【Practical Exercise】Image Denoising Algorithms Based on Matlab: Gaussian Filtering, Mean Filtering, Median Filtering, and Bilateral Filtering
发布时间: 2024-09-15 03:33:10 阅读量: 27 订阅数: 62 
# 2.1 Principle of Gaussian Filtering
Gaussian filtering is a type of linear smoothing filter that uses a Gaussian function as its convolution kernel. The Gaussian function is a bell-shaped curve with the highest value at its center, gradually decreasing towards the sides. The principle behind Gaussian filtering is to convolve the Gaussian function with an image, thereby performing a weighted average on each pixel of the image.
The expression for the Gaussian function is:
```
G(x, y) = (1 / (2πσ^2)) * exp(-(x^2 + y^2) / (2σ^2))
```
Where σ is the standard deviation of the Gaussian function, which controls the smoothness of the filter. The larger σ is, the smoother the filter becomes, the more noise is removed from the image, but more details are also lost.
# 2. Gaussian Filtering
### 2.1 Principle of Gaussian Filtering
Gaussian filtering is a linear smoothing filter that uses a Gaussian function as its filter kernel. The Gaussian function is a bell-shaped curve, shaped by the standard deviation σ. The larger the standard deviation, the smoother the curve, and the stronger the filtering effect.
The mathematical formula for Gaussian filtering is as follows:
```
G(x, y) = (1 / (2πσ^2)) * exp(-(x^2 + y^2) / (2σ^2))
```
Where (x, y) are the pixel coordinates, and σ is the standard deviation.
### 2.2 Implementation of Gaussian Filtering
#### 2.2.1 Gaussian Filtering Function in Matlab
Matlab provides the `imgaussfilt` function for Gaussian filtering. The syntax for this function is:
```
B = imgaussfilt(A, sigma)
```
Where `A` is the input image and `sigma` is the standard deviation.
#### 2.2.2 Gaussian Filtering Parameter Settings
The main parameters for Gaussian filtering include the standard deviation `sigma`. The larger the standard deviation, the stronger the filtering effect, but it also leads to more image blur. Typically, it is recommended to set the standard deviation to an estimate of the noise in the image.
```
% Original image
I = imread('noisy_image.png');
% Set the standard deviation
sigma = 2;
% Perform Gaussian filtering
J = imgaussfilt(I, sigma);
% Display the original and filtered images
subplot(1, 2, 1);
imshow(I);
title('Original Image');
subplot(1, 2, 2);
imshow(J);
title('Image after Gaussian Filtering');
```
**Code Logic Analysis:**
* `imread('noisy_image.png')`: Reads the noisy image.
* `sigma = 2`: Sets the standard deviation to 2.
* `J = imgaussfilt(I, sigma)`: Performs Gaussian filtering on image `I`, storing the result in `J`.
* `subplot(1, 2, 1)`: Creates the first subplot to display the original image.
* `imshow(I)`: Displays the original image.
* `title('Original Image')`: Sets the title for the subplot.
* `subplot(1, 2, 2)`: Creates the second subplot to display the denoised image.
* `imshow(J)`: Displays the denoised image.
* `title('Image after Gaussian Filtering')`: Sets the title for the subplot.
**Parameter Description:**
* `sigma`: The standard deviation of the Gaussian function, controlling the filtering effect.
**Code Extension:**
```
% Comparison of Gaussian filtering effects with different standard deviations
sigma_values = [1, 2, 4, 8];
for i = 1:length(sigma_values)
sigma = sigma_values(i);
J = imgaussfilt(I, sigma);
subplot(2, 2, i);
imshow(J);
title(['Standard Deviation = ' num2str(sigma)]);
end
```
**Code Logic Analysis:**
* `sigma_values = [1, 2, 4, 8]`: Defines different standard deviation values.
* `for i = 1:length(sigma_values)`: Iterates through the standard deviation values.
* `sigma = sigma_values(i)`: Sets the current standard deviation.
* `J = imgaussfilt(I, sigma)`: Performs Gaussian filtering on image `I`, storing the result in `J`.
* `subplot(2, 2, i)`: Creates a subplot to display the denoised image with the current standard deviation.
* `imshow(J)`: Displays the denoised image.
* `title(['Standard Deviation = ' num2str(sigma)])`: Sets the title for the subplot, displaying the current standard deviation.
**Parameter Description:**
* `sigma_values`: Different standard deviation values.
# 3. Mean Filtering
### 3.1 Principle of Mean Filtering
Mean filtering is a nonlinear filtering technique that replaces the value of a pixel with the average value of the pixels in its surrounding neighborhood. The main principle is as follows:
1. **Define a neighborhood window:** For each pixel in the image, define a fixed-size neighborhood window, usually square or circular.
2. **Calculate the neighborhood average:** For each pixel, calculate the average value of all pixel values in its neighborhood window.
3. **Replace pixel values:** Replace the original pixel value with the neighborhood average.
The adva

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Arduino与光电传感器】:打造智能自动往返电动小车的20个实战技巧
# 摘要
随着自动化技术的普及,基于Arduino的光电传感器集成在电动小车上的应用越来越广泛。本文旨在系统介绍Arduino与光电传感器的基础知识、工作原理和选择标准,并提供电动小车硬件组装和编程控制小车运动的实用指南。文章进一步深入到如何利用光电传感器实现小车的自动往返功能,包括传感器数据处理和控制算法的设计与优化。最后,文章讨论了调试过程中的问题解决和性能测试,以及如何通过优化提升小
VASPKIT进阶速成:3个技巧提升材料计算效率

# 摘要
VASPKIT是一个强大的材料科学计算软件包,广泛应用于凝聚态物理和量子化学领域,提供了从基础操作到高级应用的全套功能。本文首先介绍VASPKIT的基本使用方法,涵盖文件处理、结构优化与计算流程控制。随后,深入探讨高级技巧,包括自动化脚本编写和数据后处理的高效方法。通过实践案例
【开发必备】:AT89C516RD+环境搭建与调试工具链配置

# 摘要
本论文详细介绍了AT89C516RD+微控制器的应用与开发环境搭建,并深入探讨了调试工具链的配置和使用,以实现高效的项目开发流程。首先,概述了微控制器的基本特性,接着阐述了开发环境的硬件和软件需求。随后,文章深入解析了调试工具链的各组件以及在调试过程中遇到的常见问题及其解决方案。实战演练章节通过案例分析,指导读者理解从需求分析到系统集成的完整开发过程。最后,论文探讨了代码性能优化及软件维护的最佳实践,并提供了案例分析和经验
【信号处理:如何用Time Gen进行高效分析和优化】:技术专家的实战指南

# 摘要
本文旨在介绍Time Gen工具在信号分析领域的应用,涵盖了信号处理理论基础、Time Gen的操作实践、信号优化应用以及脚本编程与自动化。首先,概述Time Gen的基本功能和界面,然后深入探讨信号处理的基本概念、数学基础和采样与重构的理论。文章接着阐述Time Gen在信号分析中的技巧和高级功能
慧鱼集成服务深度剖析:如何打造无懈可击的第三方应用生态?
# 摘要
慧鱼集成服务作为一站式集成解决方案,旨在通过第三方应用集成提升企业生态系统的服务质量和效率。本文首先介绍了慧鱼集成服务的基础概念与价值,随后深入探讨了第三方应用集成的理论基础,包括集成的原则、技术和路径。在实践操作章节,本文分析了慧鱼集成服务的应用场景,技术实现细节,以及用户支持与反馈的处理流程。文章还阐述了慧鱼集成服务的生态扩展策略、创新研发工作,以及成功案例研究。最后,本文面对
一步到位!ZXR10 2609交换机快速部署终极指南

# 摘要
本文详细探讨了ZXR10 2609交换机的配置、性能优化、安全策略和高级部署实践。首先,介绍了交换机的概述和基础配置,包括系统管理和VLAN配置。其次,分析了网络性能调优方法和监控技术,以提升网络效率和故障诊断能力。然后,详细论述了交换机的安全措施,包括用户认证、防火墙规则和入侵检测系统配置。最后,通过案例研究展示了在复杂网络环境下交换机的应用,并展望
【Exynos 4412性能揭秘】:权威指南揭示ARM核心优化秘籍

# 摘要
Exynos 4412是三星推出的一款高性能处理器,以其在市场上的独特定位和卓越性能而受到关注。本文首先介绍了Exynos 4412的基本信息及其在市场中的定位,接着深入探讨了ARM处理器架构以及Exynos 4412的架构特点和性能原理。针对性能调优,文章详细论述了系统级优化、应用程序性能提升以及芯片级特性的利用。此外,本文还分析了Ex
加密技术详解:专家级指南保护你的敏感数据
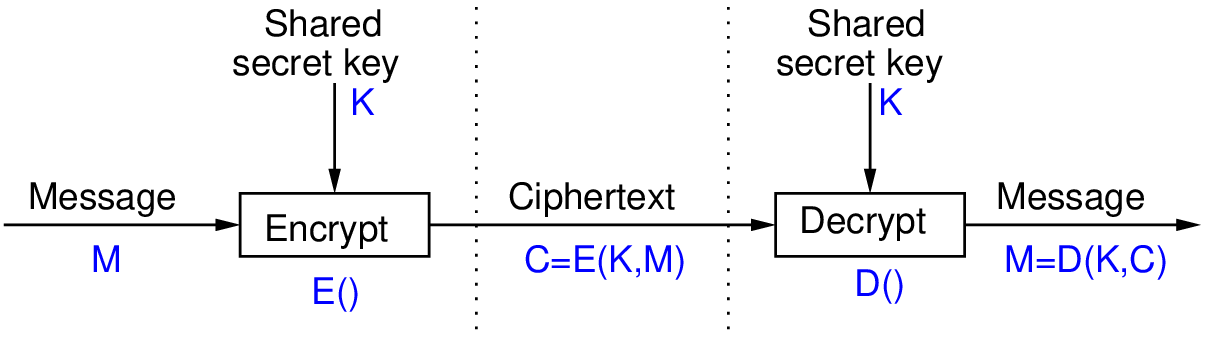
# 摘要
本文系统介绍了加密技术的基础知识,深入探讨了对称加密与非对称加密的理论和实践应用。分析了散列函数和数字签名在保证数据完整性与认证中的关键作用。进一步,本文探讨了加密技术在传输层安全协议TLS和安全套接字层SSL中的应用,以及在用户身份验证和加密策略制定中的实践。通过对企业级应用加密技术案例的分析,本文指出了实际应用中的挑战与解决方案,并讨论了相关法律和合规问题。最后,本文展望了加密技术的未来发展趋势,特别关注了量
【ArcGIS高效数据管理】:点到面转换秘籍,专家教你如何操作
# 摘要
本文全面探讨了ArcGIS在空间数据管理中的应用,重点介绍了点数据处理、点到面的转换技术、面数据管理及优化,以及ArcGIS高级应用。通过对点数据存储、检索和空间分析技术的讨论,文章深入分析了点数据在不同类型分析中的作用。随后,文章转向点到面转换的理论基础、工具和实践案例,强调转换过程中技术方法的重要性。面数据的管理与优化部分探讨了编辑、空间分
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )