【基础】价值迭代(Value Iteration)算法详解
发布时间: 2024-06-27 00:05:21 阅读量: 128 订阅数: 123 
# 1. 价值迭代算法概述**
价值迭代算法是一种用于解决马尔可夫决策过程(MDP)的动态规划算法。它通过迭代更新价值函数来找到MDP的最佳策略,该策略最大化从当前状态开始的长期奖励。价值迭代算法广泛应用于强化学习、运筹学和经济学等领域。
# 2. 价值迭代算法的理论基础
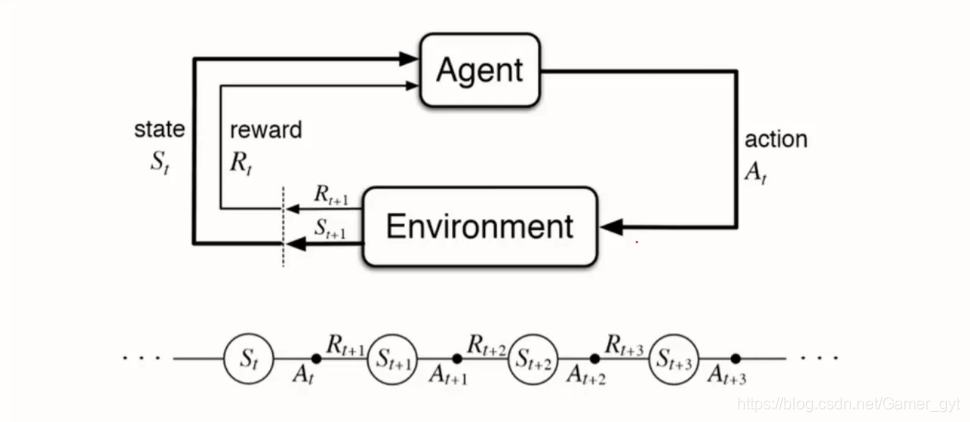
### 2.1 马尔可夫决策过程(MDP)
马尔可夫决策过程(MDP)是一种用于建模顺序决策问题的数学框架。它由以下元素组成:
- **状态空间(S):**所有可能的状态集合。
- **动作空间(A):**在每个状态下可采取的所有动作集合。
- **转移概率(P):**从状态 s 执行动作 a 转移到状态 s' 的概率。
- **奖励函数(R):**在状态 s 执行动作 a 后获得的立即奖励。
- **折扣因子(γ):**未来奖励的衰减因子(0 ≤ γ ≤ 1)。
### 2.2 贝尔曼方程
贝尔曼方程是价值迭代算法的核心方程。它定义了状态 s 在给定策略 π 下的价值函数 Vπ(s):
```
Vπ(s) = max_a [R(s, a) + γ Σ_{s' ∈ S} P(s' | s, a) Vπ(s')]
```
其中:
- `max_a` 表示对所有可能的动作 a 求最大值。
- `R(s, a)` 是在状态 s 执行动作 a 后获得的立即奖励。
- `γ` 是折扣因子。
- `P(s' | s, a)` 是从状态 s 执行动作 a 转移到状态 s' 的概率。
- `Vπ(s')` 是状态 s' 在给定策略 π 下的价值。
### 2.3 价值函数的收敛性
价值迭代算法通过迭代更新价值函数 V(s) 来求解贝尔曼方程。在每次迭代中,算法使用以下更新规则:
```
V^(k+1)(s) = max_a [R(s, a) + γ Σ_{s' ∈ S} P(s' | s, a) V^k(s')]
```
其中:
- `V^(k+1)(s)` 是第 k+1 次迭代后状态 s 的价值。
- `V^k(s')` 是第 k 次迭代后状态 s' 的价值。
当价值函数满足以下收敛条件时,算法停止迭代:
```
|V^(k+1)(s) - V^k(s)| < ε
```
其中:
- `ε` 是一个预定义的容差值。
**代码块:**
```python
def value_iteration(mdp, max_iterations=100, tolerance=1e-6):
"""
执行价值迭代算法。
参数:
mdp: 马尔可夫决策过程对象。
max_iterations: 最大迭代次数。
tolerance: 价值函数收敛的容差值。
返回:
价值函数 V(s) 的字典。
"""
V = {s: 0 for s in mdp.states} # 初始化价值函数
for _ in range(max_iterations):
delta = 0 # 记录价值函数的最大变化量
for s in mdp.states:
v_old = V[s]
V[s] = max_a(R(s, a) + γ * Σ_{s' ∈ S} P(s' | s, a) V[s'])
delta = max(delta, abs(V[s] - v_old))
if delta
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏汇集了有关 Python 强化学习的全面文章,涵盖了从基础概念到高级技术的各个方面。专栏标题为“Python 强化学习合集”,旨在为读者提供一个一站式平台,深入了解强化学习的原理和应用。
专栏内容包括:
- 强化学习的基础知识,包括其定义、与其他机器学习方法的区别以及应用领域。
- 强化学习的核心组件,如智能体、环境、状态、奖励和价值函数。
- 奖励设计和价值函数计算等强化学习的关键技术。
通过阅读本专栏,读者将对 Python 强化学习的各个方面获得深入的理解,并能够将这些技术应用于各种实际问题中。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
MATLAB噪声过滤技术:条形码识别的清晰之道
# 1. MATLAB噪声过滤技术概述
在现代计算机视觉与图像处理领域中,噪声过滤是基础且至关重要的一个环节。图像噪声可能来源于多种因素,如传感器缺陷、传输干扰、或环境光照不均等,这些都可能对图像质量产生负面影响。MATLAB,作为一种广泛使用的数值计算和可视化平台,提供了丰富的工具箱和函数来处理这些噪声问题。在本章中,我们将概述MATLAB中噪声过滤技术的重要性,以及它在数字图像处理中
JSTL响应式Web设计实战:适配各种设备的网页构建秘籍
# 1. 响应式Web设计的理论基础
响应式Web设计是创建能够适应多种设备屏幕尺寸和分辨率的网站的方法。这不仅提升了用户体验,也为网站拥有者节省了维护多个版本网站的成本。理论基础部分首先将介绍Web设计中常用的术语和概念,例如:像素密度、视口(Viewport)、流式布局和媒体查询。紧接着,本章将探讨响应式设计的三个基本组成部分:弹性网格、灵活的图片以及媒体查询。最后,本章会对如何构建一个响应式网页进行初步的概述,为后续章节使用JSTL进行实践
【MATLAB应用诊断与修复】:快速定位问题,轻松解决问题的终极工具
# 1. MATLAB的基本概念和使用环境
MATLAB,作为数学计算与仿真领域的一种高级语言,为用户提供了一个集数据分析、算法开发、绘图和数值计算等功能于一体的开发平台。本章将介绍MATLAB的基本概念、使用环境及其在工程应用中的地位。
## 1.1 MATLAB的起源与发展
MATLAB,全称为“Matrix Laboratory”,由美国MathWorks公司于1984年首次推出。它是一种面向科学和工程计算的高性能语言,支持矩阵运算、数据可视化、算法设计、用户界面构建等多方面任务。
## 1.2 MATLAB的安装与配置
安装MATLAB通常包括下载安装包、安装必要的工具箱以及环境
Standard.jar资源优化:压缩与性能提升的黄金法则

# 1. Standard.jar资源优化概述
在现代软件开发中,资源优化是提升应用性能和用户体验的重要手段之一。特别是在处理大型的Java应用程序包(如Standard.jar)时,合理的资源优化策略可以显著减少应用程序的启动时间、运行内存消耗,并增强其整体性能。本章旨在为读者提供一个关于Standard.jar资源优化的概览,并介绍后续章节中将详细讨论
【异步任务处理方案】:手机端众筹网站后台任务高效管理
# 1. 异步任务处理概念与重要性
在当今的软件开发中,异步任务处理已经成为一项关键的技术实践,它不仅影响着应用的性能和可扩展性,还直接关联到用户体验的优化。理解异步任务处理的基本概念和它的重要性,对于开发者来说是必不可少的。
## 1.1 异步任务处理的基本概念
异步任务处理是指在不阻塞主线程的情况下执行任务的能力。这意味着,当一个长时间运行的操作发生时,系统不会暂停响应用户输入,而是让程序在后台处理这些任务
Git协作宝典:代码版本控制在团队中的高效应用
# 1. Git版本控制基础
## Git的基本概念与安装配置
Git是目前最流行的版本控制系统,它的核心思想是记录快照而非差异变化。在理解如何使用Git之前,我们需要熟悉一些基本概念,如仓库(repository)、提交(commit)、分支(branch)和合并(merge)。Git可以通过安装包或者通过包管理器进行安装,例如在Ubuntu系统上可以使用`sudo apt-get install git`
MATLAB图像特征提取在物体识别与跟踪中的策略:实现智能化目标跟踪
# 1. MATLAB图像特征提取基础
在数字图像处理和计算机视觉领域中,图像特征提取是一个关键步骤,它涉及到从原始图像数据中提取有用信息,以便于后续处理和分析。MATLAB作为一款功能强大的数值计算和工程仿真软件,其图像处理工具箱提供了一系列功能强大的函数和接口,使得图像特征提取工作变得更为高效和直观。
## 1.1 MATLAB图像处理工具箱简介
MATLAB图像处理工具箱(Image Proc
算法优化:MATLAB高级编程在热晕相位屏仿真中的应用(专家指南)
# 1. 热晕相位屏仿真基础与MATLAB入门
热晕相位屏仿真作为一种重要的光波前误差模拟方法,在光学设计与分析中发挥着关键作用。本章将介绍热晕相位屏仿真的基础概念,并引导读者入门MATLAB,为后续章节的深入学习打下坚实的基础。
## 1.1 热晕效应概述
热晕效应是指在高功率激光系统中,由于温度变化导致的介质折射率分
Python遗传算法的并行计算:提高性能的最新技术与实现指南
# 1. 遗传算法基础与并行计算概念
遗传算法是一种启发式搜索算法,模拟自然选择和遗传学原理,在计算机科学和优化领域中被广泛应用。这种算法在搜索空间中进行迭代,通过选择、交叉(杂交)和变异操作,逐步引导种群进化出适应环境的最优解。并行计算则是指使用多个计算资源同时解决计算问题的技术,它能显著缩短问题求解时间,提高计算效率。当遗传算法与并行计算结合时,可以处理更为复杂和大规模的优化问题,其并行化的核心是减少计算过程中的冗余和依赖,使得多个种群或子种群可以独
MATLAB遗传算法在天线设计优化中的应用:提升性能的创新方法

# 1. 遗传算法的基础理论
遗传算法是计算数学中用来解决优化和搜索问题的算法,其思想来源于生物进化论和遗传学。它们被设计成模拟自然选择和遗传机制,这类算法在处理复杂的搜索空间和优化问题中表现出色。
## 1.1 遗传算法的起源与发展
遗传算法(Genetic Algorithms,GA)最早由美国学者John Holland在20世
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )