【进阶篇】有限元法:理论与MATLAB实现
发布时间: 2024-05-22 14:07:54 阅读量: 129 订阅数: 251 

# 2.1 有限元方程的求解
有限元方程的求解是有限元法中的关键步骤,它决定了有限元模型的精度和效率。常用的求解方法有直接法和迭代法。
### 2.1.1 直接法
直接法是通过求解一个大型线性方程组来直接得到未知变量的值。常用的直接法有高斯消元法和LU分解法。直接法的优点是求解精度高,收敛速度快。但是,对于大型有限元模型,直接法需要大量的计算资源,并且计算复杂度随模型规模的增加而急剧增加。
### 2.1.2 迭代法
迭代法是通过反复迭代的方式逼近未知变量的值。常用的迭代法有雅可比迭代法、高斯-赛德尔迭代法和共轭梯度法。迭代法的优点是计算资源需求较少,并且收敛速度对于大型模型也不受影响。但是,迭代法的求解精度和收敛速度取决于迭代次数和迭代算法的选择。
# 2. MATLAB中有限元法的实现
### 2.1 有限元方程的求解
有限元法的核心在于求解描述物理问题的偏微分方程组。在MATLAB中,可以使用直接法或迭代法来求解有限元方程。
#### 2.1.1 直接法
直接法是一种一次性求解所有未知数的方法。MATLAB中常用的直接法有高斯消元法和Cholesky分解法。
**高斯消元法**
```matlab
% 刚度矩阵
K = [2 -1 0; -1 2 -1; 0 -1 1];
% 载荷向量
F = [1; 0; 0];
% 求解未知位移
U = K \ F;
```
**逻辑分析:**
* 高斯消元法将刚度矩阵K转换为上三角矩阵,然后通过回代求解未知位移U。
* MATLAB中使用反斜杠运算符(\)来求解线性方程组,其中K\F表示求解方程组K*U = F。
**Cholesky分解法**
```matlab
% 刚度矩阵
K = [2 -1 0; -1 2 -1; 0 -1 1];
% Cholesky分解
[L, U] = chol(K);
% 求解未知位移
Y = L \ F;
X = U \ Y;
```
**逻辑分析:**
* Cholesky分解将刚度矩阵K分解为下三角矩阵L和上三角矩阵U的乘积。
* 求解未知位移时,先将载荷向量F分解为Y,然后求解X。
* Cholesky分解比高斯消元法更稳定,但计算量更大。
#### 2.1.2 迭代法
迭代法是一种逐次逼近解的方法。MATLAB中常用的迭代法有Jacobi迭代法和共轭梯度法。
**Jacobi迭代法**
```matlab
% 刚度矩阵
K = [2 -1 0; -1 2 -1; 0 -1 1];
% 载荷向量
F = [1; 0; 0];
% 初始猜测
U0 = zeros(size(F));
% 迭代次数
maxIter = 100;
% 迭代求解
for i = 1:maxIter
for j = 1:size(K, 1)
U0(j) = (F(j) - K(j, :) * U0) / K(j, j);
end
end
```
**逻辑分析:**
* Jacobi迭代法逐行更新未知位移,直到满足收敛条件。
* MATLAB中使用for循环来实现迭代过程。
**共轭梯度法**
```matlab
% 刚度矩阵
K = [2 -1 0; -1 2 -1; 0 -1 1];
% 载荷向量
F = [1; 0; 0];
% 初始猜测
U0 = zeros(size(F));
% 迭代次数
maxIter = 100;
% 共轭梯度法求解
[U, flag] = pcg(K, F, 1e-6, maxIter);
```
**逻辑分析:**
* 共轭梯度法是一种更有效的迭代法,它利用共轭梯度方向来加速收敛。
* MATLAB中使用pcg函数来求解共轭梯度方程组,其中K为刚度矩阵,F为载荷向量,1e-6为收敛容差,maxIter为最大迭代次数。
# 3.1 结构力学分析
有限元法在结构力学分析中得到了广泛的应用,可以解决各种复杂的结构问题,如梁的弯曲、板的振动等。
#### 3.1.1 梁的弯曲
梁的弯曲分析是结构力学中常见的问题,有限元法可以准确地计算梁的变形和内力。
```matlab
% 梁的几何参数
L = 1; % 梁长
b = 0.1; % 梁宽
h = 0.2; % 梁高
E = 200e9; % 杨氏模量
I = b*h^3/12; % 截面惯性矩
% 施加边界条件
fixed_end = 1; % 固定端
free_end = 2; % 自由端
u_fixed = 0; % 固定端的位移
theta_fixed = 0; % 固定端的转角
P = 1000; % 集中力大小
% 网格划分
n_elements = 10; % 单元数
x = linspace(0, L, n_elements+1); % 节点坐标
% 组装刚度矩阵和载荷向量
K = zeros(2*(n_elements+1)); % 刚度矩阵
F = zeros(2*(n_elements+1), 1); % 载荷向量
for i = 1:n_elements
% 单元刚度矩阵
k = [E*I/L^3, -E*I/L^2, -E*I/L^3, E*I/L^2;
-E*I/L^2, 4*E*I/L^3, E*I/L^2, -2*E*I/L^3;
-E*I/L^3, E*I/L^2, E*I/L^3, -E*I/L^2;
E*I/L^2, -2*E*I/L^3, -E*I/L^2, 4*E*I/L^3];
% 单元载荷向量
f = [0; -P/2; 0; P/2];
% 组装刚度矩阵和载荷向量
K(2*i-1:2*i+2, 2*i-1:2*i+2) = K(2*i-1:2*i+2,
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
MATLAB智能算法合集专栏汇集了涵盖基础和进阶领域的MATLAB算法指南。该专栏涵盖了广泛的主题,从奇异值分解和积分求解等基础概念,到机器学习中的高级算法,如支持向量机、卷积神经网络和遗传算法。专栏还深入探讨了数值微分、偏微分方程求解、随机过程分析和图论算法等高级数值技术。此外,该专栏还提供了实战演练,展示了MATLAB在天气模式分析、流行病建模和推荐算法等实际应用中的应用。通过提供详细的解释、示例代码和仿真结果,该专栏旨在帮助读者掌握MATLAB的强大功能,并将其应用于各种科学、工程和数据科学领域。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【从零到一精通Fluent】:深入解析离散相模型核心概念与实战应用
# 摘要
本文全面介绍了Fluent离散相模型的基础理论、配置设置、分析方法以及高级应用。首先概述了离散相模型的物理和数学基础,随后详细阐述了在Fluent中如何配置和进行仿真分析,并对仿真结果进行后处理和优化。进一步,本文探讨了离散相模型的定制化开发,工业应用案例以及未来的发展趋势,包括高性能计算和机器学习技术的整合。最后,通过实战演练的方式,展示了从建模准备到仿真操作,再到结果分析与报告撰写
【ROSTCM自然语言处理基础】:从文本清洗到情感分析,彻底掌握NLP全过程
# 摘要
本文全面探讨了自然语言处理(NLP)的各个方面,涵盖了从文本预处理到高级特征提取、情感分析和前沿技术的讨论。文章首先介绍了NLP的基本概念,并深入研究了文本预处理与清洗的过程,包括理论基础、实践技术及其优
【Java集合框架:核心接口深入剖析】
# 摘要
Java集合框架为数据存储和操作提供了丰富的接口和类,是Java语言中不可或缺的一部分。本文首先概述了Java集合框架的基本概念及其核心接口的继承结构和特点。接着,详细探讨了List、Set和Map这些核心接口的具体实现,包括各自的工作原理和特性差异。第三章着重于集合框架的性能优化,包括如何根据不同的应用场景选择合适的集合类型,以及深入理解集合的扩容机制和内存管理。最后,本文通过实例阐
BP1048B2的可维护性提升:制定高效维护策略,专家教你这么做
# 摘要
本文详细探讨了BP1048B2系统的可维护性,涵盖了从理论基础到高级应用以及实践案例分析的全过程。首先,本文阐明了系统可维护性的定义、意义以及其在系统生命周期中的重要性,并介绍了提升可维护性的策略理论和评估方法。接着,文章深入介绍了在BP1048B2系统中实施维护策略的具体实践,包括维护流程优化、工具与技术的选择、持续改进及风险管理措施。进一步,本文探索了自动化技术、云原生维护以及智能监控和预测性
【蓝凌KMSV15.0:知识地图构建与应用指南】:高效组织知识的秘密

# 摘要
知识地图作为一种高效的知识管理工具,在现代企业中扮演着至关重要的角色。本文首先介绍了知识地图构建的理论基础,随后概述了蓝凌KMSV15.0系统的整体架构。通过详细阐述构建知识地图的实践流程,本文揭示了知识分类体系设计和标签管理的重要性,以及创建和编辑知识地图的有效方法和步骤。文章进一步探讨了知识地图在企业中的实际应用,包括提高知识管理效率、促进知识共享
【充电桩国际化战略】:DIN 70121标准的海外应用与挑战
# 摘要
随着全球电动车辆市场的快速发展,充电桩技术及其国际化应用变得日益重要。本文首先介绍了充电桩技术及其国际化背景,详细解读了DIN 70121标准的核心要求和技术参数,并探讨了其与国际标准的对接和兼容性。随后,本文分析了海外市场拓展的策略,包括市场分析、战略合作伙伴的选择与管理,以及法规合规与认证流程。接着,针对面临的挑战,提出了技术标准本地化适配、市场接受度提升以及竞争策略与品牌建设等解决方案。最后,通过对成功案例的研究,总结了行业面临的挑战与发展趋势,并提出了战略规划与持续发展的保障措施。
# 关键字
充电桩技术;DIN 70121标准;市场拓展;本地化适配;用户教育;品牌建设
SD4.0协议中文翻译版本详解
# 摘要
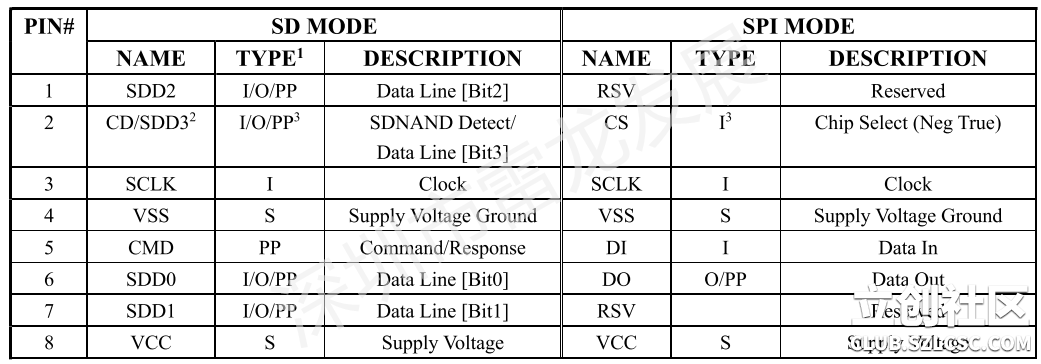
SD4.0协议作为数据存储领域的重要标准,通过其核心技术的不断演进,为数据存储设备和移动设备的性能提升提供了强有力的技术支持。本文对SD4.0协议进行了全面的概述,包括物理层的规范更新、数据传输机制的改进以及安全特性的增强。文章还详细对比分析了SD4.0协议的中文翻译版本,评估了翻译准确性并探讨了其应用场景。此外,本文通过对SD4
【51单片机电子时钟设计要点】:深度解析项目成功的关键步骤
# 摘要
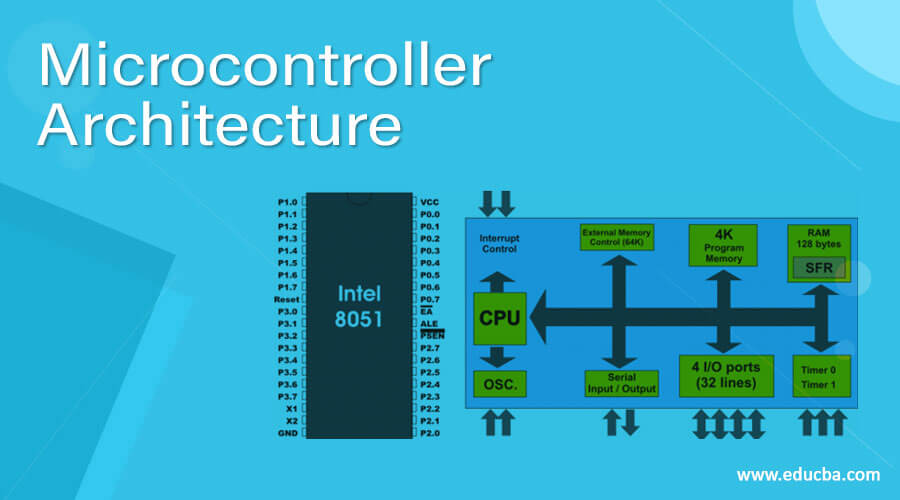
本论文详细介绍了51单片机电子时钟项目的设计与实现过程。从硬件设计与选择到软件架构开发,再到系统集成与测试,每个关键环节均进行了深入探讨。章节二详细分析了51单片机特性选型,显示模块与电源模块的设计标准和实现方法。在软件设计方面,本文阐述了电子时钟软件架构及其关键功能模块,以及时间管理算法和用户交互的设计。系统集成与测试章节强调了软硬件协同工作的机制和集成过程中的问题解决策略。最后,
【数值计算高手进阶】:面积分与线积分的高级技术大公开

# 摘要
本文系统地探讨了数值计算与积分的基础理论及计算方法,特别是面积分和线积分的定义、性质和计算技巧。文中详细介绍了面积分和线积分的标准计算方法,如参数化方法、Green公式、Stokes定理等,以及它们的高级技术应用,如分片多项式近似和数值积分方法。此外,本文还分析了数值计算软件如MATLAB、Mathematica和Maple在积分计
Mamba SSM版本升级攻略:1.1.3到1.2.0的常见问题解答
# 摘要
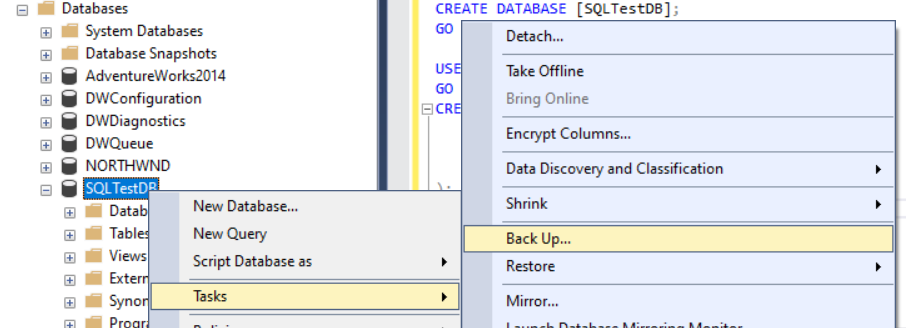
本文详细论述了Mamba SSM版本从1.1.3升级到1.2.0的全过程,涵盖了升级前的准备工作、具体升级步骤、升级后的功能与性能改进以及遇到的问题和解决方法。通过环境评估、依赖性分析和数据备份,确
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )