【Basic】Feature Extraction and Matching of MATLAB Images
发布时间: 2024-09-15 02:52:28 阅读量: 32 订阅数: 50 

Deep Feature Extraction and Classification of Hyp.pdf
# 1. Basics of Image Feature Extraction
Image feature extraction is a critical technology in the field of computer vision. It provides a foundation for image analysis and understanding by extracting representative information from images. Image features are typically divided into global features and local features. Global features describe the statistical characteristics of an entire image, such as histograms and color covariance matrices; local features describe the characteristics of local regions of an image, such as feature points extracted by SIFT and SURF algorithms.
# 2. Theories of Image Feature Matching
### 2.1 Feature Matching Algorithms
Image ***mon feature matching algorithms include:
#### 2.1.1 Correlation Matching
Correlation matching is based on the similarity of local regions of an image. It calculates the correlation coefficient between two image blocks and finds the matching point with the highest correlation coefficient.
**Code Block:**
```python
import numpy as np
from scipy.ndimage import correlate
def correlate_match(img1, img2):
"""
Correlation matching algorithm
Parameters:
img1 (ndarray): Image 1
img2 (ndarray): Image 2
Returns:
matches (list): Matching point pairs
"""
# Calculate the correlation coefficient
corr = correlate(img1, img2)
# Find the maximum correlation coefficient
max_corr = np.max(corr)
max_idx = np.argmax(corr)
# Get matching points
matches = []
for i in range(max_idx.shape[0]):
matches.append((max_idx[i, 0], max_idx[i, 1]))
return matches
```
**Logical Analysis:**
This code uses the `scipy.ndimage.correlate` function to calculate the correlation coefficient between image blocks. The higher the correlation coefficient, the more similar the image blocks are. The code finds the maximum correlation coefficient and returns the corresponding matching points.
#### 2.1.2 Feature Point Matching
Feature p***mon feature point matching algorithms include SIFT and SURF.
**Code Block:**
```python
import cv2
def feature_match(img1, img2):
"""
Feature point matching algorithm
Parameters:
img1 (ndarray): Image 1
img2 (ndarray): Image 2
Returns:
matches (list): Matching point pairs
"""
# Detect feature points and descriptors
sift = cv2.SIFT_create()
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None)
# Match feature points
bf = cv2.BFMatcher()
matches = bf.knnMatch(des1, des2, k=2)
# Filter matching points
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
return good_matches
```
**Logical Analysis:**
This code uses the SIFT algorithm from OpenCV to detect feature points and descriptors. It uses `cv2.BFMatcher` to match feature points and filters matching points based on a distance threshold.
### 2.2 Feature Matching Evaluation Metrics
To evaluate the performance of featur

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
金蝶K3凭证接口性能调优:5大关键步骤提升系统效率
# 摘要
本论文针对金蝶K3凭证接口性能调优问题展开研究,首先对性能调优进行了基础理论的探讨,包括性能指标理解、调优目标与基准明确以及性能监控工具与方法的介绍。接着,详细分析了凭证接口的性能测试与优化策略,并着重讨论了提升系统效率的关键步骤,如数据库和应用程序层面的优化,以及系统配置与环境优化。实施性能调优后,本文还评估了调优效果,并探讨了持续性能监控与调优的重要性。通过案例研究与经验分享,本文总结了在性能调优过程中遇到的问题与解决方案,提出了调优最佳实践与建议。
# 关键字
金蝶K3;性能调优;性能监控;接口优化;系统效率;案例分析
参考资源链接:[金蝶K3凭证接口开发指南](https
【CAM350 Gerber文件导入秘籍】:彻底告别文件不兼容问题
# 摘要
本文全面介绍了CAM350软件中Gerber文件的导入、校验、编辑和集成过程。首先概述了CAM350与Gerber文件导入的基本概念和软件环境设置,随后深入探讨了Gerber文件格式的结构、扩展格式以及版本差异。文章详细阐述了在CAM350中导入Gerber文件的步骤,包括前期
【Python数据处理秘籍】:专家教你如何高效清洗和预处理数据
# 摘要
随着数据科学的快速发展,Python作为一门强大的编程语言,在数据处理领域显示出了其独特的便捷性和高效性。本文首先概述了Python在数据处理中的应用,随后深入探讨了数据清洗的理论基础和实践,包括数据质量问题的认识、数据清洗的目标与策略,以及缺失值、异常值和噪声数据的处理方法。接着,文章介绍了Pandas和NumPy等常用Python数据处理库,并具体演示了这些库在实际数
C++ Builder 6.0 高级控件应用大揭秘:让应用功能飞起来

# 摘要
本文综合探讨了C++ Builder 6.0中的高级控件应用及其优化策略。通过深入分析高级控件的类型、属性和自定义开发,文章揭示了数据感知控件、高级界面控件和系统增强控件在实际项目中的具体应用,如表格、树形和多媒体控件的技巧和集成。同时,本文提供了实用的编
【嵌入式温度监控】:51单片机与MLX90614的协同工作案例

# 摘要
本文详细介绍了嵌入式温度监控系统的设计与实现过程。首先概述了51单片机的硬件架构和编程基础,包括内存管理和开发环境介绍。接着,深入探讨了MLX90614传感器的工作原理及其与51单片机的数据通信协议。在此基础上,提出了温度监控系统的方案设计、硬件选型、电路设计以及
PyCharm效率大师:掌握这些布局技巧,开发效率翻倍提升

# 摘要
PyCharm作为一款流行的集成开发环境(IDE),受到广大Python开发者的青睐。本文旨在介绍PyCharm的基本使用、高效编码实践、项目管理优化、调试测试技巧、插件生态及其高级定制功能。从工作区布局的基础知识到高效编码的实用技巧,从项目管理的优化策略到调试和测试的进阶技术,以及如何通过插件扩展功能和个性化定制IDE,本文系统地阐述了PyCharm在
Geoda操作全攻略:空间自相关分析一步到位
# 摘要
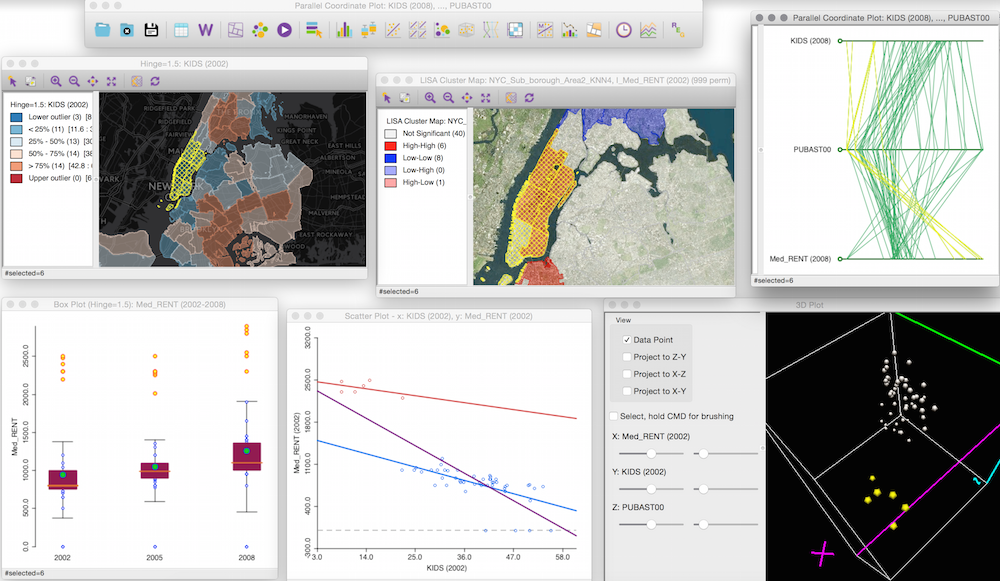
本文深入探讨了空间自相关分析在地理信息系统(GIS)研究中的应用与实践。首先介绍了空间自相关分析的基本概念和理论基础,阐明了空间数据的特性及其与传统数据的差异,并详细解释了全局与局部空间自相关分析的数学模型。随后,文章通过Geoda软件的实践操作,具体展示了空间权重矩阵构建、全局与局部空间自相关分析的计算及结果解读。本文还讨论了空间自相关分析在时间序列和多领域的高级应用,以及计算优化策略。最后,通过案例研究验证了空间自相关分析的实践价值,
【仿真参数调优策略】:如何通过BH曲线优化电磁场仿真
# 摘要
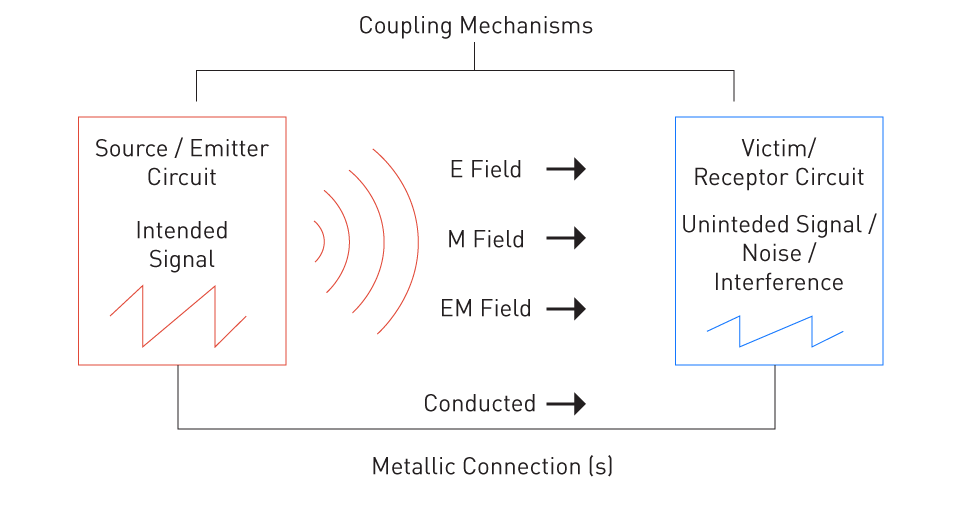
电磁场仿真在工程设计和科学研究中扮演着至关重要的角色,其中BH曲线作为描述材料磁性能的关键参数,对于仿真模型的准确建立至关重要。本文详细探讨了电磁场仿真基础与BH曲线的理论基础,以及如何通过精确的仿真模型建立和参数调优来保证仿真结果的准确性和可靠性。文中不仅介绍了BH曲线在仿真中的重要性,并且提供了仿真模型建立的步骤、仿真验证方法以
STM32高级调试技巧:9位数据宽度串口通信故障的快速诊断与解决
# 摘要
本文重点介绍了STM32微控制器与9位数据宽度串口通信的技术细节和故障诊断方法。首先概述了9位数据宽度串口通信的基础知识,随后深入探讨了串口通信的工作原理、硬件连接、数据帧格式以及初始化与配置。接着,文章详细分析了9位数据宽度通信中的故障诊断技术,包括信号完整性和电气特性标准的测量,以及实际故障案例的分析。在此基础上,本文提出了一系列故障快速解决方法,涵盖常见的问题诊断技巧和优化通
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )