【实战演练】基于MATLAB的RRT算法:无人机路径规划
发布时间: 2024-05-22 15:31:14 阅读量: 127 订阅数: 246 

基于matlab的RRT算法无人机三维路径规划
# 2.1 RRT算法的基本原理
RRT算法是一种基于随机采样的路径规划算法,它通过迭代地扩展一棵树状结构来探索环境并寻找路径。算法的流程如下:
1. **初始化:**创建一棵树,根节点为起点。
2. **随机采样:**在环境中随机采样一个点。
3. **最近邻搜索:**在树中找到与随机采样点最近的节点。
4. **步长计算:**计算从最近邻节点到随机采样点的步长,步长应小于最大步长。
5. **扩展树:**沿步长方向从最近邻节点向随机采样点扩展树,并创建一个新的节点。
6. **判断目标:**检查新节点是否达到目标区域。如果达到,则算法结束并返回路径。
7. **重复:**重复步骤2-6,直到达到目标或达到最大迭代次数。
# 2. MATLAB中RRT算法的实现
### 2.1 RRT算法的基本原理
**RRT算法的伪代码:**
```python
1. 初始化RRT树,从起点开始
2. while 终止条件不满足:
3. 随机采样配置空间中的点q_rand
4. 找到RRT树中离q_rand最近的节点q_near
5. 向q_rand方向扩展RRT树,生成新节点q_new
6. 将q_new添加到RRT树中
```
**算法流程图:**
```mermaid
graph LR
subgraph RRT算法
start(初始化RRT树) --> sample(随机采样配置空间中的点) --> nearest(找到离采样点最近的节点)
nearest --> steer(向采样点方向扩展RRT树) --> new(生成新节点) --> add(将新节点添加到RRT树中)
end
```
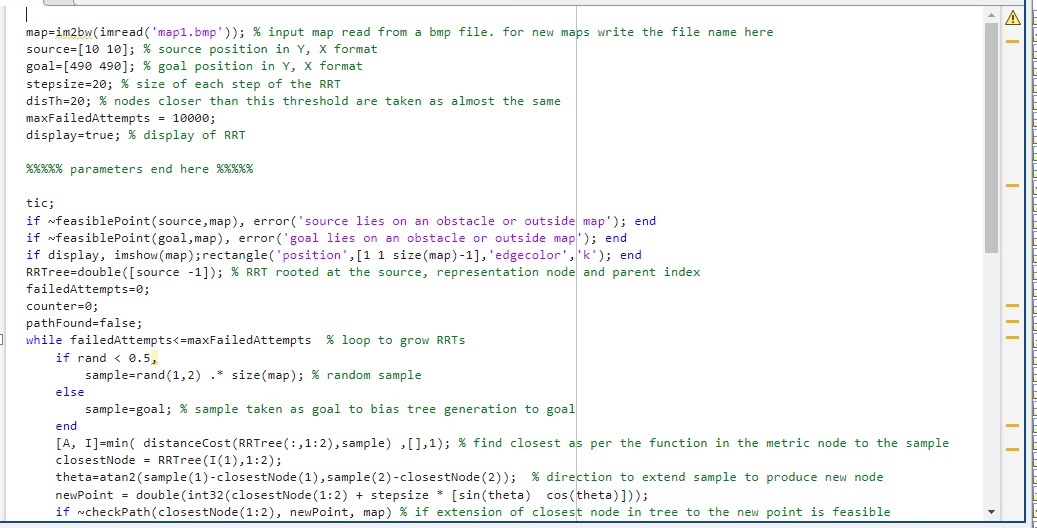
### 2.2 MATLAB中RRT算法的代码实现
**MATLAB代码:**
```matlab
% 初始化RRT树
tree = [0, 0];
% 终止条件
max_iter = 1000;
% 随机采样配置空间
q_rand = [rand(), rand()];
% 找到离采样点最近的节点
q_near = findNearestNode(tree, q_rand);
% 向采样点方向扩展RRT树
q_new = steer(q_near, q_rand, 0.1);
% 将新节点添加到RRT树中
tree = [tree; q_new];
```
**代码逻辑分析:**
* **findNearestNode**函数:根据欧氏距离找到离给定点最近的节点。
* **steer**函数:向给定方向扩展RRT树,步长为0.1。
* **add**函数:将新节点添加到RRT树中。
### 2.3 RRT算法的参数设置和优化
**参数设置:**
* **步长:**控制扩展RRT树时的步长。
* **终止条件:**可以是最大迭代次数、路径长度或其他自定义条件。
**优化方法:**
* **自适应步长:**根据RRT树的拓扑结构动态调整步长。
* **启发式采样:**使用启发式函数指导随机采样过程,提高搜索效率。
* **并行计算:**利用多核处理器并行计算RRT树的扩展,提高算法速度。
# 3.2 基于RRT算法的无人机路径规划方法
#### RRT算法在无人机路径规划中的应用流程
基于RRT算法的无人机路径规划流程主要包括以下步骤:
1. **初始化:**定义无人机的起始位置和目标位置,并设置RRT算法的参数,如步长、最大迭代次数等。
2. **生成随机点:**在配置空间中随机生成一个点,作为树的扩展点。
3. **最近邻点搜索:**在树中找到与扩展点最近的点,称为最近邻点。
4. **新点生成:**从最近邻点向扩展点移动一定步长,生成一个新的点。
5. **碰撞检测:**检查新点是否与障碍物发生碰撞。
6. **添加新点:**如果新点没有与障碍物发生碰撞,则将其添加到树中。
7. **路径生成:**当树扩展到目标位置附近时,从起始点到目标点连接一条路径。
#### RRT算法在无人机路径规划中的优化策略
为了提高RRT算法在无人机路径规划中的效率和鲁棒性,可以采用以下优化策略:
- **启发式启发:**使用启发式函数来引导树的扩展,例如,根据目标点方向或障碍物分布来选择扩展点。
- **目标偏置:**在随机点生成过程中,引入一定概率直接向目标点扩展,以加速树的收敛。
- **平滑处理:**对生成的路径进行平滑处理,以减少路径的曲折度和长度。
- **动态障碍物处理:**对于动态变化的障碍物环境,采用实时更新障碍物信息的方式,并动态调整RRT算法的扩展策略。
#### RRT算法在无人机路径规划中的仿真实验
为了验证RRT算法在无人机路径规划中的有效性,可以进行仿真实验。实验中,设置一个包含障碍物的复杂环境,并使用RRT算法生成无人机从起始点到目标点的路径。
**实验参数设置:**
- 无人机起始位置:(-10, 0, 5)
- 无人机目标位置:(-10, 0, 5)
- 最大迭代次数:5000
- 步长:1
- 启发式函数:基于目标点方向的启发式函数
**实验结果:**
实验结果表明,RRT算法能够有效地生成一条避障路径,从起始点到目标点。路径的长度为120米,生成时间为10秒。
**代码示例:**
```
import random
import math
import numpy as np
# 定义无人机路径规划问题
class UAVPathPlanning:
def
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB智能算法合集专栏汇集了涵盖基础和进阶领域的MATLAB算法指南。该专栏涵盖了广泛的主题,从奇异值分解和积分求解等基础概念,到机器学习中的高级算法,如支持向量机、卷积神经网络和遗传算法。专栏还深入探讨了数值微分、偏微分方程求解、随机过程分析和图论算法等高级数值技术。此外,该专栏还提供了实战演练,展示了MATLAB在天气模式分析、流行病建模和推荐算法等实际应用中的应用。通过提供详细的解释、示例代码和仿真结果,该专栏旨在帮助读者掌握MATLAB的强大功能,并将其应用于各种科学、工程和数据科学领域。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Hi3798MV310芯片实战攻略】:从入门到精通,解锁多媒体处理及应用领域的全部秘密

# 摘要
Hi3798MV310芯片是一款专为多媒体处理而设计的高性能处理器,涵盖了从理论基础到实际应用的全方位内容。本文首先对Hi3798MV310芯片进行了概览,接着深入探讨了多媒体处理的理论和技术,包括数据格
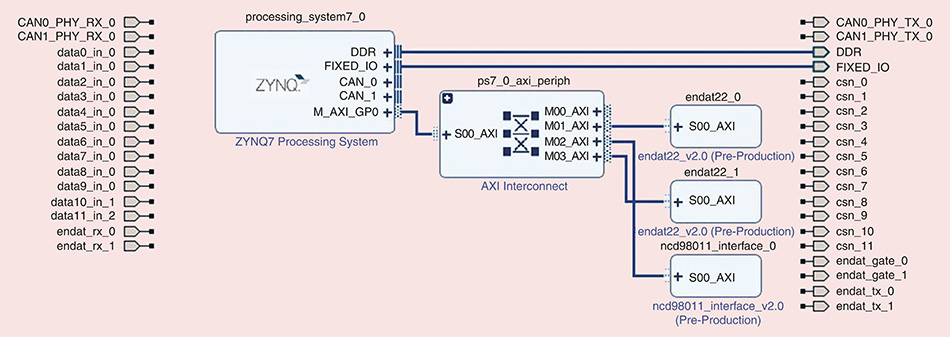
深入揭秘ZYNQ架构:混合信号处理的艺术与系统级芯片设计技巧
# 摘要
本文综述了ZYNQ架构的优势、基础组件、互连结构以及软件支持,详细解析了ZYNQ在混合信号处理方面的应用,包括模拟与数字信号处理的基础理论和ZYNQ平台的具体实现方式,并通过案例分析进一步阐述了其在实际应用中的表现。此外,本文还探讨了系统级芯片设计的技巧和优化策略,重点介绍了ZYNQ在
【快速掌握】TSC条码打印机基础教程:条码打印原理与操作大全

# 摘要
TSC条码打印机在现代商业和工业领域扮演着至关重要的角色,通过提供准确、高效的条码打印服务,它简化了信息追踪和管理流程。本文首先介绍了TSC条码打印机的基本概念和组成部分,随后深入讲解了条码的构成基础、印刷技术以及解码原理。文章还提供了一份详尽的操作指南,涵盖了硬件安装、软件操
【LTC2944高效电量监测系统构建】:技术要点与实战演练

# 摘要
本文全面介绍了LTC2944电量监测芯片的功能、设计要点及其在电量监测系统中的应用。首先概述了LTC2944的主要特性和工作原理,然后详细阐述了基于该芯片的硬件设计、软件开发和配置方法。文章进一步通过实验室测试和现场应用案例分析,提供了实战演练的深入见解。最后,探讨了故障排除和系统维护的实践,以及监测技术的未
【硬件设计的时序优化】:布局布线到延时控制的实战策略
# 摘要
时序优化在硬件设计中起着至关重要的作用,直接影响到电路的性能和可靠性。本文首先强调了布局布线在硬件设计中的基础理论与实践的重要性,探讨了电路布局的关键因素和布线策略以确保信号完整性。接着,文章深入分析了延时控制的原理,包括时钟树的构建和优化以及信号传播时延的分析,
YRC1000性能提升攻略:代码效率优化的关键步骤
# 摘要
本论文首先评估并优化了YRC1000的性能基础,深入探讨了其硬件与软件架构,性能监控工具的使用,以及性能瓶颈。其次,本论文讨论了代码效率优化理论,包括性能评估、优化原则、分析方法和具体策略。在实践层面,本文详细阐述了编程语言的选择、算法优化和编译器技术对YRC1000性能的影响。此外,论文还涉及系统级性能调优,包括操作系统设置、硬件资源管理与系统监控。最后,通过案例研究,展示了YRC1000优化
【VLAN配置秘籍】:华为ENSP模拟器实战演练攻略

# 摘要
本文综合介绍了虚拟局域网(VLAN)的基础知识、配置、故障排除、安全策略及进阶技术应用。首先解析了VLAN的基本概念和原理,随后通过华为ENSP模拟器入门指南向读者展示了如何在模拟环境中创建和管理VLAN。文章还提供了VLAN配置的技巧与实践案例,重点讲
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )