【进阶】强化学习中的奖励工程设计
发布时间: 2024-06-27 02:36:13 阅读量: 107 订阅数: 146 

面向持续集成测试优化的强化学习奖励机制1
# 1. **2.1 强化学习的数学模型**
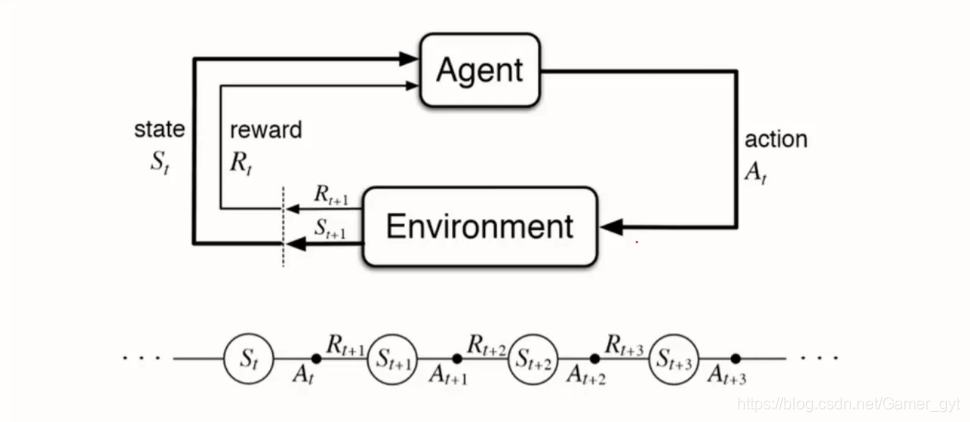
强化学习的数学模型建立在马尔可夫决策过程 (MDP) 的基础上。MDP 是一个四元组 (S, A, P, R),其中:
* S 是状态空间,表示环境中可能的全部状态。
* A 是动作空间,表示在每个状态下可以采取的全部动作。
* P 是状态转移概率,表示在执行动作 a 后从状态 s 转移到状态 s' 的概率。
* R 是奖励函数,表示在执行动作 a 后获得的奖励。
**2.1.1 马尔可夫决策过程**
MDP 是一个无记忆过程,这意味着当前状态只取决于上一个状态和执行的动作,而与之前的历史无关。因此,MDP 可以用一个状态转移概率矩阵 P(s'|s, a) 和一个奖励函数 R(s, a) 来表示。
**2.1.2 价值函数和Q函数**
在强化学习中,价值函数 V(s) 表示从状态 s 开始采取最优策略所能获得的期望总奖励。Q函数 Q(s, a) 表示从状态 s 开始采取动作 a,然后采取最优策略所能获得的期望总奖励。
# 2. 奖励工程的理论基础
### 2.1 强化学习的数学模型
#### 2.1.1 马尔可夫决策过程
马尔可夫决策过程 (MDP) 是强化学习中广泛使用的数学模型,它描述了智能体与环境之间的交互过程。MDP 由以下元素组成:
* **状态空间 (S)**:智能体可能处于的所有状态的集合。
* **动作空间 (A)**:智能体在每个状态下可以采取的所有动作的集合。
* **转移概率 (P)**:给定当前状态和动作,智能体转移到下一个状态的概率分布。
* **奖励函数 (R)**:智能体在每个状态下采取特定动作后获得的奖励。
* **折扣因子 (γ)**:表示未来奖励的折现率,范围为 [0, 1]。
#### 2.1.2 价值函数和Q函数
价值函数 (V) 和 Q 函数 (Q) 是衡量智能体行为的两个重要函数:
* **价值函数 (V)**:给定当前状态,智能体采取最佳策略所能获得的未来奖励的期望值。
* **Q 函数 (Q)**:给定当前状态和动作,智能体采取最佳策略所能获得的未来奖励的期望值。
价值函数和 Q 函数的计算公式如下:
```
V(s) = max_a Q(s, a)
Q(s, a) = E[R(s, a) + γV(s')]
```
其中:
* `s` 是当前状态
* `a` 是当前动作
* `s'` 是下一个状态
* `R(s, a)` 是在状态 `s` 采取动作 `a` 后获得的奖励
* `γ` 是折扣因子
### 2.2 奖励工程的原则和方法
奖励工程是设计奖励函数以引导智能体学习期望行为的过程。以下是一些奖励工程的原则和方法:
#### 2.2.1 稀疏奖励的处理
在许多强化学习任务中,奖励是稀疏的,即智能体只有在完成特定目标时才会获得奖励。为了解决这个问题,可以采用以下方法:
* **塑造奖励**:将任务分解为一系列子目标,并在完成每个子目标时提供奖励。
* **内在奖励**:在智能体采取有利于学习的行为时提供奖励,即使这些行为不会直接导致外部奖励。
#### 2.2.2 延迟奖励的折扣
延迟奖励是指智能体在未来才能获得的奖励。为了平衡即时奖励和延迟奖励,需要使用折扣因子 `γ`。折扣因子将未来的奖励折现,使其价值随着时间推移而降低。
#### 2.2.3 内在奖励的设置
内在奖励是智能体在采取探索性或好奇心驱动的行为时获得的奖励。内在奖励可以帮助智能体学习环境并发现新的策略。
# 3.1 游戏环境中的奖励设计
#### 3.1.1 奖励函数的制定
在游戏环境中,奖励函数是至关重要的,因为它决定了代理的行为和学习目标。设计一个有效的奖励函数需要考虑以下因素:
* **目标明确:**奖励函数应该明确定义代理的目标,并引导代理采取实现目标的行动。
* **稀疏性:**在许多游戏中,奖励是稀疏的,即代理只有在完成特定任务或达到特定状态时才会收到奖励。稀疏的奖励会给强化学习算法带来挑战,因此需要仔细设计奖励函数以提供足够的反馈。
* **延迟性:**在某些游戏中,奖励可能会延迟,即代理需要采取一系列行动才能获得奖励。延迟的奖励会使强

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏汇集了有关 Python 强化学习的全面文章,涵盖了从基础概念到高级技术的各个方面。专栏标题为“Python 强化学习合集”,旨在为读者提供一个一站式平台,深入了解强化学习的原理和应用。
专栏内容包括:
- 强化学习的基础知识,包括其定义、与其他机器学习方法的区别以及应用领域。
- 强化学习的核心组件,如智能体、环境、状态、奖励和价值函数。
- 奖励设计和价值函数计算等强化学习的关键技术。
通过阅读本专栏,读者将对 Python 强化学习的各个方面获得深入的理解,并能够将这些技术应用于各种实际问题中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
CTS模型:从基础到高级,构建地表模拟的全过程详解
# 摘要
本文对CTS模型进行了全面介绍,从基础理论到实践操作再到高级应用进行了深入探讨。CTS模型作为一种重要的地表模拟工具,在地理信息系统(GIS)中有着广泛的应用。本文详细阐述了CTS模型的定义、组成、数学基础和关键算法,并对模型的建立、参数设定、迭代和收敛性分析等实践操作进行了具体说明。通过对实地调查数据和遥感数据的收集与处理,本文展示了模型在构建地表模拟时的步
【升级前必看】:Python 3.9.20的兼容性检查清单
# 摘要
Python 3.9.20版本的发布带来了多方面的更新,包括语法和标准库的改动以及对第三方库兼容性的挑战。本文旨在概述Python 3.9.20的版本特点,深入探讨其与既有代码的兼容性问题,并提供相应的测试策略和案例分析。文章还关注在兼容性升级过程中如何处理不兼容问题,并给出升级后的注意事项。最后,
【Phoenix WinNonlin数据可视化】:结果展示的最佳实践和技巧

# 摘要
本文旨在全面介绍Phoenix WinNonlin软件在数据可视化方面的应用,概念与界面功能概览,以及数据可视化技术的深入探讨。通过章节内容对软件界面的核心组件、功能操作流程进行解析,强调了数据图表化和高级数据处理技巧的重要性。实践案例分析
【Allegro脚本编程:自动化设计的终极指南】
# 摘要
Allegro脚本作为一种强大的自动化工具,广泛应用于电子设计自动化领域。本文从脚本的基础知识讲起,深入探讨了其语法、高级特性以及在实践中的具体应用,包括自动化流程设计、数据管理、交互式脚本编写。随后,文章详细介绍了脚本优化与调试技巧,以提升执行效率和故障处理能力。最后,文章探索了Allegro脚本在PCB设计自动化、IC封装设计等不同领域的
AnyLogic工作流与决策模拟:精通业务流程设计只需72小时
# 摘要
本文全面概述了业务流程模拟与决策分析的理论与实践,特别聚焦于AnyLogic软件的应用。首先,对AnyLogic的基础知识和界面布局进行了介绍,并探讨了创建新模拟项目的步骤。接着,文章深入探讨了业务流程模拟的理论基础和建模技术,以及如何通过流程图和模拟分析来支持决策。此外,还详细讲解了面向对象模拟方法在AnyLogic中的实现,构建高级决策模型的技巧,以及仿真实验的设计与结果分析。最后,文章探讨了AnyLogi
【网络性能调优实战】:ifconfig在加速Linux网络中的10大应用
# 摘要
本文全面介绍了网络性能调优的基础知识,并着重探讨了Linux系统中广泛使用的网络配置工具ifconfig在性能加速和优化配置中的关键应用。通过对网络接口参数的优化、流量控制与速率调整以及网络故障的诊断与监控,本文提供了一系列实用的ifconfig应用技巧。进一步,本文讨论了ifconfig的高级应用,包括虚拟网络接口配置、多网络环境性能优化和安全性能提升。最后,本文比较了i
CMW500-LTE自动化测试脚本编写:从零基础到实战,提升测试效率

# 摘要
随着移动通信技术的快速发展,CMW500-LTE作为一款先进的测试设备,在无线通信领域占据重要地位。本文系统性地介绍了CMW500-LTE的自动化测试方法,涵盖了测试概述、基础理论、实践操作、性能优化、实战案例以及未来展望。通过对CMW500-LTE设备和接口的介绍,自动化测试环境的搭建,测试脚本编写理论与实践的深入
S4 ABAP编程数据处理

# 摘要
本文对S4 ABAP编程进行了全面的介绍和分析,从基础的数据定义与类型到数据操作与处理,再到数据集成与分析,以及实际应用和性能调优。特别指出S4 ABAP在供应链管理和财务流程中数据处理的重要性,并提供了性能瓶颈诊断和错误处理的策略。文章还探讨了面向对象编程在ABAP中的应用和S4 ABAP的未来创新技术趋势,强调了HANA数据库和云平台对AB
【BK2433高级定时器应用宝典】:定时器配置与应用手到擒来

# 摘要
定时器技术是嵌入式系统和实时操作系统中的核心组件,本文首先介绍了定时器的基础配置和高级配置策略,包括精确度设置、中断管理以及节能模式的实现。随后,文中详细探讨了定时器在嵌入式系统中的应用场景,如实时操作系统中的多任务调度集成
Eclipse MS5145扫码枪维护必修课:预防常见问题
# 摘要
Eclipse MS5145扫码枪作为一款广泛使用的条码读取设备,在日常使用和维护中需要特别关注其性能和可靠性。本文系统地概述了Eclipse MS5145扫码枪的维护基础,并深入探讨了其硬件组成部分及其工作原理,包括传感器、光源、解码引擎,以及条码扫描和数据传输机制。同时,本文详细介绍了日常维护流程、故障诊断与预防措施,以及如何实施高级维护技术如性能测试
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )