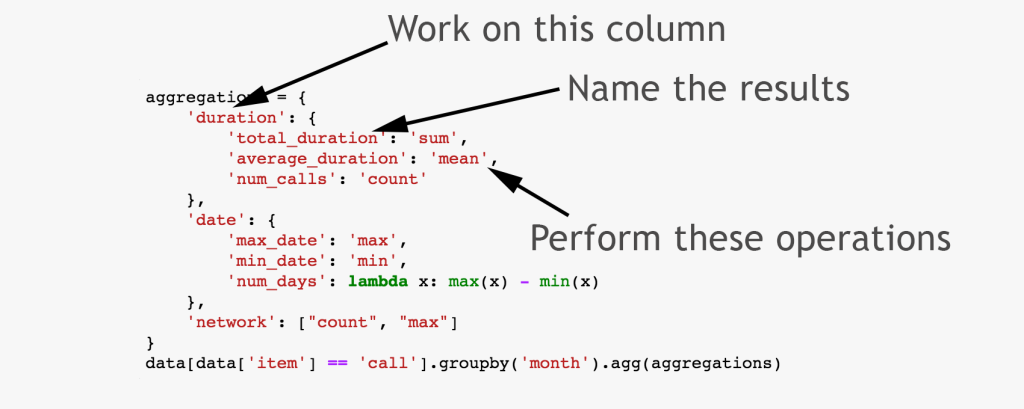
在这一章节中,我们将介绍Pandas库中数据转换的基础知识,为读者搭建理解后续章节内容的基础。首先,我们将快速回顾Pandas库的重要性以及它在数据分析中的核心地位。接下来,我们将探讨数据转换的基本概念,包括数据的筛选、清洗、聚合等操作。然后,逐步深入到不同数据转换场景,对每种操作的实际意义进行详细解读,以及它们如何影响数
正态分布与信号处理:噪声模型的正态分布应用解析
# 1. 正态分布的基础理论
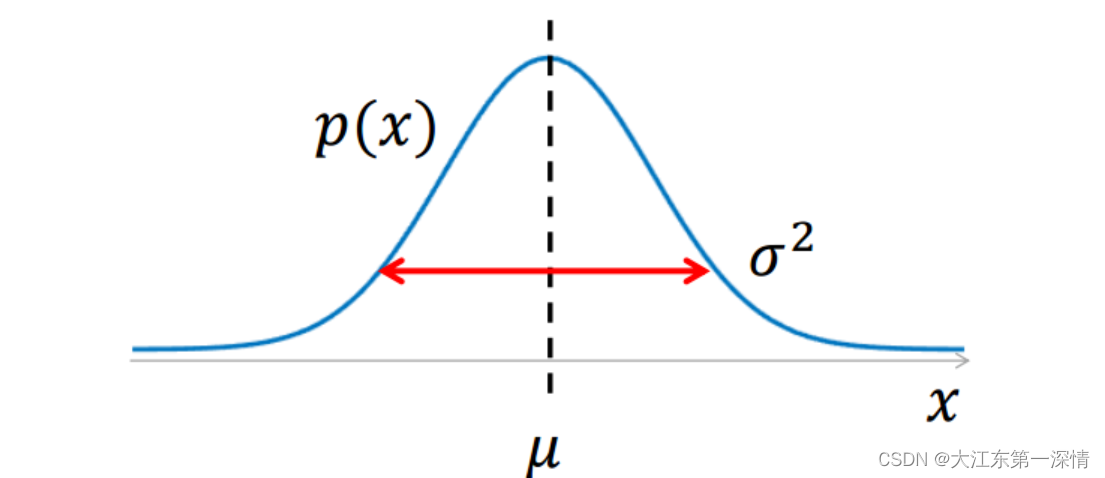
正态分布,又称为高斯分布,是一种在自然界和社会科学中广泛存在的统计分布。其因数学表达形式简洁且具有重要的统计意义而广受关注。本章节我们将从以下几个方面对正态分布的基础理论进行探讨。
## 正态分布的数学定义
正态分布可以用参数均值(μ)和标准差(σ)完全描述,其概率密度函数(PDF)表达式为:
```math
f(x|\mu,\sigma^2) = \frac{1}{\sqrt{2\pi\sigma^2}} e
【线性回归变种对比】:岭回归与套索回归的深入分析及选择指南
# 1. 线性回归基础概述
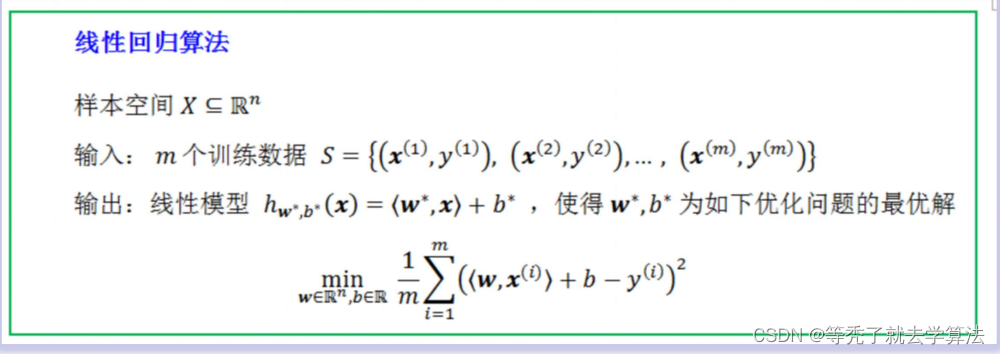
线性回归是最基础且广泛使用的统计和机器学习技术之一。它旨在通过建立一个线性模型来研究两个或多个变量间的关系。本章将简要介绍线性回归的核心概念,为读者理解更高级的回归技术打下坚实基础。
## 1.1 线性回归的基本原理
线性回归模型试图找到一条直线,这条直线能够最好地描述数据集中各个样本点。通常,我们会有一个因变量(或称为响应变量)和一个或多个自变量(或称为解释变量)
从Python脚本到交互式图表:Matplotlib的应用案例,让数据生动起来

# 1. Matplotlib的安装与基础配置
在这一章中,我们将首先讨论如何安装Matplotlib,这是一个广泛使用的Python绘图库,它是数据可视化项目中的一个核心工具。我们将介绍适用于各种操作系统的安装方法,并确保读者可以无痛地开始使用Matplotlib
【数据集加载与分析】:Scikit-learn内置数据集探索指南

# 1. Scikit-learn数据集简介
数据科学的核心是数据,而高效地处理和分析数据离不开合适的工具和数据集。Scikit-learn,一个广泛应用于Python语言的开源机器学习库,不仅提供了一整套机器学习算法,还内置了多种数据集,为数据科学家进行数据探索和模型验证提供了极大的便利。本章将首先介绍Scikit-learn数据集的基础知识,包括它的起源、
【品牌化的可视化效果】:Seaborn样式管理的艺术

# 1. Seaborn概述与数据可视化基础
## 1.1 Seaborn的诞生与重要性
Seaborn是一个基于Python的统计绘图库,它提供了一个高级接口来绘制吸引人的和信息丰富的统计图形。与Matplotlib等绘图库相比,Seaborn在很多方面提供了更为简洁的API,尤其是在绘制具有多个变量的图表时,通过引入额外的主题和调色板功能,大大简化了绘图的过程。Seaborn在数据科学领域得
NumPy在金融数据分析中的应用:风险模型与预测技术的6大秘籍

# 1. NumPy基础与金融数据处理
金融数据处理是金融分析的核心,而NumPy作为一个强大的科学计算库,在金融数据处理中扮演着不可或缺的角色。本章首先介绍NumPy的基础知识,然后探讨其在金融数据处理中的应用。
## 1.1 NumPy基础
NumPy(N
PyTorch超参数调优:专家的5步调优指南
# 1. PyTorch超参数调优基础概念
## 1.1 什么是超参数?
在深度学习中,超参数是模型训练前需要设定的参数,它们控制学习过程并影响模型的性能。与模型参数(如权重和偏置)不同,超参数不会在训练过程中自动更新,而是需要我们根据经验或者通过调优来确定它们的最优值。
## 1.2 为什么要进行超参数调优?
超参数的选择直接影响模型的学习效率和最终的性能。在没有经过优化的默认值下训练模型可能会导致以下问题:
- **过拟合**:模型在
Keras注意力机制:构建理解复杂数据的强大模型
# 1. 注意力机制在深度学习中的作用
## 1.1 理解深度学习中的注意力
深度学习通过模仿人脑的信息处理机制,已经取得了巨大的成功。然而,传统深度学习模型在处理长序列数据时常常遇到挑战,如长距离依赖问题和计算资源消耗。注意力机制的提出为解决这些问题提供了一种创新的方法。通过模仿人类的注意力集中过程,这种机制允许模型在处理信息时,更加聚焦于相关数据,从而提高学习效率和准确性。
## 1.2
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )