【实战演练】机器人路径规划中的强化学习
发布时间: 2024-06-27 03:26:15 阅读量: 4 订阅数: 25 
# 2.1 强化学习的原理和概念
强化学习是一种机器学习方法,它通过与环境的交互来学习最优行为。它不同于监督学习和无监督学习,因为它不需要标记的数据或明确的目标函数。
### 2.1.1 马尔可夫决策过程
马尔可夫决策过程 (MDP) 是强化学习的基本数学模型。它由以下元素组成:
- 状态空间:所有可能的环境状态的集合。
- 动作空间:所有可能动作的集合。
- 转移概率:给定当前状态和动作,转移到下一个状态的概率。
- 奖励函数:给定当前状态和动作,获得的奖励。
### 2.1.2 价值函数和策略
在 MDP 中,价值函数衡量一个状态或动作的长期收益。策略定义了在每个状态下采取的最佳动作。强化学习的目标是找到最优价值函数和策略,以最大化长期奖励。
# 2. 强化学习基础
### 2.1 强化学习的原理和概念
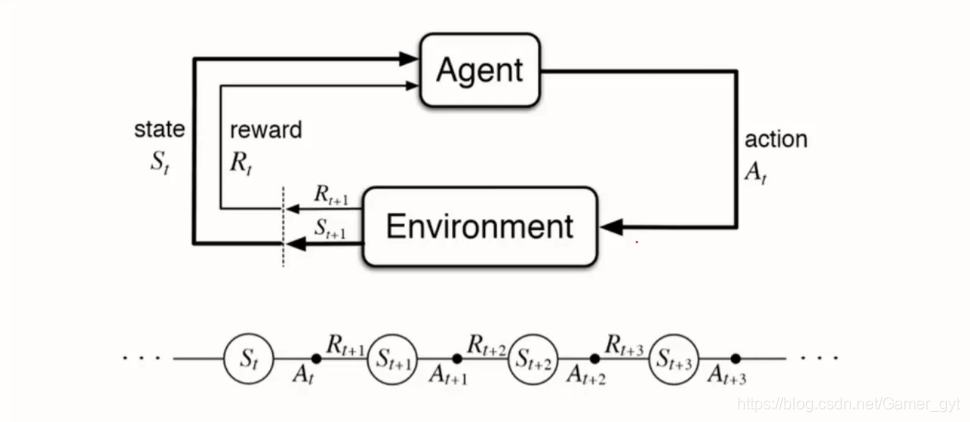
强化学习是一种机器学习范式,它允许智能体通过与环境交互并从其行为中学习来优化其行为。与监督学习不同,强化学习中没有明确的训练数据,智能体必须通过探索环境并从其经验中学习。
#### 2.1.1 马尔可夫决策过程
强化学习通常被建模为马尔可夫决策过程 (MDP),它由以下元素组成:
- **状态空间 (S)**:智能体可能处于的所有可能状态的集合。
- **动作空间 (A)**:智能体在每个状态下可以执行的所有可能动作的集合。
- **转移概率 (P)**:给定智能体当前状态和动作,它转移到下一个状态的概率分布。
- **奖励函数 (R)**:智能体在每个状态下执行特定动作后收到的奖励。
### 2.1.2 价值函数和策略
在强化学习中,两个关键的概念是价值函数和策略:
- **价值函数 (V)**:衡量智能体在特定状态下采取特定动作的长期期望奖励。
- **策略 (π)**:定义智能体在每个状态下应采取的最佳动作。
### 2.2 强化学习算法
有许多强化学习算法可以用于解决各种问题。以下是一些最常见的算法:
#### 2.2.1 值迭代法
值迭代法是一种动态规划算法,它通过迭代更新价值函数来找到最优策略。该算法遵循以下步骤:
```python
def value_iteration(env, gamma, theta):
"""
值迭代算法
参数:
env: 环境
gamma: 折扣因子
theta: 终止条件阈值
"""
# 初始化价值函数
V = np.zeros(env.observation_space.n)
# 迭代更新价值函数
while True:
delta = 0
for state in range(env.observation_space.n):
v = V[state]
# 计算状态价值
V[state] = max([sum([P(next_state, state, action) * (R(next_state, state, action) + gamma * V[next_state]) for next_state in range(env.observation_space.n)]) for action in range(env.action_space.n)])
delta = max(delta, abs(v - V[state]))
# 检查终止条件
if delta < theta:
break
# 返回最优策略
return np.argmax([sum([P(next_state, state, action) * (R(next_state, state, action) + gamma * V[next_state]) for next_state in range(env.observation_space.n)]) for action in range(env.action_space.n)]) for state in range(env.observation_space.n)
```
**逻辑分析:**
- 该算法初始化一个价值函数,然后迭代更新该函数,直到满足终止条件。
- 在每次迭代中,算法遍历所有状态,并计算每个状态的更新价值。
- 更新值是通过对所有可能动作的期望奖励求和并应用折扣因子来计算的。
- 算法停止当价值函数不再显著变化时。
#### 2.2.2 策略迭代法
策略迭代法是一种贪婪算法,它通过交替更新策略和价值函数来找到最优策略。该算法遵循以下步骤:
```python
def policy_iteration(env, gamma, theta):
"""
策略迭代算法
参数:
env: 环境
gamma: 折扣因子
theta: 终止条件阈值
"""
# 初始化策略
policy = np.random.randint(env.action_space.n, size=env.observation_space.n)
# 迭代更新策略和价值函数
while True:
# 策略评估
V = value_iteration(env, gamma, policy, theta)
# 策略改进
for state in range(env.observation_space.n):
policy[state] = np.argmax([sum([P(next_state, state, action) * (R(next_state, state, action) + gamma * V[next_state]) f
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏汇集了有关 Python 强化学习的全面文章,涵盖了从基础概念到高级技术的各个方面。专栏标题为“Python 强化学习合集”,旨在为读者提供一个一站式平台,深入了解强化学习的原理和应用。
专栏内容包括:
- 强化学习的基础知识,包括其定义、与其他机器学习方法的区别以及应用领域。
- 强化学习的核心组件,如智能体、环境、状态、奖励和价值函数。
- 奖励设计和价值函数计算等强化学习的关键技术。
通过阅读本专栏,读者将对 Python 强化学习的各个方面获得深入的理解,并能够将这些技术应用于各种实际问题中。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
线性回归在人工智能领域的应用:机器学习与深度学习的基石,赋能智能时代
# 1. 线性回归的基本原理
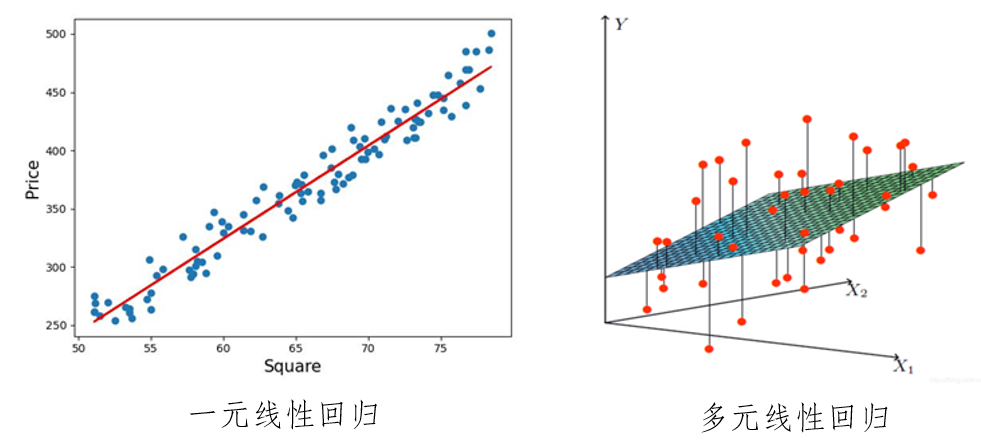
线性回归是一种监督学习算法,用于预测连续变量(因变量)与一个或多个自变量(自变量)之间的线性关系。其基本原理是:
- **模型形式:**线性回归模型表示为 `y = mx + b`,其中 `y` 是因变量,`x` 是自变量,`m` 是斜率,`b` 是截距。
- **目标函数:**线性回归的目标是找到一组 `m` 和 `b` 值,使预
多项式分解的教学创新:突破传统方法,点燃数学热情
# 1. 多项式分解的传统方法
多项式分解是代数中的基本操作,用于将复杂的多项式分解为更简单的因式。传统的多项式分解方法包括:
- **分解因式定理:**该定理指出,如果多项式 f(x) 在 x = a 处有根,则 (x - a) 是 f(x) 的因式。
- **Horner法:**该方法是一种逐步分解多项式的方法,通过反复将多项式除以 (x - a) 来确定根并分解多项式。
- **
STM32 系统设计:原理、架构与应用详解
# 1. STM32 系统概述**
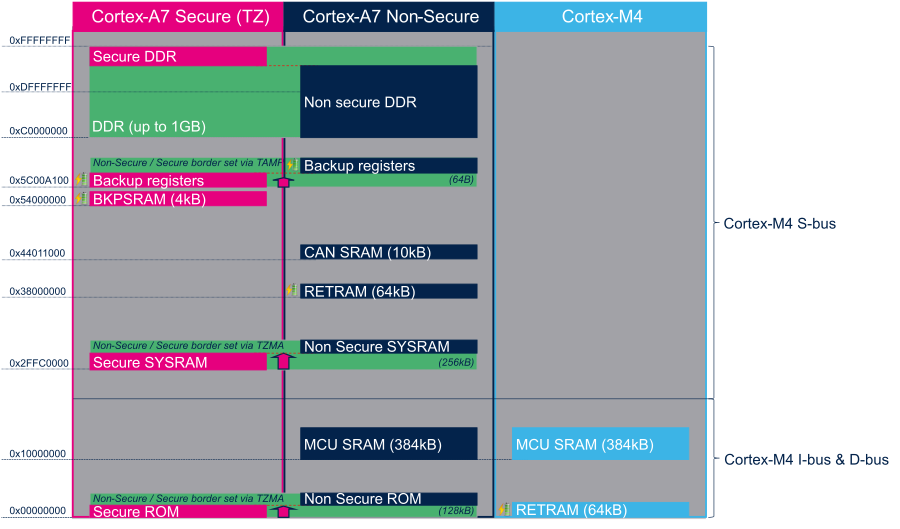
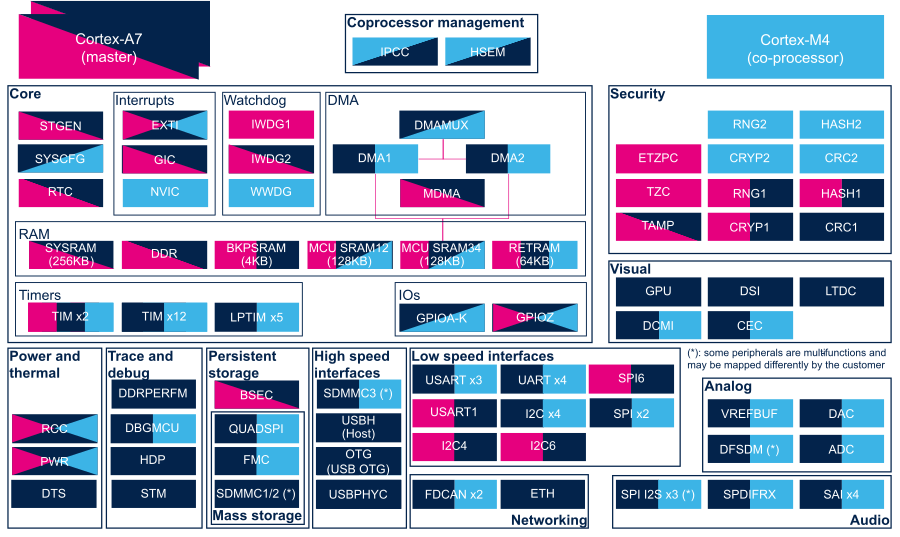
STM32 是一款基于 ARM Cortex-M 内核的微控制器系列,由意法半导体(STMicroelectronics)开发。它以其高性能、低功耗和广泛的应用而闻名,广泛用于嵌入式系统中。
STM32 系统由一个或多个 ARM Cortex-M 内核、存储器、外设和一个片上系统(SoC)组成。它提供各种外设,包括定时器、ADC、UART、SPI
STM32单片机开发板与物联网的融合:开启智能物联时代,打造万物互联的未来
# 1. STM32单片机开发板概述**
STM32单片机开发板是一种基于ARM Cortex-M系列内核的微控制器开发平台。它集成了各种外围设备和接口,为嵌入式系统开发提供了强大的硬件基础。
STM32单片机开发板具有以下特点:
- 高性能:基于ARM Cortex-M系列内核,提供高计算能力和低功耗。
- 丰富的外设:集成各种外设,如定时器、UART、SPI、I2C等,满足多种应用需求。
- 灵活的扩展性:通过扩展
STM32单片机领域专家访谈:行业洞察与技术前瞻,把握发展趋势
# 1. STM32单片机简介和发展历程
STM32单片机是意法半导体(STMicroelectronics)公司推出的32位微控制器系列。它基于ARM Cortex-M内核,具有高性能、低功耗和丰富的片上外设资源。STM32单片机广泛应用于工业控制、消费电子、汽车电子、医疗器械等领域。
STM32单片机的发展历程可以追溯到2007年,当时ST公司推出了第一款基于Cortex-M3内核的STM32F10x系列单
STM32单片机无线通信编程:连接无线世界的桥梁,拓展嵌入式应用
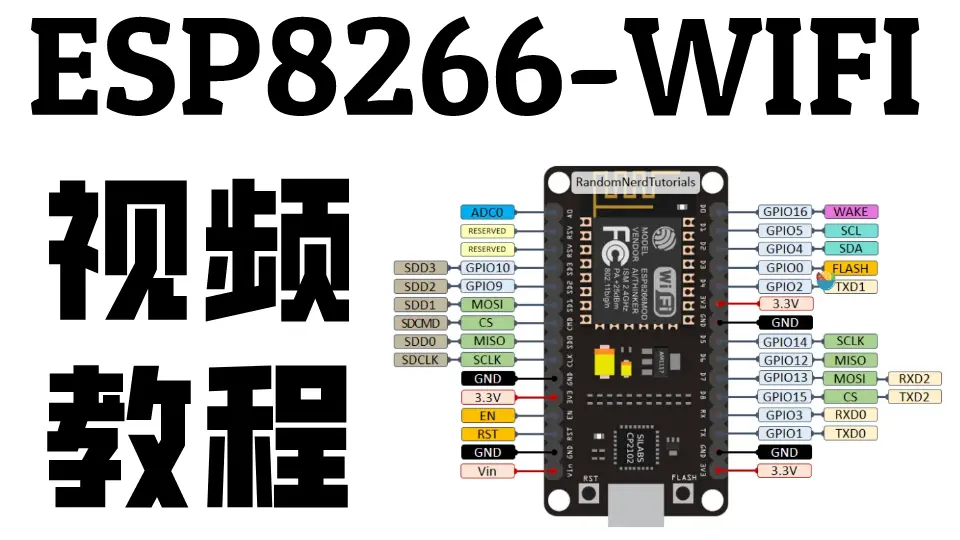
# 1. STM32单片机无线通信概述
STM32单片机广泛应用于各种嵌入式系统中,无线通信能力是其重要的特性之一。本章将概述STM32单片机的无线通信功能,包括其原理、分类、应用和硬件架构。
## 1.1 无线通信的原理和特点
无线通信是指在没有物理连接的情况下,通过无线电波或其他电磁波在设备之间传输数据的技术。其主要特点包
:瑞利分布在供应链管理中的意义:预测需求波动,优化库存管理
# 1. 瑞利分布的基本理论
瑞利分布是一种连续概率分布,它描述了非负随机变量的行为。其概率密度函数 (PDF) 为:
```
f(x) = (x / σ^2) * exp(-x^2 / 2σ^2)
```
其中,x 是随机变量,σ 是尺度参数。瑞利分布的累积分布函数 (CDF) 为:
```
F(x) = 1 - exp(-x^2 / 2σ^2)
```
瑞利分布的形状参数仅为
MySQL数据库备份与恢复:数据安全保障的基石,确保数据万无一失
# 1. MySQL数据库备份概述
MySQL数据库备份是确保数据安全和业务连续性的关键措施。备份是指将数据库中的数据复制到另一个存储介质,以便在数据丢失或损坏时进行恢复。
MySQL数据库备份技术主要分为物理备份和逻辑备份。物理备份直接复制数据库文件,而逻辑备份则导出数据库结构和数据。选择合适的备份技术取决于数据量、备份频率和恢复时间目标 (RTO)
STM32单片机编程软件底层原理:深入剖析核心技术

# 1. STM32单片机架构和编程环境
STM32单片机是一款基于ARM Cortex-M内核的微控制器,广泛应用于嵌入式系统开发。其架构主要包括处理器、存储器、外设和总线。
在编程环境方面,STM32单片机支持多种开发工具,如IAR Embedded Workbench、Keil MDK和GCC。这些工具提供编译器、调试
正则表达式替换与PowerShell:提升脚本自动化能力,掌握运维新技能
# 1. 正则表达式的基础**
正则表达式(Regex)是一种强大的工具,用于在文本中匹配、搜索和替换模式。它由一系列字符和元字符组成,这些字符和元字符定义了要匹配的模式。正则表达式可以用来验证输入、解析数据、提取信息和执行文本处理任务。
正则表达式语法基于元字符,这些元字符具有特殊含义。例如,`.` 匹配任何字符,`*` 匹配前一个字符的零次或多次出现,`+` 匹配前一个字符的一
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )